Robot Operating System Meetup Russian 2019

In the world of robotics, a software framework has been developing successfully for a long time, which allows rapid prototyping of robotic systems - the Robot Operating System (ROS). We at the Sberbank Robotics Laboratory are actively using it in developing our own projects. Having accumulated a certain experience and noting that in Russia there has not yet been a single practical RAP meeting, we decided to organize it and share knowledge, and at the same time get to know the robotics community. Already on April 16, in Skolkovo, as part of the Skolkovo Robotics 2019 Forum, ROS Russian Meetup 2019 will be held - this is an opportunity for ROS developers and robotics of all levels to devote one day to lively sharing experience and communicating with the community. If you are familiar with ROS, then you can safely go to the registration form , the program and organizational information is also available there. At the mitap, we will discuss the history of ROS and the principles of the community, devote a lot of time to practical reports about SLAM and navigation through the laser lidar indoors, about the robot path planner. We will show how to control industrial manipulators via ROS, how to use sensor data, how to work with the SMACH state machine. And even tell you how to easily install a ROS and start developing a robot.
By the way, participation in the mitap is free, but since the number of places is limited, we ask you to wait for confirmation. And for those who are not familiar with ROS, we offer a small review.

Two-dimensional view of the world through the eyes of ROS
Robot Operating System is a software framework for robots that implements the basic algorithms for building complex robots. It includes a set of tools, libraries and standards designed to simplify the task of creating complex and reliable robot behavior on a wide variety of robotic platforms.
')
The main ideology of the project are the principles of open source, documenting packages, code reuse and the global community of robotics.
Why was it created
Creating a truly reliable universal software for robots is difficult. From the point of view of the robot, problems that seem trivial to humans are poured into the high complexity of programming a robotic system by a developer. It is so difficult to work with these tasks that it is sometimes not possible to solve them alone or with a small team.
As a result, ROS was created from scratch to encourage collaborative software development for robotics. For example, one lab may have experts on indoor SLAM and may offer a world-class system for SLAM. Another group might have experts in using SLAM to navigate, and another group could develop a computer vision approach that works well for recognizing small objects in a messy environment. ROS was designed specifically for such groups to collaborate and build upon each other’s work.
Short background
ROS is a big project with a history and a large number of participants. The need for an open collaboration system was necessary for many people in the robotics research community, and many projects were created for this purpose.
In the mid-2000s, various efforts were made at Stanford University related to the use of AI in robotics, for example, the STanford AI Robot program (STAIR) and the Personal Robots program (PR) to create their own prototypes of dynamic software systems intended for use in robotics . In 2007, Willow Garage provided significant resources to further expand these concepts and create prototypes. The efforts were supported by countless researchers who shared their time and experience both to contribute to the core ideas of ROS and to the main software packages. All software was developed using the BSD open source license and gradually became a widely used platform in the robotics community.
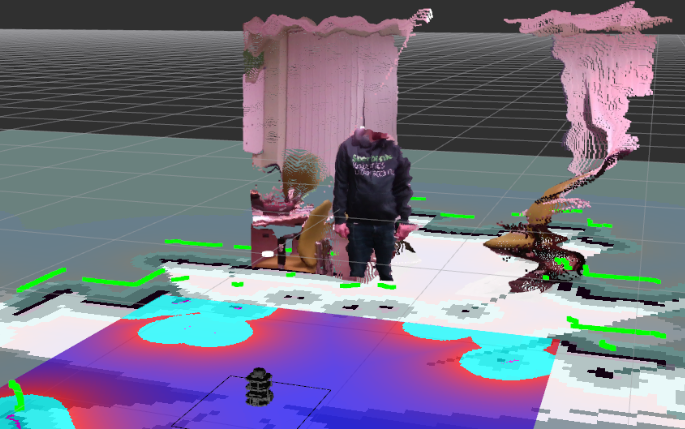
Three-dimensional view of the world through the eyes of ROS
ROS global community
From the very beginning, ROS was developed in several institutions and for several robots, including many institutions that received PR2 robots from Willow Garage. Although it would be much easier for all participants to place their code on the same servers, over time, the “federated” model became one of the strengths of the ROS ecosystem. Any group can run their own ROS code repository on their own servers, and they fully own and control it. They do not need anyone's permission. If they decide to make their repository publicly available, they can be recognized by the community they deserve for their achievements, and benefit from testers and suggestions for improvement, like all open source projects.
Over the past few years, ROS has grown and now includes a large user community around the world. Historically, most users were in research laboratories, but increasingly they appear in the commercial sector, especially in industrial and service robotics.
The ROS community is very active and has more than 3,000 participants on the discourse.ros.org list, more than 8,000 users on the wiki joint documentation page and about 22,500 users on the ROS questions website. Wikipedia contains more than 22,000 pages, and the rate of edits is about 30 per day.
At the moment, the number of Russian-speaking users of ROS is in 15th place among other countries according to ROS Metrics Report 2018. Let's meet, discuss and fix it. You can also learn about the ROS capabilities for your projects, about the actual practice of developing robots.
To participate as a listener fill out the form .
And if you have an interesting message for the community, you can still become a speaker .
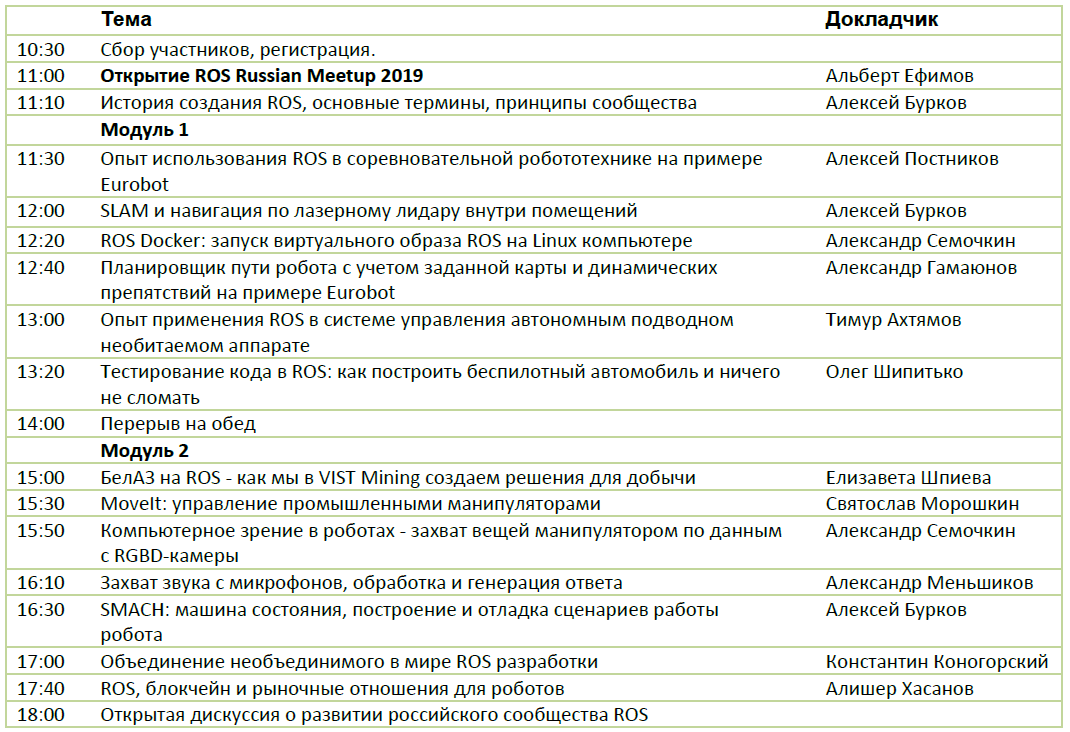
Program:
The event was organized by the Sberbank Robotics Laboratory.
Source: https://habr.com/ru/post/447350/
All Articles