Crawling cd drive
Hi, Habr. In this article I will talk about a simple controlled crawling robot made from an old CD drive. I want to convey only the idea, and not a specific construction, so that everyone, if they so desire, will be able to do something similar from the available details. The article has a lot of light pictures and three gifs for a total of 25 MB.
If someone likes to watch videos, then here is a video about this robot .
Many electronics lovers are thinking about what can be made from obsolete in our time CD drives. The most common application is a laser engraver from a laser head writing a DVD and a coordinate table of two movements from this head. Automatic doors (for example, for cats or hamsters) are usually made from a sliding table for a disk. I made two toys from a sliding table: a “useless car” and a crawling robot. About the useless car, I will not tell, because it is very simple. Who cares, you can watch a video about her .
')
However, the idea of a crawling robot is also quite simple. If someone is not familiar with the design of the CD-drive, you can read about it on Wikipedia .
I'll start with a theoretical description. The figure below shows a crawling CD drive on the side. He has two freely rotating wheels behind his back, called "supporting wheels." In front there is a "steering wheel" with its motor. Below there are two retractable supports for raising the steering wheel.
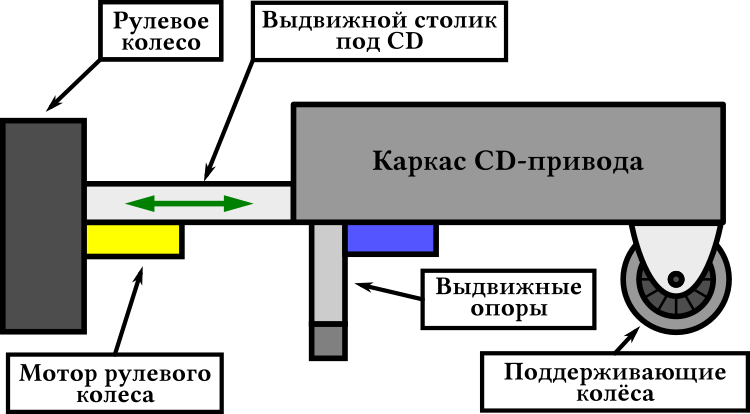
In the following figure, the front view, however, it turned out a little clear.

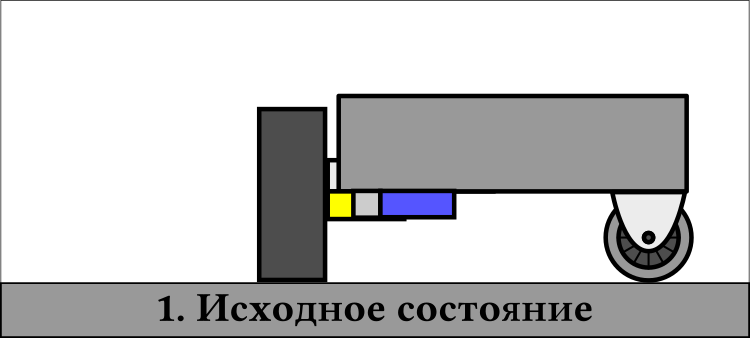
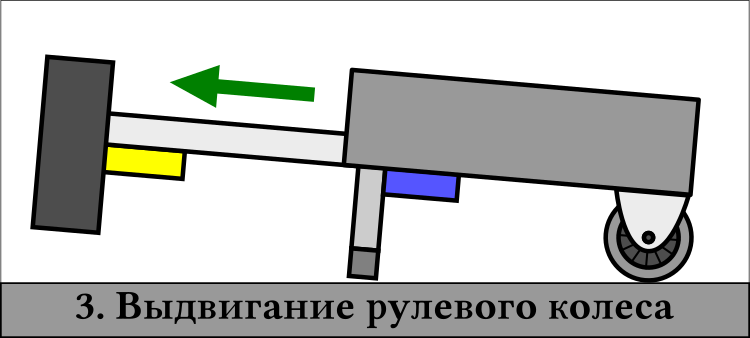
How this system creeps also show in the pictures. So, there is an initial state when the sliding table from the CD and the supports are pushed in. From this position, the robot starts to move forward, backward and performs a turn.
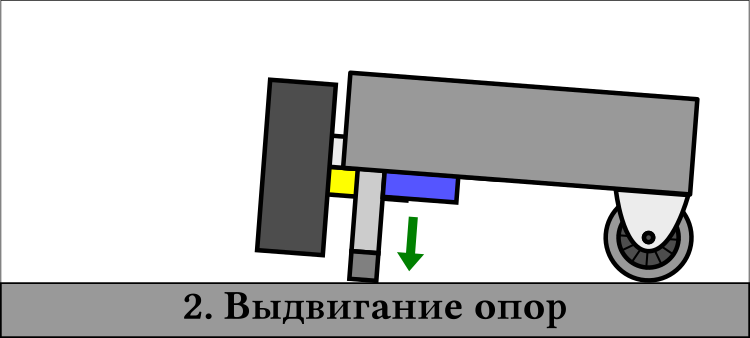
To move forward, the supports first move out, thereby raising the steering wheel.
Then the table for the CD comes out with the steering wheel.
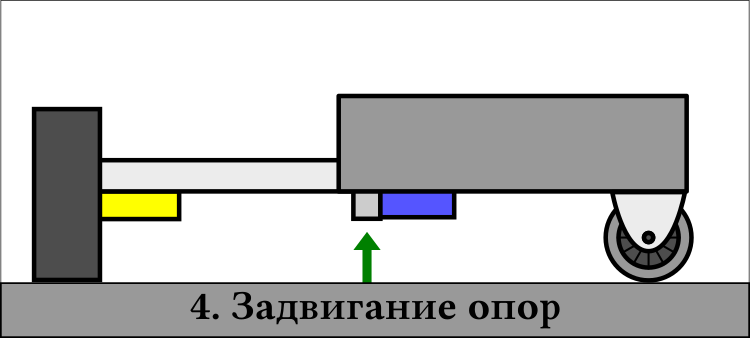
Further support moves and the steering wheel falls.
It now remains to return to its original state by sliding the table for the CD.
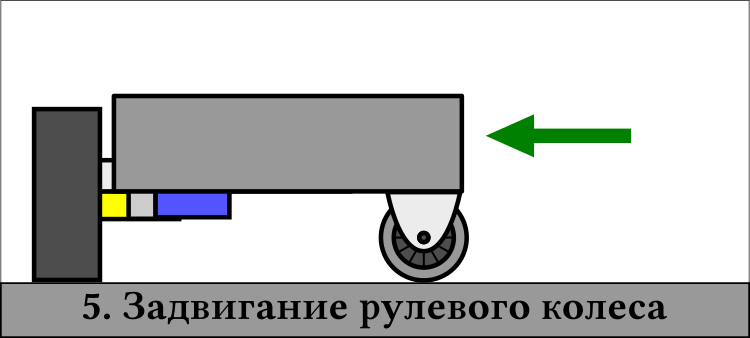
In this case, the steering wheel clings to the surface of the floor, so the entire frame of the CD-drive is pulled up to the steering wheel. Then the cycle repeats.
To rotate the robot in its original state, the motor of the steering wheel is turned on, while the entire system starts to rotate 360 degrees around an axis somewhere between the supporting wheels.
If you understand how this thing works, then you will not be difficult to imagine how the movement backward.
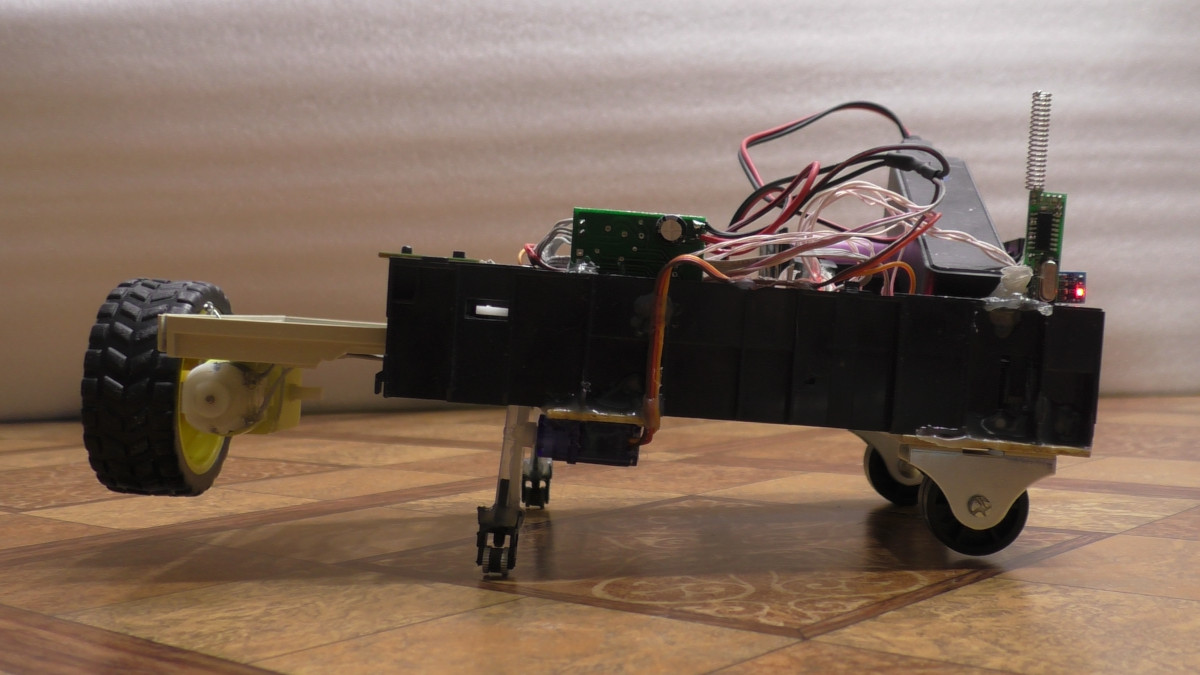
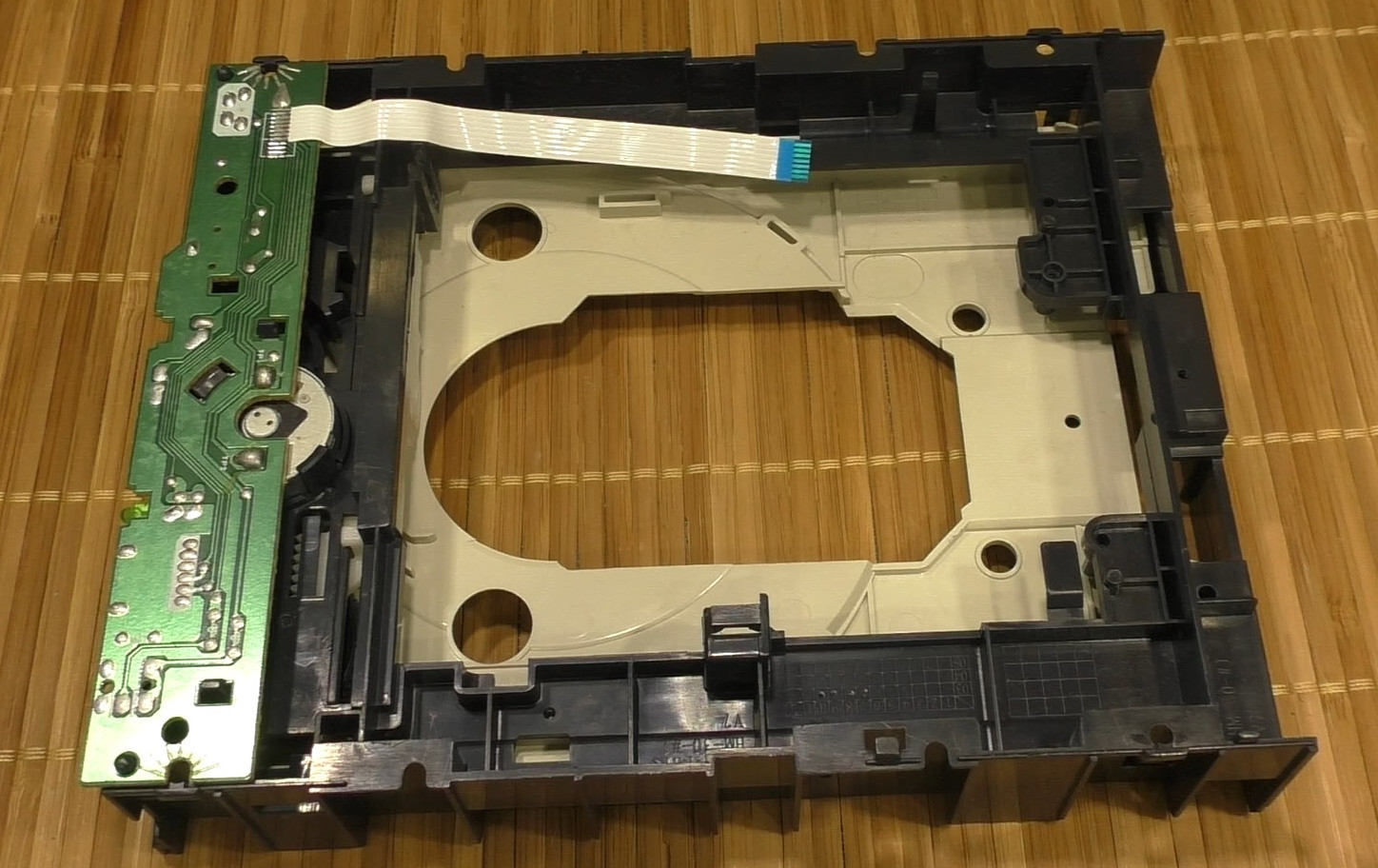
Now a little about my implementation. I will not tell you in detail, since everything has been done somehow, just to test the performance of the idea. As a base, I used a simple CD drive, took out all the optics with a slide, only a plastic frame with a sliding table, a motor, and buttons for the table remained.
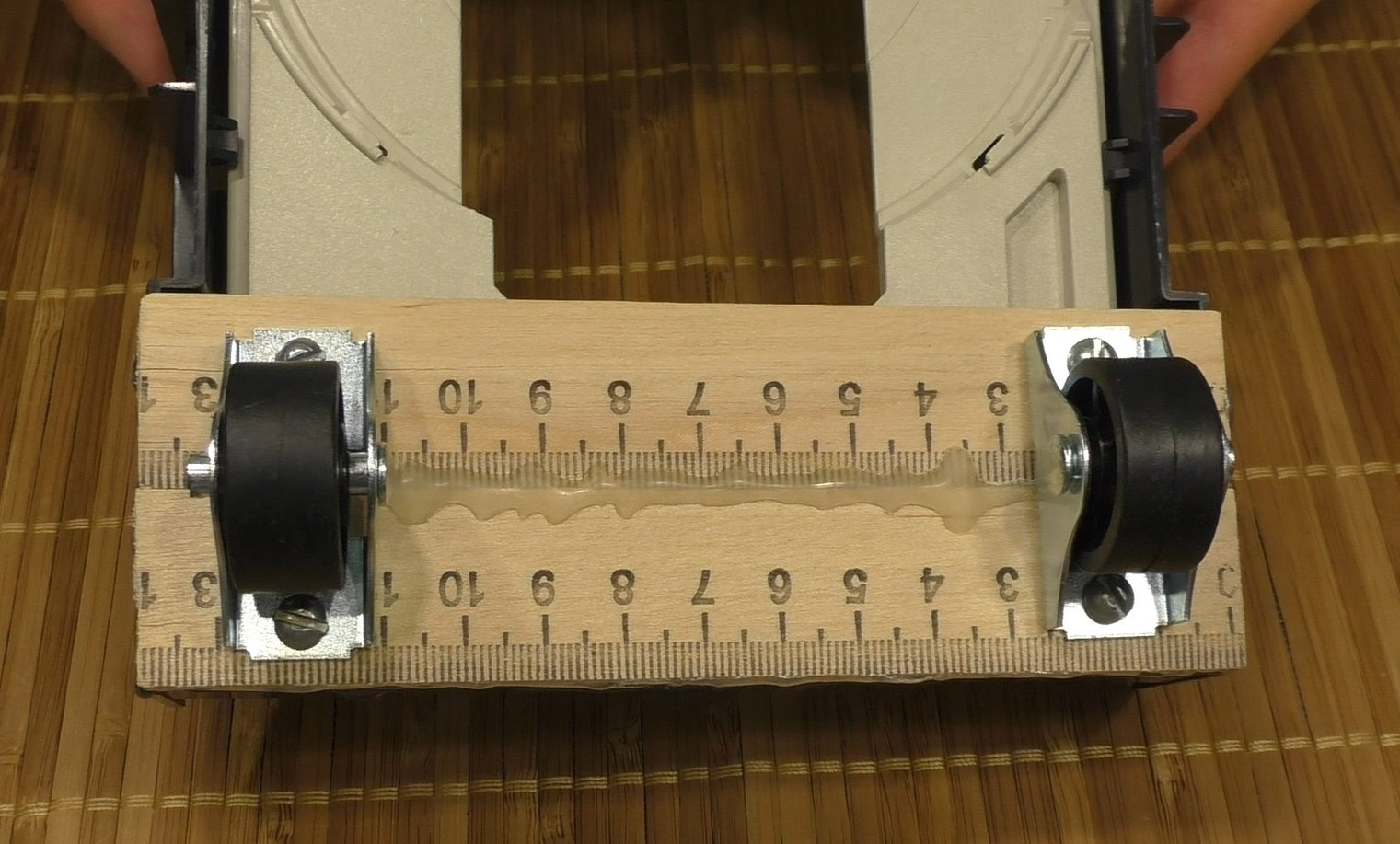
As the supporting wheels attached furniture rollers.
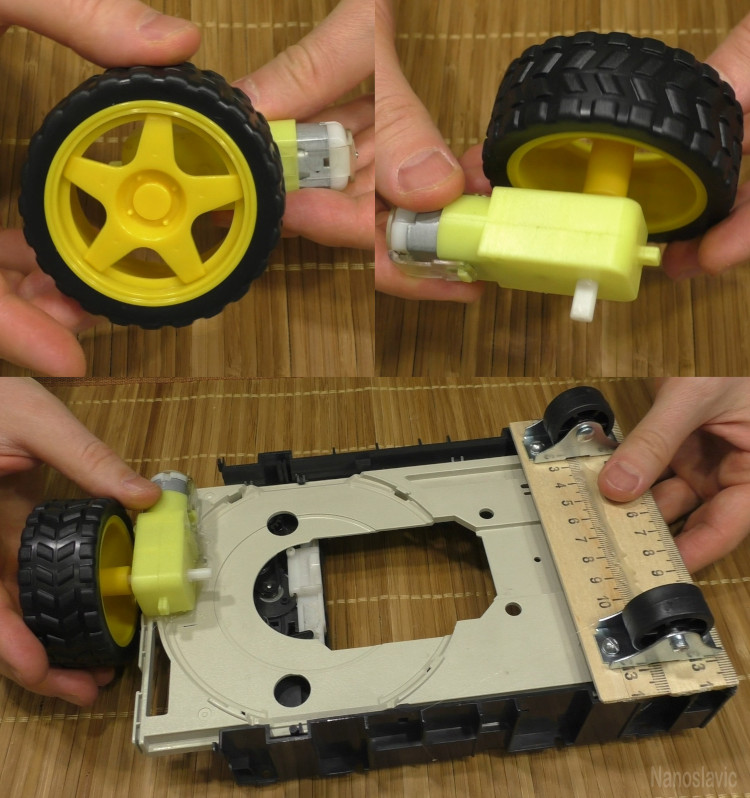
Steering wheel bought separately somewhere on the Internet. He has a motor and a plastic gearbox.
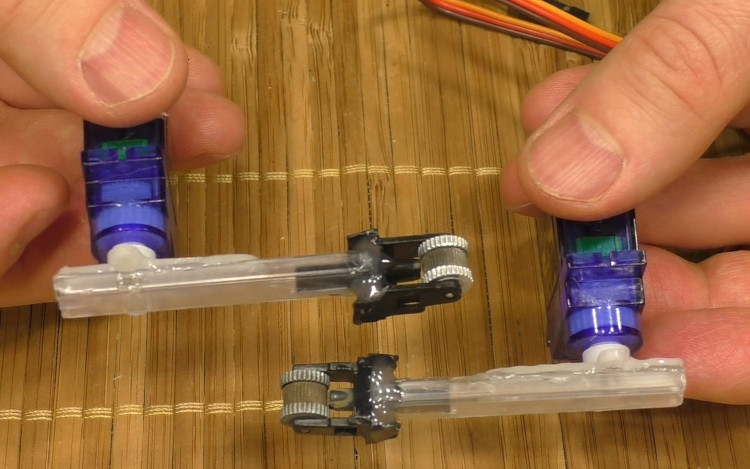
Retractable supports made of plastic tubes, which are sold in bulk chips in the body of SO8. He attached a chair for cigarette lighters to them, after removing a flint and a spring from them so that the chair rotates freely. For pushing supports used two cheap servos. Everything is collected, mainly on hot melt.
Electronics was made from what was, therefore, it is not very optimal. To control the CD table and steering wheel motors, a bridge transistor circuit was used. This allowed to change the direction of rotation. As logic - some kind of Arduino board. To control the movement took the remote control and the receiver receiver circuit at a frequency of 434 MHz.

To power the motors, I connected in series three lithium-ion batteries without any protection, so I switched on with caution, sometimes checking their charge. For powering the digital part and the radio receiver, I used a small cheap superbank issuing 5 V.
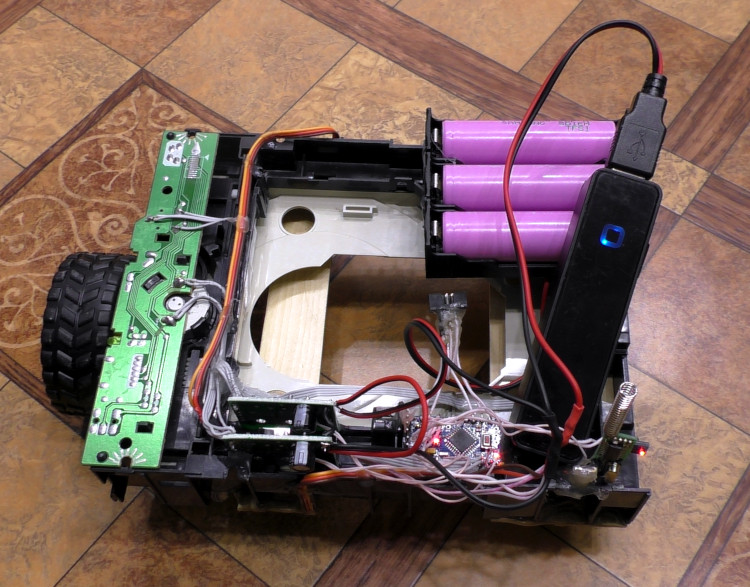
The batteries in the rear are very useful, as the steering wheel outweighs a lot when pushing forward.
The control program, when turned on, checks the switches of the sliding table of the CD and brings the system to the initial state. To control using 4 buttons. When you click on the "Forward" button, it starts moving forward. Stopping and returning to the initial state of the system occurs when you press any button on the remote control. When you press the "Back" button, you move backward, also with a stop when you press any button. The “Left” and “Right” buttons work only in the initial state and only while they are pressed.
As a result, it turned out that only forward movement normally works. When moving backwards, the center of gravity shifts greatly when the steering wheel is extended, so the supports cannot lift it normally. Looking for more powerful servos. Since the system always returns to its original state, the movement is possible only by “steps” determined by the length of the CD table, but this is a purely software limitation.
And finally, a little gif.
Move forward, side view, 6.8 MB
Move forward, top view, 7.8 MB
Rotate, top view, 6.3 MB
I think that the whole system can be simplified by making the control panel on the loop, and controlling the motors with buttons and switches. To control servos, you can make a simple generator on timers 555. Power can be made from ordinary batteries and placed in the console, reducing the weight of the robot. Such a remote control will allow the robot to be controlled completely manually.
Thank you all for your attention and good crafts for you.
Source: https://habr.com/ru/post/450912/
All Articles