Two-legged robot in theory
So, ladies and gentlemen, you and I have lived to see the moment when an evil scientist can afford to create an army of monstrous killer robots carrying horror and destruction. I will deal with the destruction of humanity later, and now I will try to theoretically prove the possibility of creating a rather frisky two-legged chassis for a biped robot.

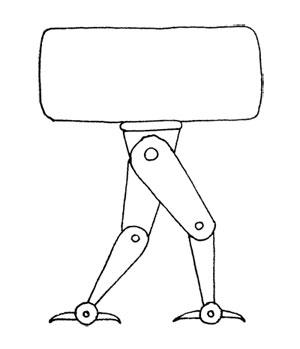
What would you like to receive? I would be satisfied with a chassis weighing about 1 kg, with limbs consisting of two “bones” each 5 cm long. It would be nice to rotate the legs at a speed of 2 rev / s, because the running monster gives more horror. It is important to ease the legs as much as their movement during walking will disturb the balance. In the limbs, the engines have the greatest weight, which means we will place the outside of the legs.
')
It turned out something like an ostrich. Not so terrible, it would be necessary later to work on it.
Now it is necessary to count a little, even approximately.
Each part of a foot 5 cm long must support the weight of the entire chassis - 10 N (with a weight of 1 kg on planet Earth). The required moment of force will be the product of the length of the lever by the force applied to its end:
T = L · F;
T = 0.05 m · 10 N = 0.5 Nm,
where T is the moment of force, L is the length of the lever, F is the applied force.
We ought to pick up the engine. The best option would be beskollektornye engines used in models of electric aircraft. They weigh little, develop more power and have high efficiency. The minimum engine power P is equal to the product of the moment of force T of the lever by the angular velocity of rotation V of it:
P = T · 2pi · V;
P = 0.5 Nm · 6.2832 · 2 rev / sec = 6.2832 W,
where P is the engine power, V is the angular velocity.
Eeee ... Well, do not waste time on trifles, the power of 12 W will be enough. It will look worthy of the engine like Hacker A10-15S (no advertising, the first eye on the engine).

Specifications:
U = 7 V; I = 4.6 A; RPM = 11270 rpm; P = 33 watts.
It would be nice to know the moment of the engine ...
T = P / (2pi · V);
T = 33 W / (6.2832 · 187.8 rev / sec) = 0.028 Nm,
where T is the moment of force, P is the engine power, V is the angular velocity.
... as well as the parameters of the gearbox, remembering that the foot should have a torque Tout of 0.5 Nm at an angular velocity of Vout at 2 rev / sec, and the engine gives 11270 ... well, 10,000 rev / min:
Twx · Vin = Tout · Vout;
Tvkh = (Tvyh · Vvyh) / Vvkh;
Tw = (0.5 Nm · 2 rev / sec) / 166 rev / sec = 0.006 Nm,
where Twr and Twr are the moments at the input and output of the gearbox, Vin and Vout are the turnovers, respectively.
Gear Ratio N:
N = Vin: Vout;
N = 166: 2 = 83: 1,
where N is the gear ratio, Vin and Vout are the speeds at the input and output.
There was also a power reserve, even if the efficiency of the gearbox is 50%:
(0.028 Nm · 0.5): 0.006 Nm
0.014 Nm: 0.006 Nm
2.33: 1
Moreover, due to the fact that the legs are located almost in parallel with the gravity vector G, less energy will be used to move. For example, for a perpendicular between the leg and the vector G, you need to spend 100% of the power, and for an angle of 30 degrees - no more than 50%.
It's time to estimate the leg mechanics on paper. Rummaging through the old books, I found what was needed — bevel gears in the hinges and tubular shafts. For this case, it looks like this:
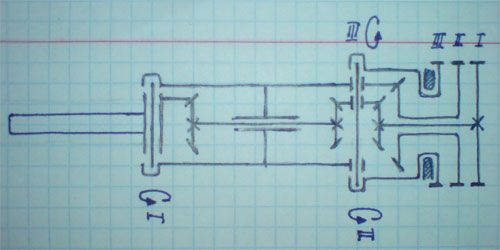
It will take one motor for the joints I and II for each leg. One engine should suffice for both hinges III, because the load is weaker there. Just five.
LiPo batteries for aeromodelling are excellent for power supply. They are lightweight, have sufficient capacity and can give off huge currents. I caught sight of a battery of an unknown manufacturer with a voltage of 7.4 V and a capacity of 2200 mAh, which can give up to 22 A. It already sounds terrifying. Engines eat a lot, namely 23A jointly. During peak powers, these monsters will be even more voracious, so one battery is indispensable. Take three. A charge of 6600 mAh at rated load and not the best conditions will last about fifteen minutes.
Now to calculate how much the offal weighs the creator of the apocalypse:
- The engine weight is 15 g, the total will be 75 g;
- The mass of the battery does not exceed 110 g, three pieces - 330 g;
- 70 g is enough for a reducer, 350 g for five;
- electronics will fit in 45 g;
- the chassis itself, capable of withstanding the necessary overloads, should not be heavier than 200 g.
Total: 75 + 330 + 350 + 45 + 200 = 1000 g
You also need to add a lot of money and production resources.
What would you like to receive? I would be satisfied with a chassis weighing about 1 kg, with limbs consisting of two “bones” each 5 cm long. It would be nice to rotate the legs at a speed of 2 rev / s, because the running monster gives more horror. It is important to ease the legs as much as their movement during walking will disturb the balance. In the limbs, the engines have the greatest weight, which means we will place the outside of the legs.
')
It turned out something like an ostrich. Not so terrible, it would be necessary later to work on it.
Now it is necessary to count a little, even approximately.
Each part of a foot 5 cm long must support the weight of the entire chassis - 10 N (with a weight of 1 kg on planet Earth). The required moment of force will be the product of the length of the lever by the force applied to its end:
T = L · F;
T = 0.05 m · 10 N = 0.5 Nm,
where T is the moment of force, L is the length of the lever, F is the applied force.
We ought to pick up the engine. The best option would be beskollektornye engines used in models of electric aircraft. They weigh little, develop more power and have high efficiency. The minimum engine power P is equal to the product of the moment of force T of the lever by the angular velocity of rotation V of it:
P = T · 2pi · V;
P = 0.5 Nm · 6.2832 · 2 rev / sec = 6.2832 W,
where P is the engine power, V is the angular velocity.
Eeee ... Well, do not waste time on trifles, the power of 12 W will be enough. It will look worthy of the engine like Hacker A10-15S (no advertising, the first eye on the engine).
Specifications:
U = 7 V; I = 4.6 A; RPM = 11270 rpm; P = 33 watts.
It would be nice to know the moment of the engine ...
T = P / (2pi · V);
T = 33 W / (6.2832 · 187.8 rev / sec) = 0.028 Nm,
where T is the moment of force, P is the engine power, V is the angular velocity.
... as well as the parameters of the gearbox, remembering that the foot should have a torque Tout of 0.5 Nm at an angular velocity of Vout at 2 rev / sec, and the engine gives 11270 ... well, 10,000 rev / min:
Twx · Vin = Tout · Vout;
Tvkh = (Tvyh · Vvyh) / Vvkh;
Tw = (0.5 Nm · 2 rev / sec) / 166 rev / sec = 0.006 Nm,
where Twr and Twr are the moments at the input and output of the gearbox, Vin and Vout are the turnovers, respectively.
Gear Ratio N:
N = Vin: Vout;
N = 166: 2 = 83: 1,
where N is the gear ratio, Vin and Vout are the speeds at the input and output.
There was also a power reserve, even if the efficiency of the gearbox is 50%:
(0.028 Nm · 0.5): 0.006 Nm
0.014 Nm: 0.006 Nm
2.33: 1
Moreover, due to the fact that the legs are located almost in parallel with the gravity vector G, less energy will be used to move. For example, for a perpendicular between the leg and the vector G, you need to spend 100% of the power, and for an angle of 30 degrees - no more than 50%.
It's time to estimate the leg mechanics on paper. Rummaging through the old books, I found what was needed — bevel gears in the hinges and tubular shafts. For this case, it looks like this:
It will take one motor for the joints I and II for each leg. One engine should suffice for both hinges III, because the load is weaker there. Just five.
LiPo batteries for aeromodelling are excellent for power supply. They are lightweight, have sufficient capacity and can give off huge currents. I caught sight of a battery of an unknown manufacturer with a voltage of 7.4 V and a capacity of 2200 mAh, which can give up to 22 A. It already sounds terrifying. Engines eat a lot, namely 23A jointly. During peak powers, these monsters will be even more voracious, so one battery is indispensable. Take three. A charge of 6600 mAh at rated load and not the best conditions will last about fifteen minutes.
Now to calculate how much the offal weighs the creator of the apocalypse:
- The engine weight is 15 g, the total will be 75 g;
- The mass of the battery does not exceed 110 g, three pieces - 330 g;
- 70 g is enough for a reducer, 350 g for five;
- electronics will fit in 45 g;
- the chassis itself, capable of withstanding the necessary overloads, should not be heavier than 200 g.
Total: 75 + 330 + 350 + 45 + 200 = 1000 g
You also need to add a lot of money and production resources.
Source: https://habr.com/ru/post/53235/
All Articles