ArduIMU - a copter on Arduino
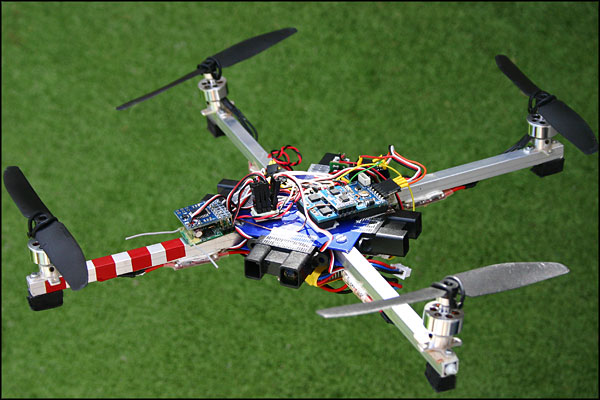
ArduIMU is an Inertial measurement Unit based on the Arduino for the kopter (thanks vlady for the clarification). This helicopter has on board 4 infrared sensors and one ultrasonic, so that it can automatically bypass obstacles.
The quadcopter uses ArduIMU as a platform gyro and a brain for stabilization.
Project Journal .
')
Source: https://habr.com/ru/post/95464/
All Articles