Not moon rovers and no jokers. What do we know about robots in Fukushima
One of the hardest man-made disasters in human history occurred on April 26, 1986. And then almost repeated on March 12, 2011. As you might have guessed, we are talking about accidents at the Chernobyl nuclear power plant in the USSR and at the Fukushima-1 nuclear power plant in Japan. The series "Chernobyl", filmed by HBO, rekindled interest in the history of the Chernobyl accident and recalled how difficult it was to stop the release of radionuclides from the destroyed reactor into the atmosphere. Separately there it was said about the unsuccessful use of robots and the forced resort to the help of people. Japan conducts numerous experiments with a variety of robots that can delay the need to attract people to eliminate.
The incidents at the Chernobyl nuclear power plant and Fukushima have different causes and different chronicles of events, but the common thing is that the vast area around the stations is contaminated, which makes long-term safe living on it impossible, and there is no talk about the complete clearing of the power units. In both cases, mankind was not ready to deal with the consequences - hundreds of thousands of people in the USSR worked on the decontamination of the exclusion zone and the construction of a protective sarcophagus over the reactor. In Japan, went the other way.
Help: exposure rate
The phrase about the radiation background from the Chernobyl series has managed to become a meme on the foreign Internet: “3.6 X-rays is not good, but it’s not terrible either.” Indeed, is it worth being afraid of these 3.6 x-rays per hour, or is it really not a terrible background? To better understand the measurements with Fukushima, given in the post below, you must first deal with the scale of doses and their effects on the body.
')
Well-known to Russians, x-ray (P) is an outdated unit for measuring background radiation, not part of the SI system. Now instead it is used Sievert (Sv). Simply put, 1 Sv is equal to 100 R. That is, 3.6 R / h is 0.036 Sv / h or 36 mSv / h. In Russia, at some research institutes, you can find a board with the current background, measured in x-rays. On average, our urban background fluctuates at the level of 12-20 μR / h or 0.12-0.2 μSv / h. From a natural radiation background on our planet, a person receives a dose of about 2.4 mSv per year (depending on the country and height above sea level). This radiation comes from space, comes from the soil, water, is present in the air, thanks to gas radon.
And now a small table with the doses we receive during our life (the one-time radiation indicated below is the receipt of the corresponding dose in the period up to 4 days):


Let's return to the 3.6 R / h mentioned in the series. 0.036 Sv / h (36 mSv / h) is really not a terrible background in the event of an accident, for the development of mild radiation sickness it takes more than a day to stay in the danger zone, and repair work within a few hours is completely safe and acceptable. And now let us recall how a little later they said in the series that the background at the reactor is not 3.6, but 15,000 X-rays (150 Sv / h). Four minutes with such a background entail the inevitable death. After two minutes, only the fastest qualified medical aid can give a chance for salvation, and 25 seconds will be enough to get radiation sickness.
Toshiba Fukushima
The cooperation of Toshiba and the Tokyo Energy Company (TEPCO) began at the construction stage of the Fukushima-1 nuclear power plant. Toshiba was responsible for the construction of BWR-type reactor installations for the third and fifth power units of the plant, commissioned in 1976 and 1978, respectively. Among the advantages of BWRs are lower vapor pressure in the primary circuit than, for example, the Soviet WWER, and lower operating temperatures. The disadvantages include the complexity of manufacturing, the need for a very large package, the complexity of control and radiolysis in fuel elements, leading to the production of explosive hydrogen.
If the accident at the Chernobyl nuclear power plant led to the lack of an RBMK reactor design, which made itself felt during violations during testing, then two natural disasters led to the incident at Fukushima. An earthquake with a record magnitude of 9.0-9.1 led to the shutdown of reactors, and the subsequent tsunami flooded the territory of Fukushima-1 and emergency generators feeding the reactor cooling pumps. The station's reactors, which even in the event of an emergency stop do not immediately cool down, remained without cold water flow, which caused it to boil off, an increase in steam pressure and temperature inside, the formation of hydrogen due to the contact of steam with zirconium in a fuel rod (vapor-zirconium reaction) and its subsequent explosion . In the first, second and third power units, the reactor core melted and nuclear fuel leaked. At Fukushima, radionuclides leak into the ocean along with cooling water, at the Chernobyl nuclear power plant during a fire, they hit the atmosphere and spread throughout Europe.

Chronicle of what happened on the three units. The fourth power unit also suffered, but there was no nuclear fuel in its reactor, so only a fire occurred. Source: Roulex_45 / Wikimedia
To eliminate the Fukushima accident, it is necessary to draw up a damage map, find molten fuel and places of its leakage, remove spent nuclear fuel from reactors and storage pools, disassemble debris - that is, do tremendous work under an equally huge radiation background. Now robots and remote-controlled vehicles are engaged in this work at the FNPP - sending people to the accident zone is too dangerous, in some places the station can kill a person in just a few minutes.
Toshiba, together with the International Research Institute for the Decommissioning of Nuclear Reactors (IRID), is developing robots for specific tasks - the inspection of Fukushima power units and decontamination (cleaning) of premises from radioactive contamination. We will talk about several of the most prominent Toshiba robots, who made their small but important contribution to the cause of eliminating the consequences of the accident.
By the way, there is an erroneous opinion that Fukushima did not take into account the valuable experience of Chernobyl in liquidation. This is fundamentally wrong. Immediately after the accident, a group of Japanese-Russian experts in the field of nuclear energy was created to deal with the aftermath of the Fukushima-1 accident, including Larion Aleksandrovich Lebedev - a direct participant in the work at the Chernobyl Nuclear Power Plant since the summer of 1986, who was a member of the team of physicists of the Moscow Engineering and Physics Institute, who made a huge contribution in the study of the radiation situation and the construction of the sarcophagus. After the accident in Japan, Larion Lebedev improved the technology of extracting tritium from radioactive water, which made it possible to start treating huge amounts of heavy water left over after cooling the destroyed reactors. On behalf of the Japanese government, Larion Alexandrovich was awarded the Order of the Rising Sun, awarded for military and civil merit.
Four Legged Scout
The first Toshiba robot to be on the FAES was a nameless four-legged drone, the development of which began immediately after the accident. His mission, like all robots launched to the power plant in the early years, was radiation reconnaissance and damage assessment within power units.
A dosimeter and six cameras were installed on the chassis to inspect the station’s premises. The protected electronics was designed to work with radiation of 100 mSv / h throughout the year (with a 10-hour working day) and with a much larger background for short intervals. True, one battery charge lasted only for 2 hours of autonomous existence. The robot was moving at a speed of about 1 km / h, which is enough when examining a destroyed power unit. Control was carried out by radio with redundancy in case of interference.
At the bottom of the device was attached a small reconnaissance drone, which could detach from its carrier and creep into narrow places where the tall robot could not pass. It was supposed to be used to search for leakage of cooling water under the piping of the reactor.
It’s impossible to say that high hopes were pinned on the robot: even at the demonstration stage, the journalists pointed to the machine’s slowness - it took up to one minute to climb each step of the ladder, and when putting the foot on an unstable surface, the robot could roll over on its side.
However, the first experimental Toshiba mechanism for the FAES still managed to penetrate the building of the second power unit and conduct a little reconnaissance. TEPCO published a report on how December 11, 2012 the robot took pictures of one of the tubes, confirming the absence of leaks. In March 2013, he went inside five more times. But soon, while trying to further inspect the premises, the robot lost its balance on the stairs and fell on its side. Due to the absence of a turning mechanism, the four-legged reconnaissance intelligence officer remained in the second block.
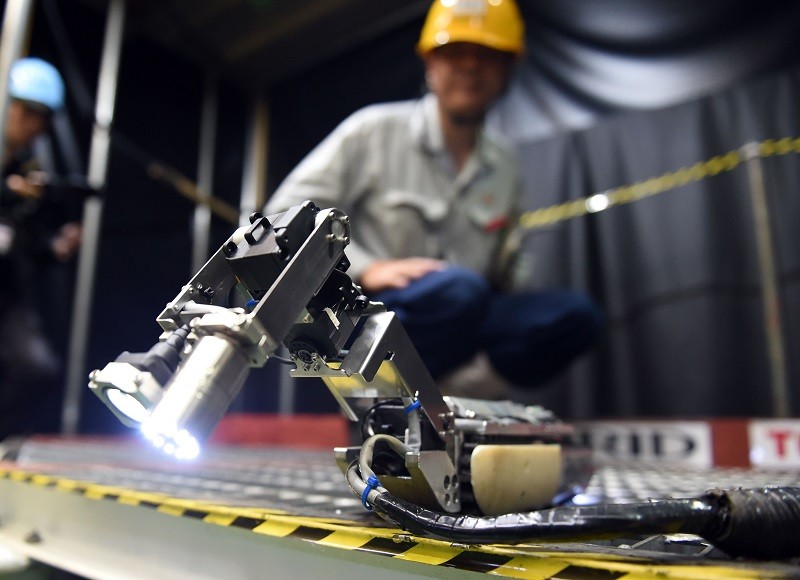
Foldable Explorer Scorpion
The next company robot, which took into account all the shortcomings of the previous model, was Toshiba Scorpion, so named for its shape (the title photo). It was developed for a very difficult task - to study the bottom of the reactor and search for fuel rods, and this mission involves working with a huge radiation background. Scorpion was spared from the legs, which were replaced by caterpillars, and for compactness the design was made folding - the machine was supposed to be thrown into the reactor through the passages for loading fuel rods. In the operating mode, the robot as if raises its tail-manipulator, moving along three axes in the manner of a scorpion, at the end of which, instead of a sting, a camera and illumination LEDs are fitted. Another camera is installed at the front and always looks forward.
Scorpion is controlled by the operator through a cable, so there are no problems with power and signal transmission. In addition, the robot is made returned, it should not remain in the reactor after the transfer of evidence. Tilting him is not scary, the “tail” with the camera returns the robot to its normal position.
For several years, the Scorpion was being finalized in order to finally get inside the FNPP - over time, he received a small water cannon for clearing the way, a bucket and a cutter for working with corium. In February 2017, the robot went to the reactor, where he measured the background and shot a video. The dosimeter showed an impressive 210 Sv / h (21,000 P). In the next room, where the workers were loading the robot into the pipe, the background was 6 mSv / h.
ROV: small submarine

A small submarine with video cameras, which are high hopes. Source: Toshiba
Remotely controlled underwater vehicle, or abbreviated as ROV, is the first Toshiba floating robot built to study the reactor of the third power unit, the lower part of which is hidden under a six-meter-wide water column. This small submarine with dimensions of 30 x 13 cm and a mass of 2 kg carries two cameras and lights, is controlled by cable and can move under water in any direction with high accuracy. The device is controlled by the operator, and the signal and power are fed through a long cable. To prevent the wire from getting tangled and not caught on the debris, Toshiba developed a special coating with minimal friction, and installed two powerful engines on the ROV itself so that the robot could safely pull the cable along.
By the way, the ROV diameter of 14 cm was due to the narrow inlet to the reactor building of the third power unit, so Toshiba engineers had to work hard to fit electronics, protection and motors into such a compact case. At the end of a two-month intensive training course for operators, Toshiba ROV went to the FAES. The robot visited the reactor on July 19, 21 and 22, 2017 and successfully inspected the destroyed entrails.
Magnetic SC-ROV
Another difficult-to-reach place in which water with radionuclides accumulated was toroidal pressure-relief chambers located below the reactor. It was necessary to send a robot to search for leaks under the camera, but the matter was complicated by the fact that the containment was flooded - the robot was required to inspect the pipes immersed in muddy water. Floating devices for this did not fit, a probe was needed that would have fixed on the pipe and could go along it without sliding even at a large angle.
How to fix the robot on a steel pipe so that it does not roll? With the help of magnets. The Toshiba SC-ROV device was created specifically for the parameters of the pressure relief chamber. It is a chassis with wheels of powerful neodymium magnets. With the help of four cameras and a marker, the operator can move around the surface of the pipe submerged under the water and mark the holes found.
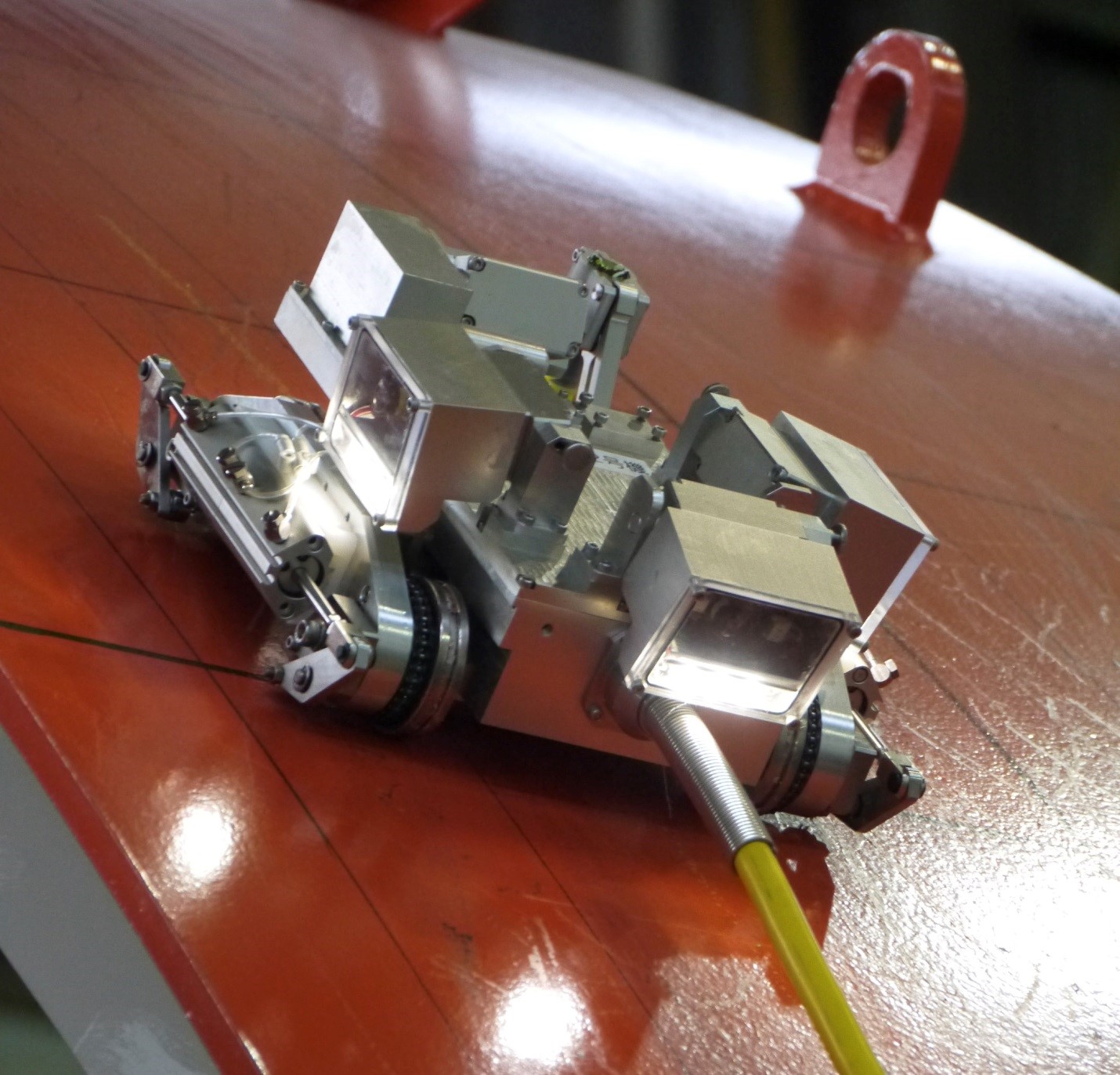
SC-ROV perfectly held the magnets by the inclined surface during the demonstration. But the real conditions were much tougher. Source: IRID
According to the results of the work of SC-ROV in 2014, no leaks were found, but there were problems in the operation of the device. First, because of the turbidity of the water, the visibility range did not exceed 30-35 cm, which significantly hampered the search. Secondly, due to some defects in the pipe surface, the robot still slid off when it was tilted to 120 °.
Corium Search Camera
Previous search missions showed a depressing picture - the nuclear fuel in the reactor of the second power unit went outside the reactor vessel. Photos of the melted grate at the bottom of the containment clearly made it clear that the fuel is already somewhere at the bottom. But did the protective sheath hold it or did the corium sink into the ground? It was necessary to send a new robot to the “inferno” of the former reactor to an incredibly fading fuel.

The molten lattice inside the containment of the second reactor is exactly above the drive of the control and protection system rods. Source: TEPCO
Crawler robots work only on a flat floor, and a submarine needs water. Toshiba invented a remote-controlled camera mounted on the end of a five-meter telescopic tube. Regardless of the angle of entry of the pipe into the containment, the chamber takes a strictly vertical position - the main unit is held by the control cable, that is, the camera is “hanging on the wire”. Its lens rotates 360 ° horizontally and 120 ° vertically. In fact, there are two cameras on the device at once - directly working and camera for orientation. In addition to the lenses, a backlight, a dosimeter and a thermometer are installed on the unit. The device maintains an absorbed dose of up to 1000 grays.
The first version of the camera worked on Fukushima in January 2018, where it successfully found corium and measured the background, which amounted to 530 Sv / h (53,000 X-rays). But this work has not ended - it took to take samples for analysis. In the updated version of the device, the backlight was enhanced and a sliding arm was added. In February 2019, the Toshiba remote-controlled camera first received a sample of corium from the second power unit.
Machine cleaner
The premises of the power units will sooner or later have to be deactivated, but first you need to make a map of pollution. The results of numerous research missions showed a very bleak picture: contrary to expectations, most radionuclides settled not on the floor or on the walls, but on top-level elements, such as pipelines and ventilation — they accounted for up to 70% of the total radiation. Decontaminating the floor is relatively simple, the walls are a bit more complicated, but how do you get to the dirt on the ceiling and in the intricacies of pipes, given that the height of the ceilings on the first floor is 7-8 meters?

Toshiba's “radionuclide cleaner” - rises 8 meters in height and diligently scrapes walls. Source: IRID
Toshiba has developed a robot operating a cannon with dry ice - icing powder covers the surface, binds radioactive particles, and the robot scrapes it and sucks it into itself. The mechanism raises the design to a height of 8 meters. Since this is another remote-controlled machine, its operator receives a picture from as many as 22 cameras simultaneously. The machine started cleaning power units in January 2016. Its performance is low, but even a small contribution to the decontamination of the station is valuable.
Help but not solution
33 years have passed since the accident at the Chernobyl nuclear power plant, since technology has made a tremendous breakthrough. Now in the aftermath of the consequences of Fukushima dozens of robots and types of remote-controlled construction equipment are involved. The TEPCO website has a lot of reports, the data from which in general form a very sad picture: there are robots and there are technologies, but all of them have not come close to the effectiveness of the work of the Chernobyl NPP liquidators. The development and testing of robots takes months and years, and the result of their work is the promotion of a dozen meters, the collection of dosimetric data, muddy video and the frequent termination of missions due to unforeseen problems.
Every robot in Fukushima is saved people, and every human life is worth developing robots. But the current plans of TEPCO make it clear that according to the most modest estimates, the elimination of the consequences of the accident will take at least 30-40 years. And this only confirms the heroism and scale of the feat of the Soviet liquidators of Chernobyl.
Source: https://habr.com/ru/post/457752/
All Articles