DIY acoustic levitation
Today I will tell and show how to repeat the effect of ultrasonic levitation with my own hands at home.
In previous articles, one , two . I demonstrated pseudo levitation. This time it's all real. I'll start with the theory.
Sound vibrations
To understand the whole essence of the levitation effect, you need to understand what a sound wave and a standing wave are.
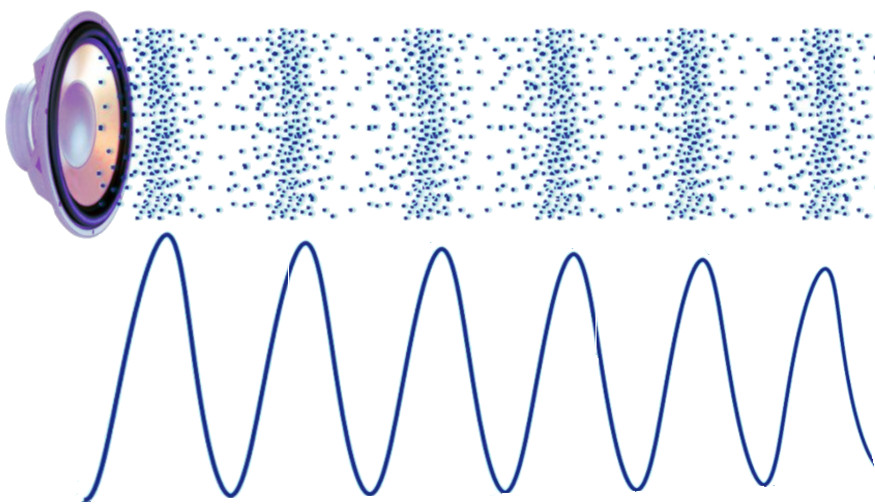
Therefore, I will start with them. An acoustic wave propagates in all directions and consists of two half-waves, positive and negative. A positive half-wave is a compression zone or high pressure, in the future I will call it compression, and a negative half-wave a discharge zone, we will call it decompression.
')
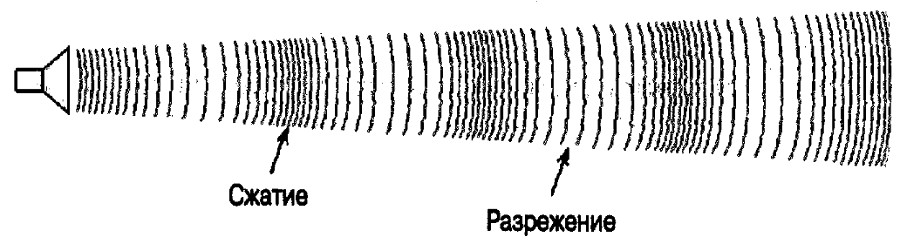
In practice, it looks like this: The speaker diffuser creates compression when moving outward, and decompresses when moving inward. This is clearly shown in the image.
The maximum wave power is created near the dynamic head diffuser and, as it moves away from the emitter, it gradually loses its power, the further away from the speaker the weaker it is.
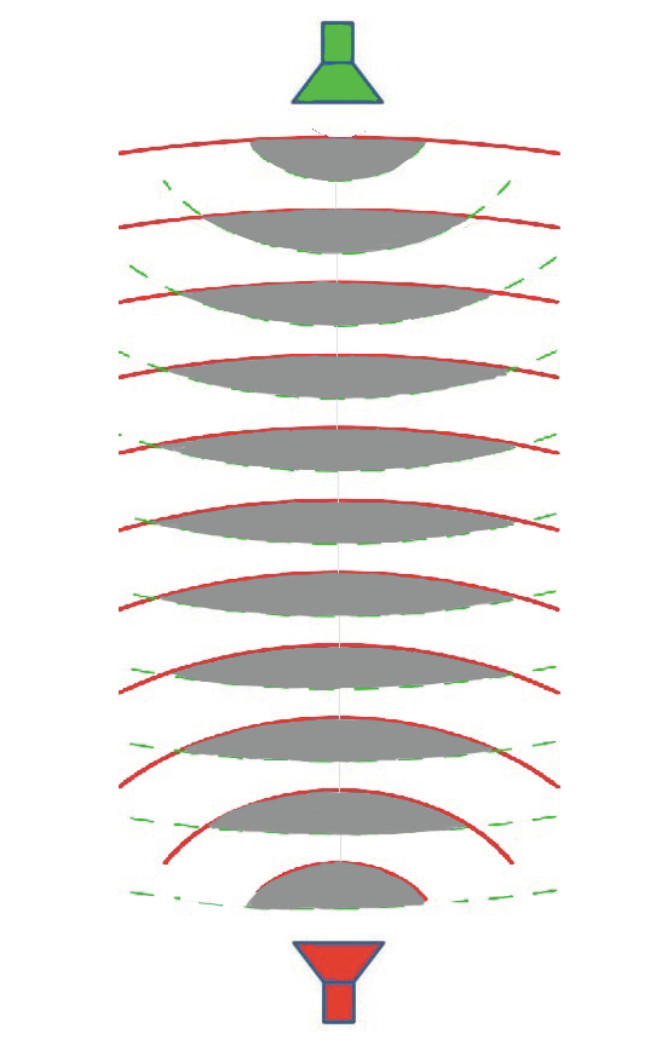
A standing wave is a wave that is formed when superimposed two counterpropagating, coinciding in phase and with the same wave frequency. If an ordinary wave loses its power in the process of propagation in space, then standing waves at small distances form nodes with approximately equal power. This is achieved by folding multidirectional waves. The weakening wave is amplified by the oncoming wave. To understand how this happens, look at the image below. Nodes are marked in gray, or in our case, shelves of standing waves. On these shelves (nodes) and held items.
The wavelength is the speed of sound divided by the frequency of oscillations. At a temperature of 20 ° C and an air humidity of 50%, sound propagates in such an environment at a speed of 340 m / s. The resonant oscillation frequency of our piezo emitter is approximately 40,000 Hz. As a result, we obtain a wavelength of 340,000 mm / 40,000 Hz = 8.5 mm. The standing wavelength will be the same 8.5 mm.
The emitters can be located at different distances from each other, but it should always be a multiple of the wavelength. The smaller the distance between the emitters, the more powerful the nodes of the standing wave. The more space between the acoustic transmitters, the more nodes between them, but the power of the nodes weakens and vice versa. You also need to understand that to hold a large number of objects in the nodes of the waves and at a greater distance between ultrasonic emitters, more powerful piezo heads will be required. For example, from car parking radars, or from household humidifiers. In this article, I consider the most affordable and affordable ultrasonic emitter. Which can be removed from the HC-SR04 rangefinder.
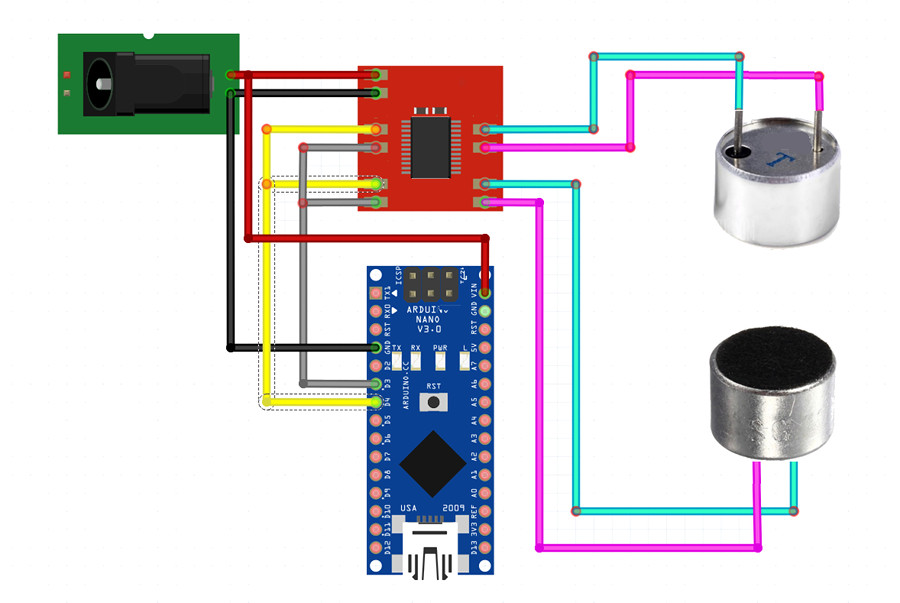
Connection diagram - I used Arduino nano and the MX1508 motor driver, I could have done with the NE555 generator, and as an amplifier for the emitters, use the MAX232 chip installed on the HC-SR04 rangefinder, but I chose a simpler path for myself, which saved me time. Since the assembly of acoustic levitron took me no more than 5 minutes. I made the connections with the dupont wire kit.
Description of sketch Arduino
The code is nothing special. It all comes down to setting the timer and jerking the D Arduino port. To do this, put Timer1 in reset mode at coincidence (CTC) and now, when the values of the account register TCNT1 coincide with the specified number in the comparison register OCR1A, an interrupt will be triggered, in the processor of which the entire port D will be inverted. After that, the counting register will be reset and after exiting The processor of the invoice process will start on a new one.
The value of the OCR1A register that we need is calculated as follows: since the divider in the TCCR1B register is turned off, we take the clock frequency of 16,000,000 Hz and divide by the desired interrupt frequency 80,000 Hz, as a result we get the number 200, this will be our value for register OCR1A.
Why 80 kHz, not 40 kHz, you ask? Because the period in the handler is formed in two interrupt operations. During the first operation, the outputs form D3 = 0 and D4 = 1, and in the second, D3 = 1 and D4 = 0.
Code for Arduino
volatile uint8_t portD3_D4 = 8; // D3 D4 void setup() { pinMode(3, OUTPUT); pinMode(4, OUTPUT); // Timer1 TCNT1 = 0; TCCR1A = 0; TCCR1B = 0; OCR1A = 199; // 16 / 80 = 200 TCCR1B = (1 << WGM12)|(1 << CS10); // CTC, TIMSK1 |= (1 << OCIE1A); // } void loop () {} ISR (TIMER1_COMPA_vect) // { PORTD = portD3_D4; // portD3_D4 = 255-portD3_D4;// } Source: https://habr.com/ru/post/461527/
All Articles