Touch mini switch co with glass panel on nRF52832
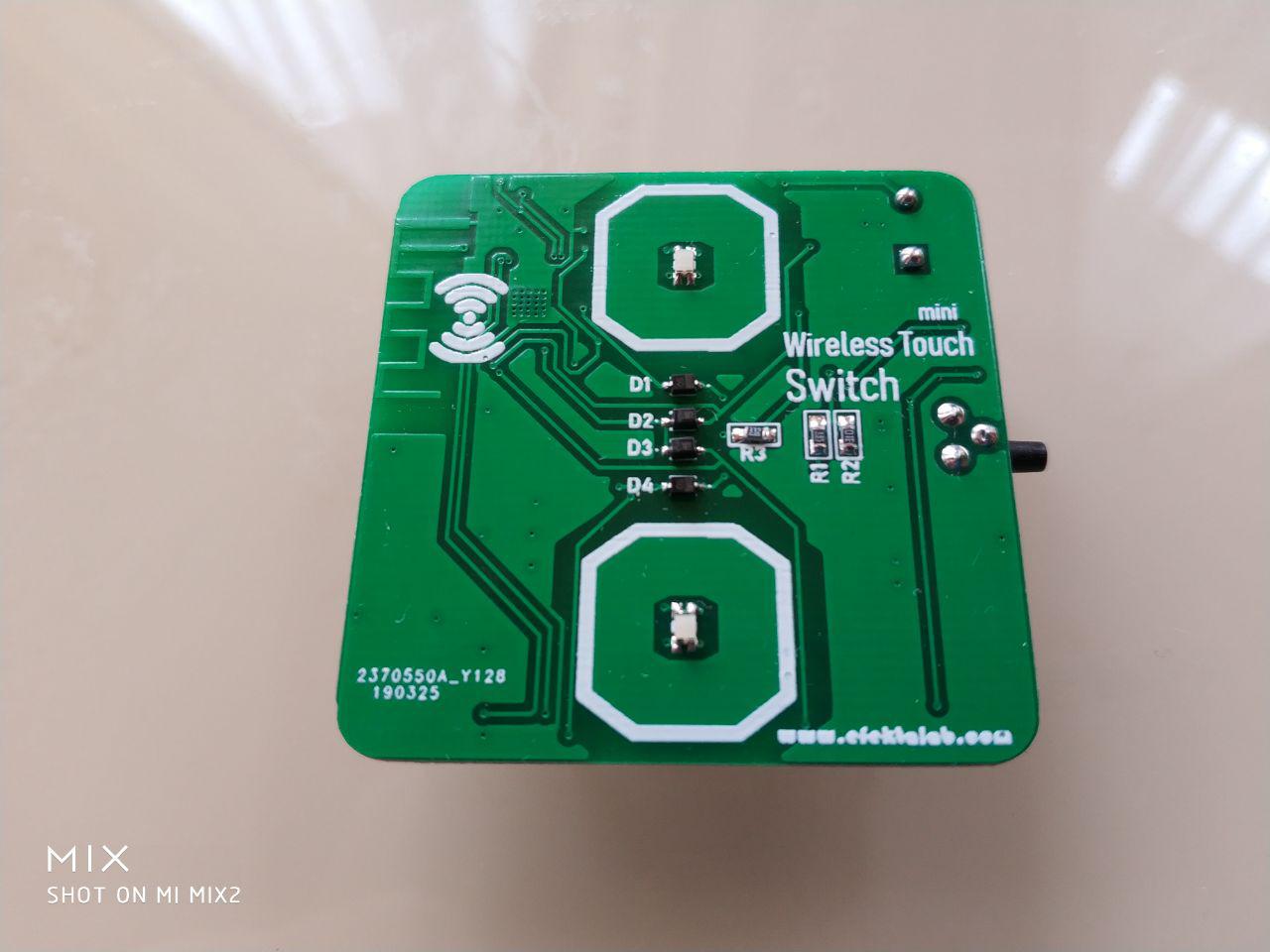
In today's article I want to share with you a new project. This time it is a touch switch with a glass panel. The device is compact, measuring 42x42mm (standard glass panel has dimensions 80x80mm). The history of this device began long ago, about a year ago.

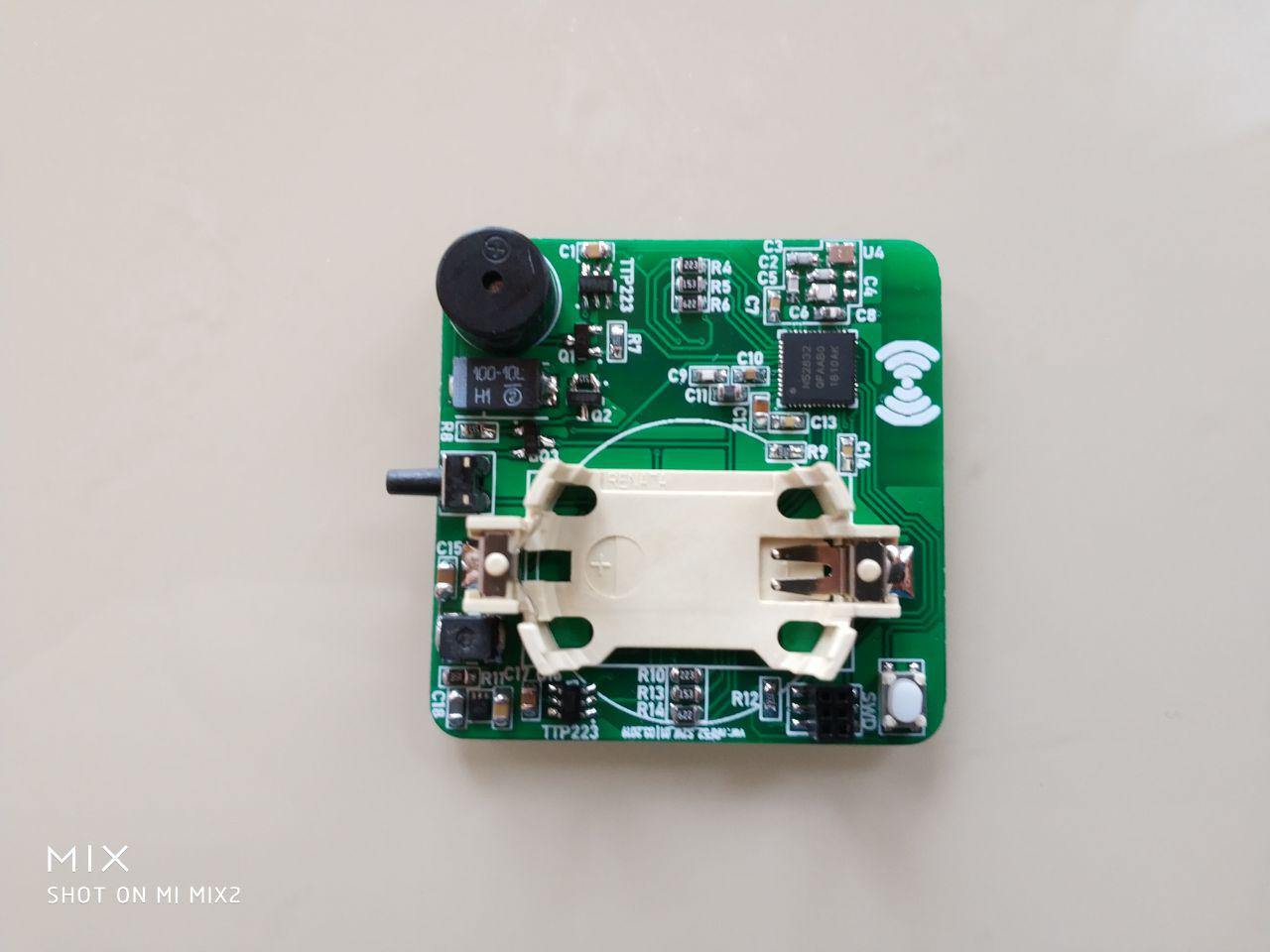
The first options were on the atmega328 microcontroller, but in the end it all ended with the nRF52832 microcontroller.
The sensor part of the device runs on TTP223 chips. Both sensors serve one interrupt. Powered by a CR2477 battery, through a step-up converter on a chip TPS610981 | Datashit .
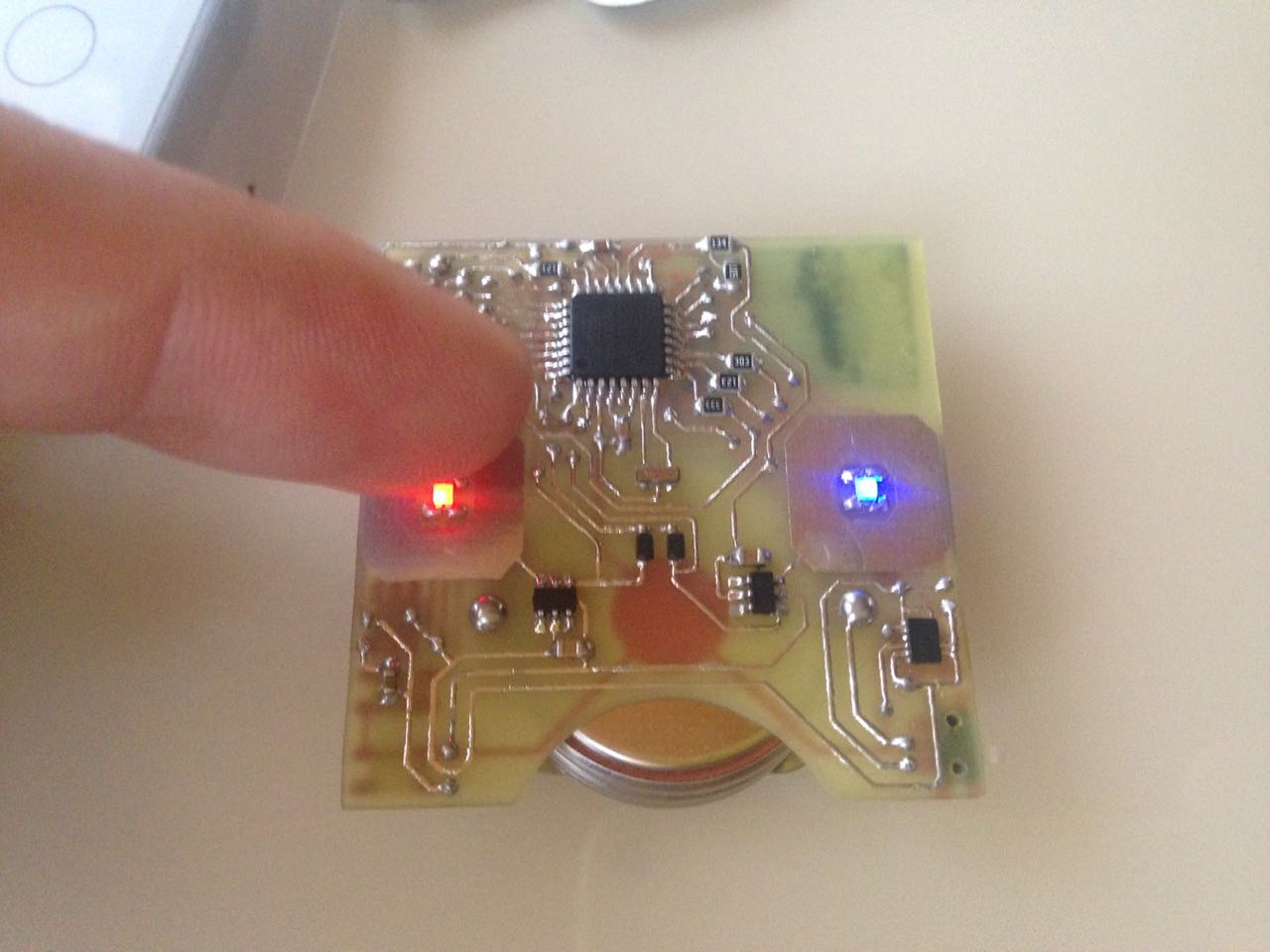
The device has a power-off circuit for field-effect transistors. After pressing the button, the microcontroller intercepts the power management itself, and then the button can be used for service modes (in my case it is pairing with other devices, turning off the power and resetting to factory settings (factory reset)).
There are 2 rgb LEDs for status indications and service modes. Also added a piezo emitter to simulate a click when you touch the touch buttons and sound indication of service modes. LEDs and piezo emitters can be turned on and off by the user. This is done through the smart home controller, sending commands to the technical sensors, the user also has the ability to change the battery charge intervals and the signal level through the smart home controller. In my case, this is MAJORDOMO .
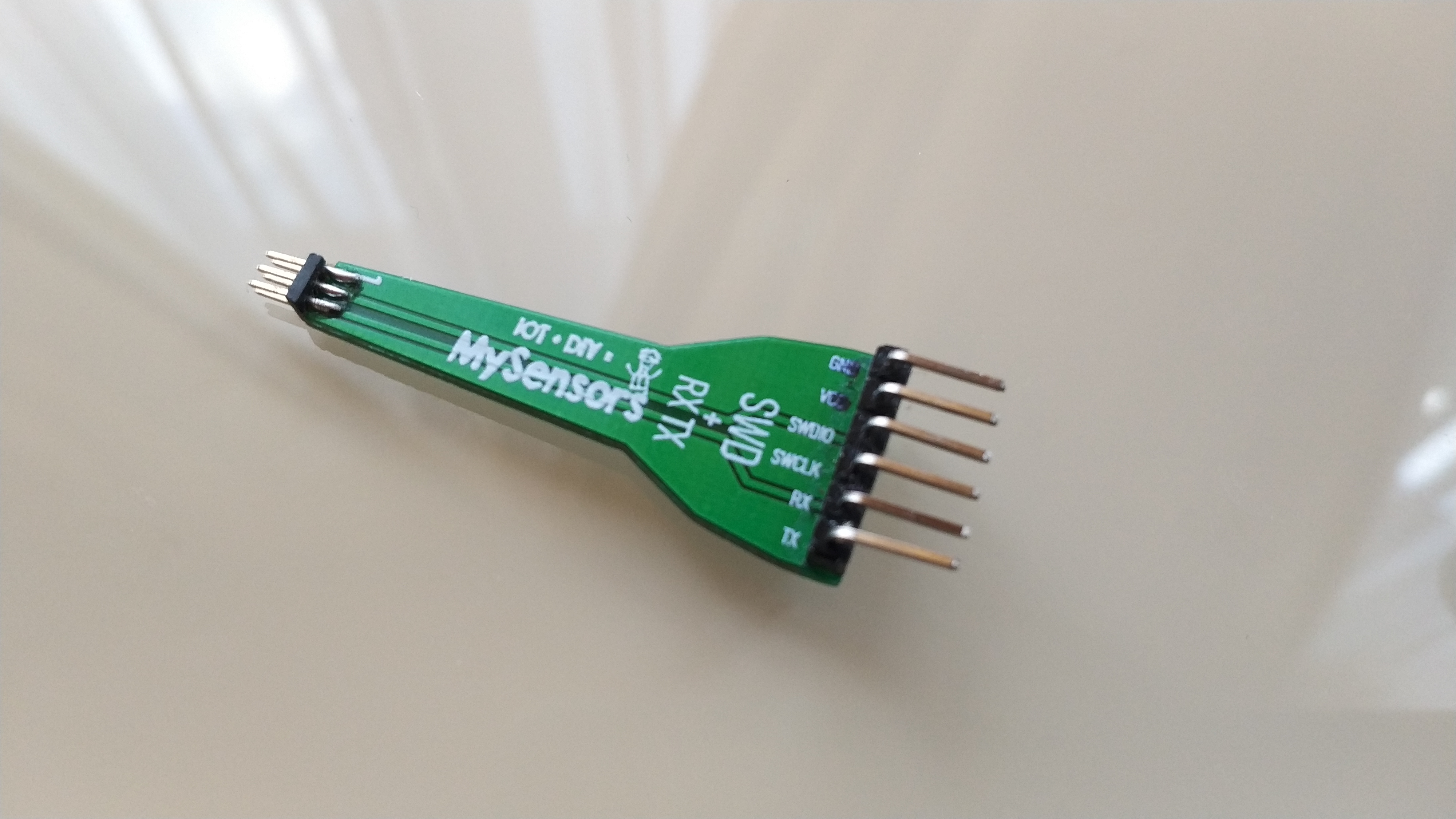
The consumption in the transfer mode is 7 mA (250kbit, 10 ms), the sleep consumption is 40 μA, and the off-power consumption is less than 1 μA (= the consumption of the boost converter in the “idle” mode). Derived rx, tx, swd plug for programming. A miniature 2x3p plug with 1.27 steps is used. A special adapter has been made for programming.
As always, at the heart of the device is the MySensors protocol. This touch switch is planned to be used in the roller blind control system. But in general, the application is limited only by your imagination. For example, a son (7 years old) has already made 3 orders on the switch version: to turn on and off the light in the bathroom toilet (it will be mounted low from the floor), to turn on the light in the long and dark corridor when traveling to the bathroom toilet and another one bedside, to quickly turn on the light in his room so that the monsters scattered.


The case was traditionally printed on an SLA printer, the device is miniature, the case is small, the use of this printing technology is justified.



Magnets are glued into the case and the battery cover.
Vidosiki with tests of this device:
For those who wish to repeat:
Code of the test program of the switch in the roller blind control system for the Arduino IDE
int8_t timer_status = 0; boolean sens_flag1 = 0; boolean sens_flag2 = 0; boolean switch_a = 0; boolean switch_b = 0; uint16_t temp; float vcc; int battery; int old_battery; uint32_t oldmillis; uint32_t newmillis; uint32_t interrupt_time; uint32_t SLEEP_TIME = 7000; uint32_t SLEEP_TIME_W; uint32_t SLEEP_TIME_W2; int NrfRSSI; uint16_t NrfRSSI2; boolean wait_off; #define MY_DEBUG #define MY_RADIO_NRF5_ESB #define MY_PASSIVE_NODE #define MY_NODE_ID 120 #define MY_PARENT_NODE_ID 0 #define MY_PARENT_NODE_IS_STATIC #define MY_TRANSPORT_UPLINK_CHECK_DISABLED #define POWER_CHILD_ID 110 #define UP_POWER_SWITCH_ID 1 #define DOWN_POWER_SWITCH_ID 2 #define CHILD_ID_nRF52_RSSI_RX 3 #define BAT_COOF 0.0092957746478873 #define BAT_MIN 200 #define BAT_MAX 290 #include <MySensors.h> MyMessage upMsg(UP_POWER_SWITCH_ID, V_STATUS); MyMessage downMsg(DOWN_POWER_SWITCH_ID, V_STATUS); MyMessage powerMsg(POWER_CHILD_ID, V_VAR1); MyMessage msgRF52RssiReceiv(CHILD_ID_nRF52_RSSI_RX, V_VAR1); void preHwInit() { //delay(1000); pinMode(31, OUTPUT); digitalWrite(31, HIGH); delay(3000); pinMode(3, INPUT); pinMode(25, OUTPUT); pinMode(26, OUTPUT); pinMode(27, OUTPUT); pinMode(6, OUTPUT); pinMode(7, OUTPUT); pinMode(8, OUTPUT); pinMode(28, OUTPUT); // bizzer pinMode(2, INPUT); pinMode(9, INPUT); pinMode(10, INPUT); pinMode(29, INPUT); digitalWrite(28, LOW); // off bizzer digitalWrite(27, HIGH); digitalWrite(26, HIGH); digitalWrite(25, HIGH); digitalWrite(6, HIGH); digitalWrite(7, HIGH); digitalWrite(8, HIGH); } void before() { //digitalWrite(31, HIGH); NRF_POWER->DCDCEN = 1; //NRF_UART0->ENABLE = 0; analogReadResolution(12); disableNfc(); turnOffAdc(); //wait(2000); digitalWrite(25, LOW); digitalWrite(6, LOW); wait(200); digitalWrite(25, HIGH); digitalWrite(6, HIGH); wait(100); playSound0(); wait(100); digitalWrite(25, LOW); digitalWrite(6, LOW); wait(200); digitalWrite(25, HIGH); digitalWrite(6, HIGH); wait(3000); digitalWrite(27, LOW); digitalWrite(8, LOW); wait(200); digitalWrite(27, HIGH); digitalWrite(8, HIGH); wait(400); digitalWrite(6, LOW); digitalWrite(25, LOW); wait(200); digitalWrite(6, HIGH); digitalWrite(25, HIGH); wait(400); digitalWrite(26, LOW); digitalWrite(7, LOW); wait(200); digitalWrite(26, HIGH); digitalWrite(7, HIGH); wait(1000); digitalWrite(26, LOW); digitalWrite(7, LOW); } void setup() { digitalWrite(26, HIGH); digitalWrite(7, HIGH); wait(50); playSound(); wait(2000); readBatLev(); wait(200); SLEEP_TIME_W = SLEEP_TIME; } void presentation() { sendSketchInfo("Power on|off Node", "1.0"); wait(100); present(POWER_CHILD_ID, S_CUSTOM, "BATTERY DATA"); wait(100); present(UP_POWER_SWITCH_ID, S_BINARY, "UP SWITCH"); wait(100); present(DOWN_POWER_SWITCH_ID, S_BINARY, "DOWN SWITCH"); } void loop() { if (sens_flag1 == 0 && sens_flag2 == 0) { if (switch_a == 0 && switch_b == 0) { timer_status = sleep(digitalPinToInterrupt(2), RISING, digitalPinToInterrupt(3), RISING, 3600000, false); wait_off = 1; } else { //oldmillis = millis(); timer_status = sleep(digitalPinToInterrupt(2), RISING, digitalPinToInterrupt(3), RISING, SLEEP_TIME_W, false); wait_off = 0; } } if (timer_status == 3) { wait(100); digitalWrite(27, LOW); digitalWrite(8, LOW); wait(2000); digitalWrite(27, HIGH); digitalWrite(8, HIGH); wait(100); digitalWrite(31, LOW); } if (timer_status == 2) { if (digitalRead(9) == HIGH && sens_flag1 == 0 && switch_b == 0) { sens_flag1 = 1; if (switch_a == 0) { oldmillis = millis(); SLEEP_TIME_W = SLEEP_TIME; switch_a = 1; send(upMsg.set(switch_a)); //wait(200); digitalWrite(6, LOW); wait(10); playSound1(); wait(20); playSound2(); wait(50); } else { switch_a = 0; send(upMsg.set(switch_a)); //wait(200); digitalWrite(6, HIGH); wait(10); playSound2(); wait(20); playSound1(); wait(50); } //sleep_not_pasible = 1; //digitalWrite(25, HIGH); //wait(100); } if (digitalRead(10) == HIGH && sens_flag2 == 0 && switch_a == 0) { sens_flag2 = 1; if (switch_b == 0) { oldmillis = millis(); SLEEP_TIME_W = SLEEP_TIME; switch_b = 1; send(downMsg.set(switch_b)); //wait(200); digitalWrite(25, LOW); wait(10); playSound1(); wait(20); playSound2(); wait(50); } else { switch_b = 0; send(downMsg.set(switch_b)); //wait(200); digitalWrite(25, HIGH); wait(10); playSound2(); wait(20); playSound1(); wait(50); } //sleep_not_pasible = 1; //digitalWrite(6, HIGH); //wait(100); } if (digitalRead(9) == LOW && sens_flag1 == 1) { sens_flag1 = 0; //digitalWrite(6, HIGH); //playSound2(); //wait(50); } if (digitalRead(10) == LOW && sens_flag2 == 1) { sens_flag2 = 0; //digitalWrite(25, HIGH); //playSound2(); //wait(50); } if (switch_a == 1 || switch_b == 1) { if (wait_off == 0) { newmillis = millis(); wait(10); SLEEP_TIME_W2 = SLEEP_TIME_W; wait(10); interrupt_time = newmillis - oldmillis; wait(10); SLEEP_TIME_W = SLEEP_TIME_W2 - interrupt_time; wait(10); Serial.print("WAS IN A SLEEP: "); Serial.print(newmillis - oldmillis); Serial.println(" MILLISECONDS"); if (SLEEP_TIME_W < 1000) { if (switch_a == 1) { switch_a = 0; digitalWrite(6, HIGH); //wait(10); //playSound2(); //wait(20); //playSound1(); //wait(50); //send(upMsg.set(switch_a)); //wait(200); } if (switch_b == 1) { switch_b = 0; digitalWrite(25, HIGH); //wait(10); //playSound2(); //wait(20); //playSound1(); //wait(50); //send(downMsg.set(switch_b)); //wait(200); } SLEEP_TIME_W = SLEEP_TIME; wait(50); } Serial.println(SLEEP_TIME); Serial.println(SLEEP_TIME_W); Serial.println(SLEEP_TIME_W2); Serial.print("GO TO SLEEP FOR: "); Serial.print(SLEEP_TIME_W); Serial.println(" MILLISECONDS"); } oldmillis = millis(); } } if (timer_status == -1) { if (switch_a == 1 || switch_b == 1) { if (switch_a == 1) { switch_a = 0; digitalWrite(6, HIGH); wait(10); playSound2(); wait(20); playSound1(); wait(50); send(upMsg.set(switch_a)); wait(200); } if (switch_b == 1) { switch_b = 0; digitalWrite(25, HIGH); wait(10); playSound2(); wait(20); playSound1(); wait(50); send(downMsg.set(switch_b)); wait(200); } } else { readBatLev(); } } } void disableNfc() { NRF_NFCT->TASKS_DISABLE = 1; NRF_NVMC->CONFIG = 1; NRF_UICR->NFCPINS = 0; NRF_NVMC->CONFIG = 0; } void turnOffAdc() { if (NRF_SAADC->ENABLE) { NRF_SAADC->TASKS_STOP = 1; while (NRF_SAADC->EVENTS_STOPPED) {} NRF_SAADC->ENABLE = 0; while (NRF_SAADC->ENABLE) {} } } void myTone(uint32_t j, uint32_t k) { // myTone j = 500000 / j; // j k += millis(); // while (k > millis()) { // , digitalWrite(28, HIGH); delayMicroseconds(j); // i «1» j digitalWrite(28, LOW ); delayMicroseconds(j); // i «0» j } } void playSound0() { //wait(500); myTone(1300, 50); // 0,1 2048 wait(20); // 0,1 myTone(1300, 50); wait(50); } void playSound() { //wait(500); myTone(700, 30); // 0,1 2048 wait(10); // 0,1 myTone(700, 30); wait(10); myTone(700, 30); wait(50); // 0,1 //myTone(500, 30); //wait(500); } void playSound1() { //wait(500); myTone(200, 10); // 0,1 2048 wait(10); // 0,1 myTone(400, 5); wait(30); // 0,1 //myTone(500, 30); //wait(500); } void playSound2() { //wait(500); myTone(400, 10); // 0,1 2048 wait(10); // 0,1 myTone(200, 5); wait(30); // 0,1 //myTone(500, 30); //wait(500); } void readBatLev() { //NRF5_ESB_startListening(); wait(200); temp = analogRead(29); vcc = temp * 0.0033 * 100; battery = map((int)vcc, BAT_MIN, BAT_MAX, 0, 100); if (battery < 0) { battery = 0; } if (battery > 100) { battery = 100; } sendBatteryLevel(battery); wait(200); send(powerMsg.set(temp)); wait(200); NrfRSSI = transportGetReceivingRSSI(); NrfRSSI2 = map(NrfRSSI, -85, -40, 0, 100); if (NrfRSSI2 < 0) { NrfRSSI2 = 0; } if (NrfRSSI2 > 100) { NrfRSSI2 = 100; } send(msgRF52RssiReceiv.set(NrfRSSI2)); wait(200); } Questions about this development, about difficulties in your development on Arduinka and Mysensors will always come to the rescue in our telegrams chat .
')
Source: https://habr.com/ru/post/453868/
All Articles