Bumble Robop Bead - the first test flight inside the ISS

An autonomous flying wireless small-sized cube robot “Bumble” of the Astrobee project began to undergo flight tests onboard the ISS.
2019 is the year of robots on the ISS. FEDOR has not arrived yet, but the combat tests of the Astrobee project robots have already begun.

')
Two robots are already at the station - this is Bumble and Honey, and in July, the third robot, Queen, is expected to arrive on the ISS.

Their names are not so easily associated with miniature and have a "bee" disposition.
These are specially designed small-autonomous robots designed and created by NASA at the Ames research center , which are designed to work in zero gravity inside the MKS modules. They should, like bees, take on part of the routine space tasks and free the ISS crew from simple but frequent actions.
Thus, the Astrobee project is a free-flying system from a complex of robots, the main purpose of which is to test small-sized automated platforms under weightless conditions with the acquisition and analysis of data in real conditions and the possibility of further upgrading and improving the software and functions of robots to perform current and new tasks on the ISS.


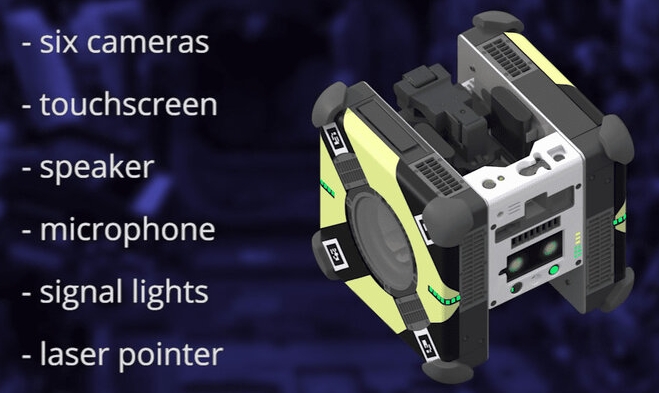
Characteristics of the Astrobee project robots:
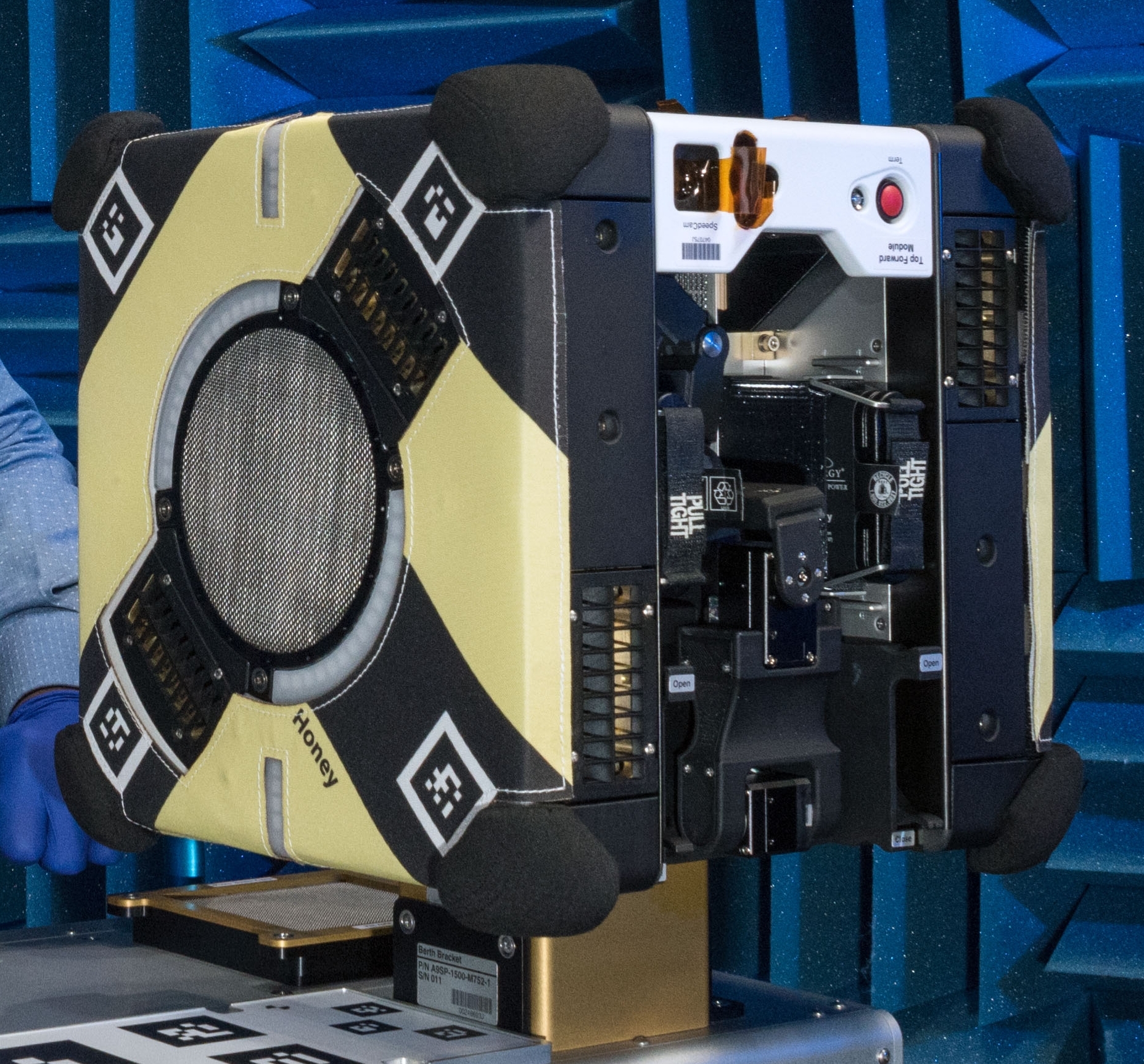
- the size of one robot - 30x30x30 centimeters (1x1x1 foot);
- the body of the robot is covered with soft material to minimize possible damage if you strike any object or element on the ISS;
- part of the edges of the robot is designed to work with small loads, there is even a system for grabbing and fixing objects with a folding manipulator so that the robot can hold and safely move an object from one end of the station to the other, the robot can also fix its position with this grab need, clinging to the handrails or other elements of the ISS;

- robots have a separate external charging station, which serves to charge the batteries of the robots and to retrieve telemetry data;

- robots can move only inside the ISS in zero gravity conditions only if there is an atmosphere in the working module with the robot, their reactive system uses station air for movement;
- each robot has its own computerized control system for the onboard fan system, which allows air to be captured and ejected through 12 nozzles in the direction opposite to the intended motion vector, which allows the robot to move in any direction and fly freely on the ISS under weightless conditions;
- the robot's fans are located behind a special protective wall on the edges of its cube;
- the computer system of the robot works on Linux, and the module that is responsible for working with objects and their movement works on the basis of Android, which allows you to quickly expand the functionality of the system if necessary;
- link to the githaba repository with Astrobee software.
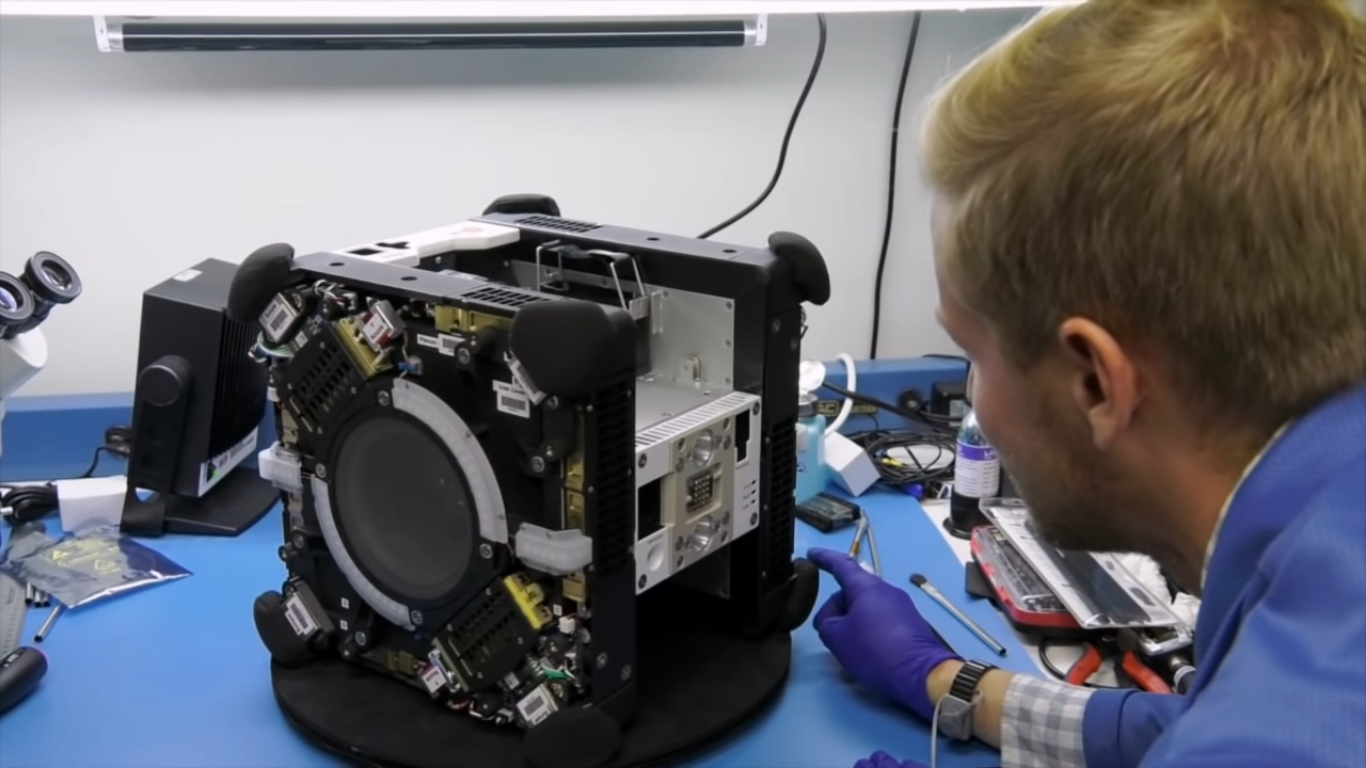
- each robot has on board: a main navigation camera with a field of view of 116 °, several HD cameras with autofocus that can transmit information from the ISS to Earth in real time, and its onboard camera CamBoard Pico Flexx allows the robot to recognize objects and obstacles from a distance of four meters;
- each robot has an optical detector to determine the speed and emergency execution of the stop procedure;
- modes of operation of robots: autonomous, they can also be controlled remotely, it is safe to pick up, put on charge if necessary, turn them off.
Functions of robots of the Astrobee project:
- the main task of the robots is to assist the crew on the ISS, to perform a number of routine tasks so that the staff can focus on more important tasks (carrying out experiments and various studies);
- carry out an inventory, document experiments, check the ISS system and move cargo, objects and tools through the narrow corridors of the station and between modules;

- perform maintenance of the MKS modules when there are no personnel in them or in places where the crew cannot reach quickly;
- to monitor the operation of the systems and sensors of the ISS;
- monitor air quality, analyze the level of carbon dioxide concentration in different locations of the ISS as often as necessary.
The story of the appearance of the Astrobee robots on the ISS:
- the charging station was delivered onboard the ISS on November 17, 2018 and was installed on February 15, 2019;


ABB circuit breaker use:

- “Bumble” and “Honey” robots were launched from Earth to the ISS on April 17, 2019;

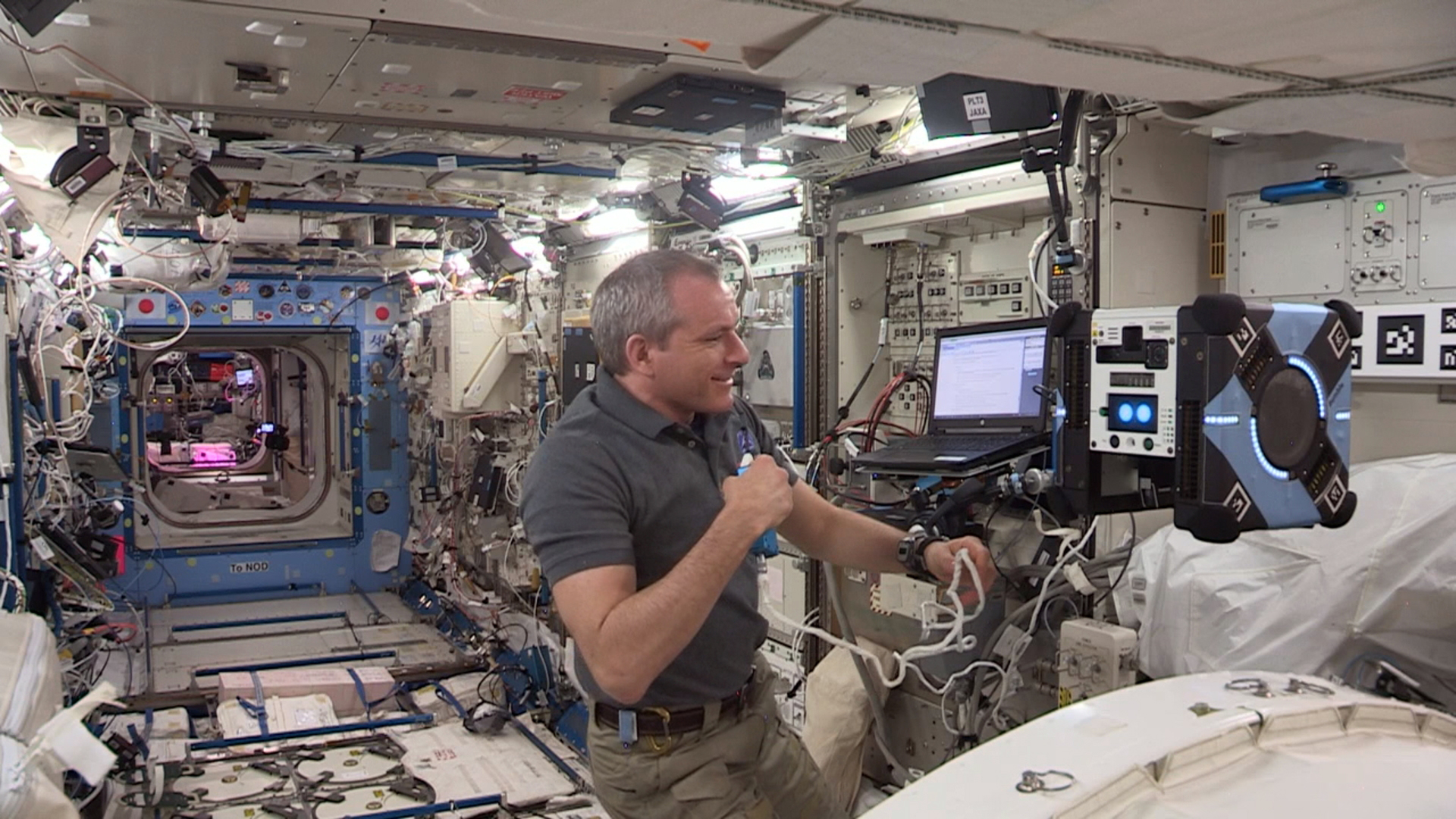
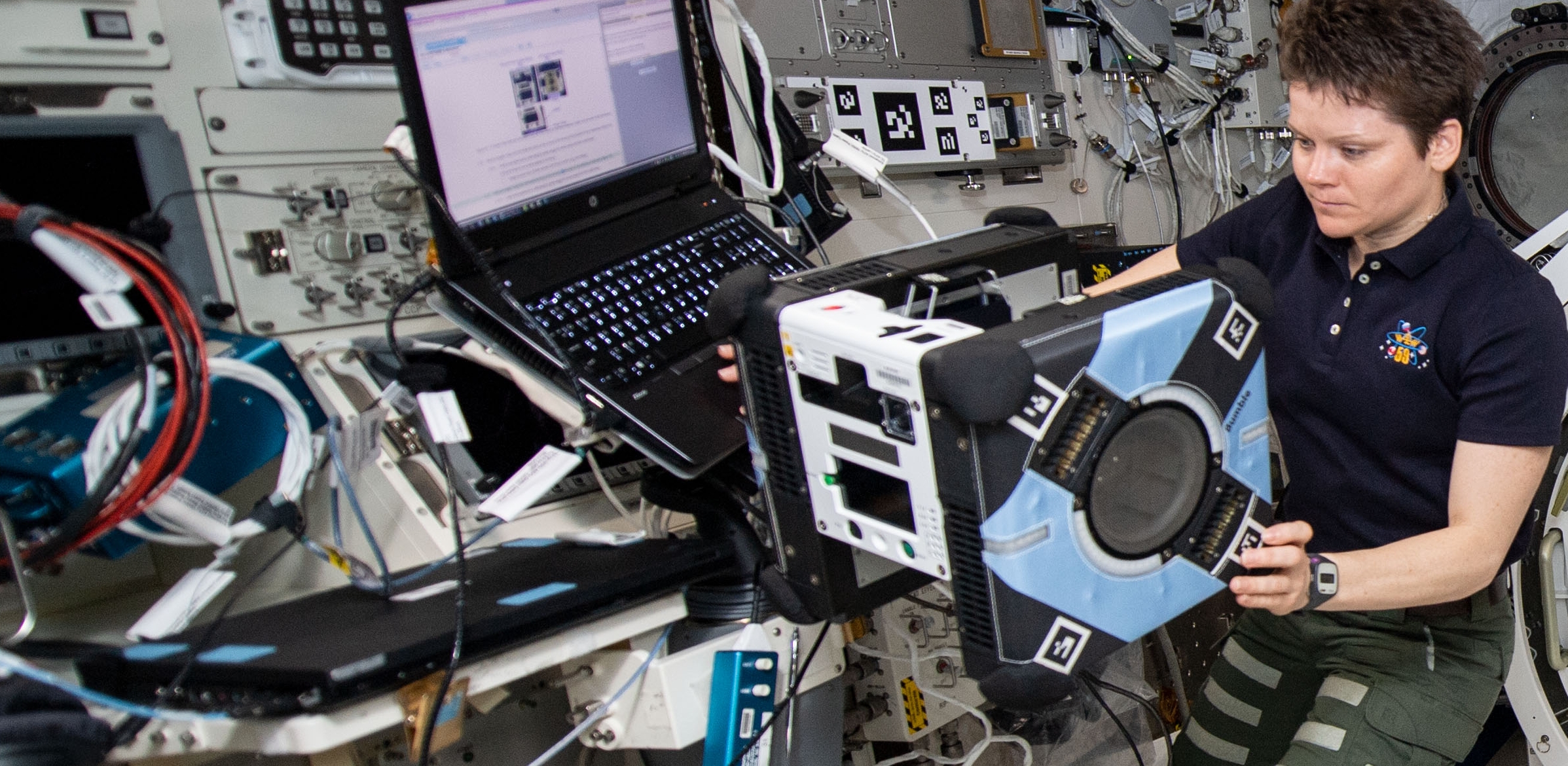
- On April 30, 2019, Anne McClain (astronaut MKS) unpacked the box with the robot “Bumble” and with the support of the NASA development team of the Astrobee project, located in the Ames Research Center, checked all auxiliary systems of the robot - avionics, video cameras, propulsion system, and transferring data and charging its batteries;





- On June 14, 2019, flight tests began with the Bumble robot;
- July 2019 - the third Queen robot is expected to arrive on the ISS.
About the first flight of the “Bumble” robot of the Astrobee project on the ISS:
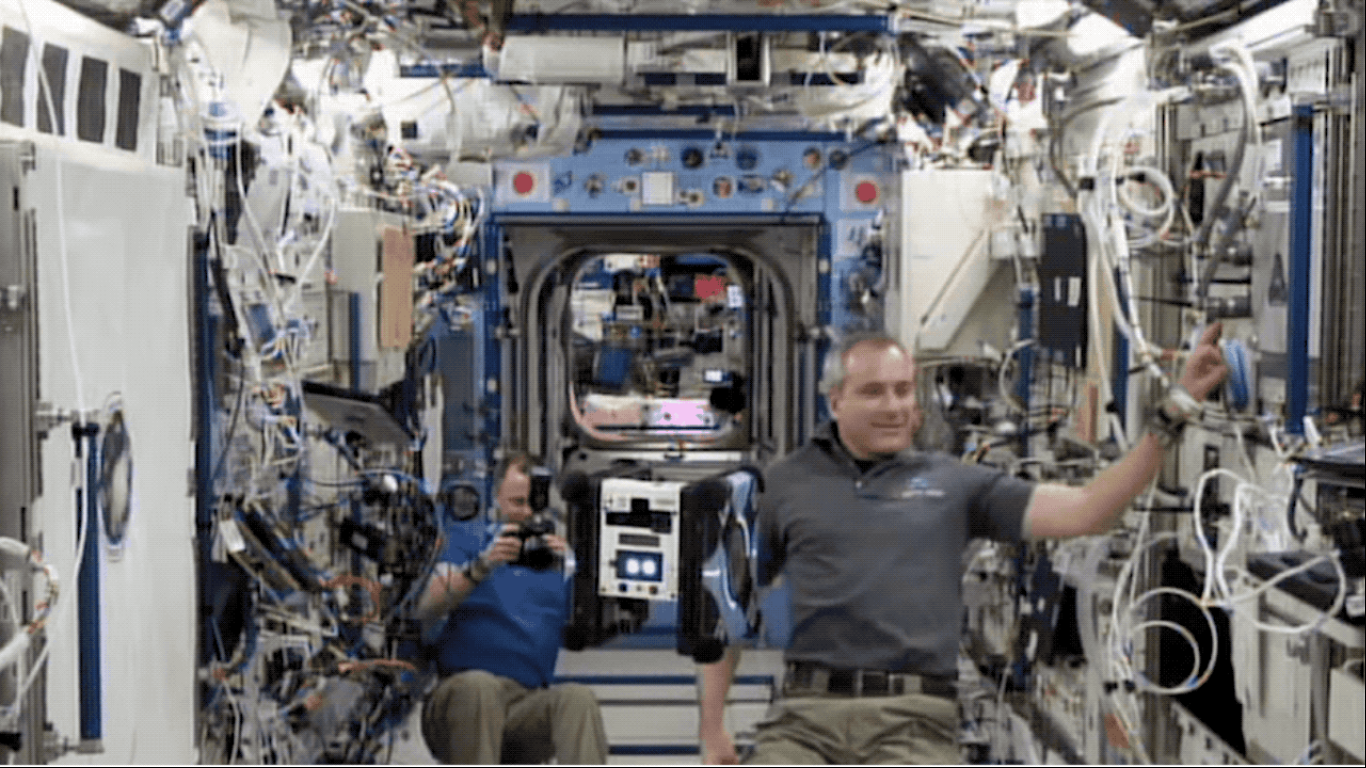
On June 14, 2019, the robot “Bumble” became the first robot of the Astrobee project, which made the first test flight in zero gravity.
Before the first flight of the “Bumble” robot, the Astrobee project team at the Ames research center remotely checked all its onboard systems, a confirmation was received from Earth that the robot can identify its location and is ready to navigate inside the ISS.
Astronaut of the Canadian Space Agency David Saint-Jacques provided practical assistance in conducting pre-flight tests by manually moving the “Bumble” robot inside the scientific laboratory of the ISS in the “Kibo” module to allow the robot navigation system to perform calibration in a new environment after the fact.
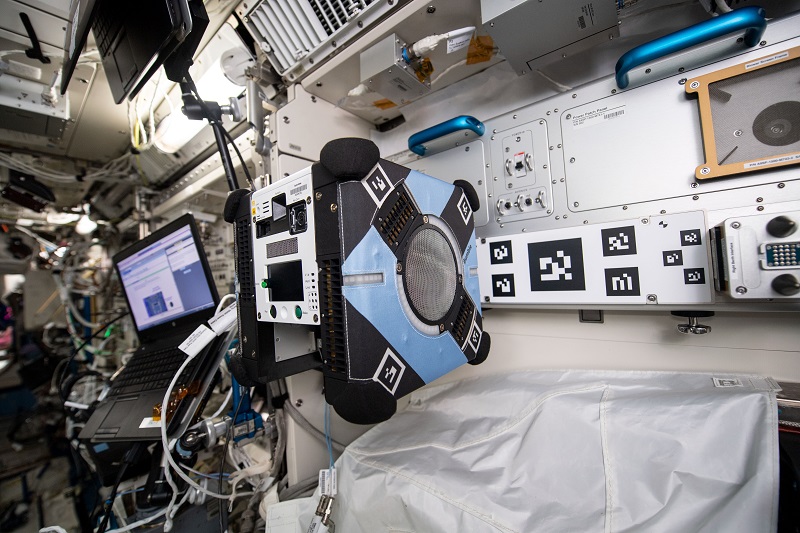
The navigation system of the Bumble robot uses standard cameras to monitor and monitor the external space and then compares the images with the MKS interior map previously loaded into the robot.

The robots of the Astrobe project are designed to move in any direction and rotate around their axes in space aboard the ISS.
Then the testing of the work of the flight systems of the “Bumble” robot began in the automatic mode and in the controlled mode (remotely from the Earth).
During the first test flight of the “Bumble” robot, the operability of its main onboard components was tested and a complex of basic movements such as “flying 11.8 inches (30 centimeters) forward” or “turning 45 degrees to the right”, orientation in space was performed ISS and so on.

NASA plans to continue testing the flight capabilities of the Bumble robot using a series of increasingly complex maneuvers to determine how well its elements can work under weightless conditions and what adjustments should be made to the software for further use.
Based on the results of these flight tests, basic settings for the propulsion system of the project robots of the Astrobe project will be created, with the help of which it is planned to help the Bumble, Honey and Queen robots to prepare themselves to take on the role of new crew members of the ISS.
The first flight of the robot "Bumble"


Source: https://habr.com/ru/post/457232/
All Articles