Ant-bot. Worklog. Part 1
Greetings to all readers!
Even this summer, I was overwhelmed with the idea of creating several miniature robots and teaching them to communicate with each other. When you create a single robot, it already has a predefined basic set of functions and the rest of the functionality is determined only by the size of the budget. :) Collective intelligence is more interesting because with the standard abilities of a robot (avoiding an obstacle, calculating the distance traveled, etc.) it is possible to install communication tools with other similar robots on it. And together they could already solve problems for which more time would be spent if they solved them one by one (example: searching for a route from t. A to t. B).
And as far as possible I will describe the course of my work in this direction.
How it all began.
It was necessary to be determined primarily with the mechanics, because the dimensions of the robot depended mainly on it. In the open spaces of the Network, a good store was found that supplies parts for robot builders : www.sparkfun.com
I wanted to make a high-quality model and therefore engines with gearboxes were ordered there:

')
wheels to them:

and, to the heap, several such sensors:

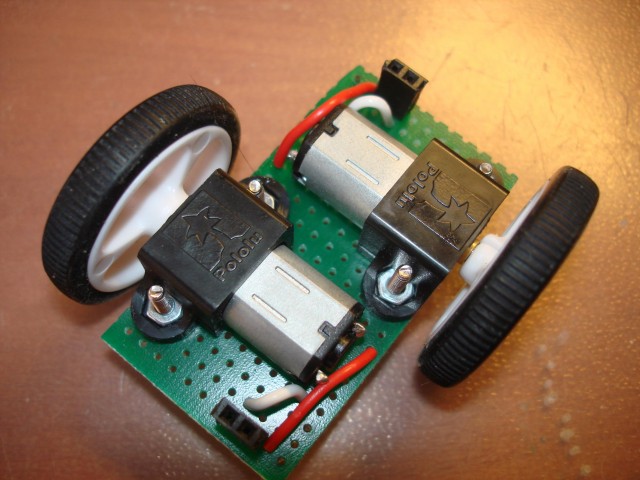
The robot itself was decided to assemble on the principle of "sandwich".
On the first "layer" were located the engines and driver:

On the second layer was the controller and other electronics:
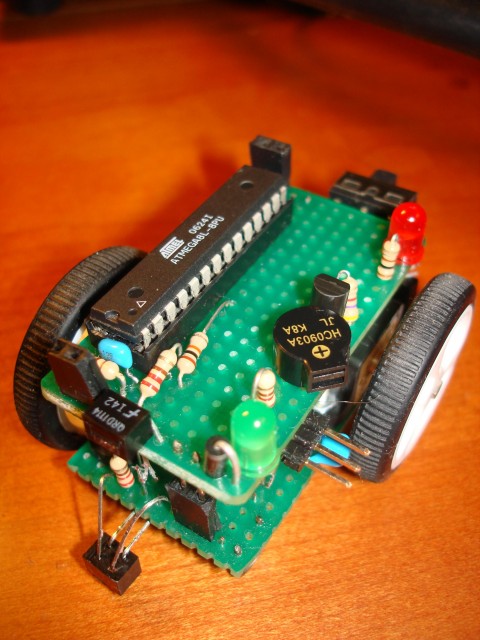
Since the communication scheme was not yet worked out, then at an early stage the robot looked like this:

The sizes were pretty tiny: 55x50 mm.
"Ant" have the following functions:
- obstacle detection
- surface edge detection
- light sensor (in the absence of light began to look for him, running faster)
- mood indicators
- sound signals
Robot video:
What's next
And then I was torn over two projects - this and the caterpillar robot, about which you can read here: habrahabr.ru/blogs/DIY/76128
Therefore, the “layer” with the communication scheme is podzagloh, and the robot itself began to fall apart due to a not very high-quality circuit board.
The idea was a little forgotten because of the beginning of the semester and the time was not enough. And now I again caught fire with this thought And quietly resuming work on the project. The scheme will be changed, the motors will be positioned coaxially and the body will be made of thin PCB. The most important principle will be that all the circuits will not be manufactured on printed circuit boards, but will be placed “on weight” in order to give the robot more “bionic” something. :)
The same battery was spared from its plastic case, which is why it decreased in size.
Now I work on the theory of the communication scheme.
Its essence is that there are transmitters around the perimeter of the robot, which send different signals and receivers to receive signals from other robots. Since the signals are different, the robots can determine their location relative to each other and accordingly move in the right direction, and the accuracy of the movement will be determined by the installed encoders.
Actually, that's all for now. After the New Year I will publish the following stages of my work.
Thank you all!
Source: https://habr.com/ru/post/79492/
All Articles