Meet: MiniBot
This is the MiniBot, in person.
I think many programmers are interested in robots. Just try to program the robot, experiment with it ... But first you need to develop a scheme, etch the board, solder, debug ... Not the most interesting step for the programmer, and given the low knowledge in radio engineering (for example, for me :)) it’s not at all guaranteed that the end will work. There is a possibility that a lot of time and money will be wasted. In general, many, I think, would gladly have missed this stage, proceeding directly to programming. And different devices and sensors would simply be connected, sticking them into the expansion slots.
Given this, as well as the fact that most people interested in robotics go through essentially the same steps (they design a microcontroller-based circuit, make a power unit, connect a screen, etc.) enthusiasts with roboforum.ru have developed a MiniBot.
')
What kind of beast is this MiniBot? In short, Minibot is a simple ready-made robot for beginners.
So, this is a robot based on ATMega32 ATMega32 microcontroller. In the minimum configuration there is only a board with a microcontroller and a battery from a cell phone. Then you can choose which sensors you want to put on the robot, you can order a ready-made chassis (one of the examples of the chassis in the photo) or make the chassis yourself (on roboforum.ru there are examples of tracked chassis, etc.). In the basic configuration, Minibot has 2 two-color LEDs (you can say it is a 2-color two-pixel screen :)), but this is certainly not enough for displaying information, so you can pick up different monochrome and color small screens from cell phones (I bought and connected a screen from Siemens S65) . The screen connects very easily, just plug into the connector, almost PlugAndPlay. :)

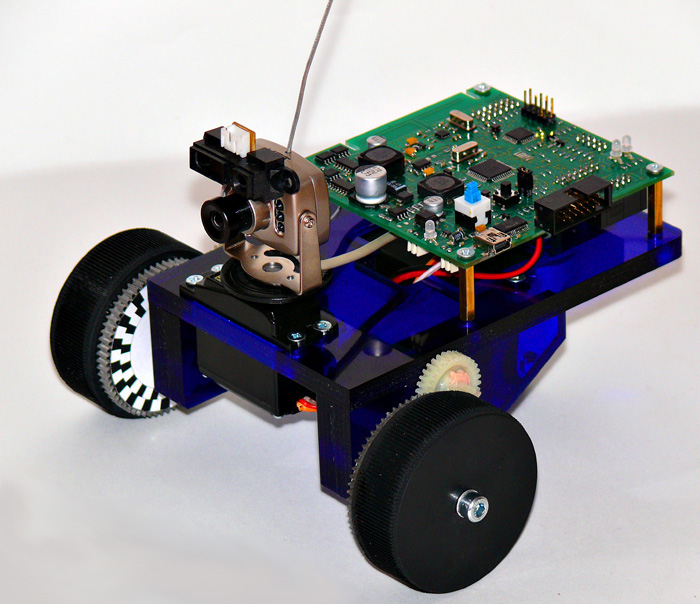
MiniBot fee with explanations.
You can put a camera on it so that the robot can see, and / or servomotors so that it can turn it. The photo is just a camera located on the server (and the infrared range on it). You can expand the memory by putting a microSD flash drive (I have 2Gb 2). You can put the speaker, and Minibot can make sounds. You can buy beacons, which is configured some kind of home GPS, only local and within the apartment. You can also install a wireless module so that the robot can communicate with the computer (you can also communicate via USB, but agree that the robot on the wire is not the best option :)). I don’t even remember everything now, any sensors and devices are connected. After you choose what you need (do not forget about the programmer), just in case, consult and can pay and wait for the parcel.

Each set is packed with love with the delicate hands of Packer No. 1 and undergoes comprehensive pre-sale training.
After talking with the developers, I learned that you can connect a PDA to the robot, and then either the robot can use the PDA resources (screen, camera, something else), or vice versa - the main program can be done on the PDA, and the PDA will already control the robot as connected device, and take data from its sensors and give it commands. Naturally, for this you need to write programs for the PDA and the robot, one main one that will control, the other auxiliary one - which will listen to the commands coming from the USB and execute and send the answers. But there is one nuance - as the developers said - the PDA must support the USB host function so that MiniBot can pick it up (of course, you still need to download the drivers). Unfortunately, my communicator does not support such a function, so this point for me has remained purely theoretical. With a computer connected via USB wire, everything works fine.
Of course, there is no practical benefit, just a cool toy. Only moral satisfaction, which is also important. The project is open and develops, share your achievements, algorithms, people will find this very useful. There are original solutions, for example, the guy didn’t navigate the beacons, but hanging out printed 2D barcodes around the apartment. The robot drove, looked at the camera and orientated itself in the space of these pictures.
Given that the developers set a goal not to make money, but to promote this platform of the robot to the masses, the prices for it are very low. The basic equipment (a board with ATMega32 and small things like buttons and LEDs, a battery from a cell, a USB cable, a CD with software and drivers) costs 750 rubles. You can count how much it all costs if you buy separately. Plus you still need to solder. Sometimes there are contests for connecting a device, developing a logo, some other, cash prizes and MiniBots.
In general, that's all who are interested in the project in the conclusion of a few links:
MiniBot section on roboforum.ru
MiniBot Wiki
Source: https://habr.com/ru/post/88509/
All Articles