The Chang'e-4 mission is the fourth lunar day for the landing module and the Yuuta-2 rover. Pro cameras and controllers on devices

How time flies! The fourth terrestrial month of work has already arrived on the far side of the Moon of the Chang'e-4 landing module and the Yuuta-2 rover. The vehicles survived a period of extremely low-temperature environment on the third lunar night, now they have come out of sleep mode and have begun a new study of the surface of the moon and outer space.
What cameras are installed on the “Chang'e-4” module and the “Yuuta-2” rover and what are the devices removed on long lunar days?
Previously published materials about the mission "Chang'e-4":
1. The spacecraft "Chang'e-4" made a successful landing on the far side of the moon and sent the first photo
')
2. On-board video of the processes of preparation and landing, as well as a panorama of the far side of the Moon from Chang'e-4
3. Video of the descent of the rover "Yuytu-2", its first meters on the surface of the moon. Two week sleep on the moon is over
4. Pride and Passion, the story of turning a dream into a space project
5. NASA lunar orbital probe made the first pictures of the China Chang'e-4 station - two pixels of light
6. Module "Chang'e-4" and rover "Yuytu-2" are ready for the second night on the far side of the moon
7. NASA lunar orbital probe made new images of the China Chang'e-4 station - closer and clearer
8. Interesting facts about the history of the Chinese lunar program and the Chang'e-4 space mission
9. The Chang'e-4 mission is the third lunar day. Rover "Yuytu-2" in search of ... stones
10. The mission “Chang'e-4” - scientific equipment on the landing module and the satellite transponder
1. The spacecraft "Chang'e-4" made a successful landing on the far side of the moon and sent the first photo
')
2. On-board video of the processes of preparation and landing, as well as a panorama of the far side of the Moon from Chang'e-4
3. Video of the descent of the rover "Yuytu-2", its first meters on the surface of the moon. Two week sleep on the moon is over
4. Pride and Passion, the story of turning a dream into a space project
5. NASA lunar orbital probe made the first pictures of the China Chang'e-4 station - two pixels of light
6. Module "Chang'e-4" and rover "Yuytu-2" are ready for the second night on the far side of the moon
7. NASA lunar orbital probe made new images of the China Chang'e-4 station - closer and clearer
8. Interesting facts about the history of the Chinese lunar program and the Chang'e-4 space mission
9. The Chang'e-4 mission is the third lunar day. Rover "Yuytu-2" in search of ... stones
10. The mission “Chang'e-4” - scientific equipment on the landing module and the satellite transponder
So far, 88 days have passed (2212 hours) after the landing of the Yuytu-2 rover on the Moon's surface and 115 days (2760 hours) after launching the Yuyuta-2 rocket from the Sichan space center as part of the Chang'e-4 mission to the Moon.
The fourth lunar day on the far side of the moon:
The planned duration of the landing module is one year, the rover - three months.
In fact, the Yuuta-2 rover has already developed its estimated working life at 2160 hours.
This is not a record for the Chang'e lunar missions, the first Chang'e-3 landing gear, located on the visible part of the Moon since December 2013, still shows signs of life (telemetry and data from different instruments), but his partner for this disembarking - the first rover “Yutu”, although it lost mobility 40 days after the start of productive work on the lunar surface, until the middle of 2016 transmitted to the MCC data in a stationary mode.
Data on the modules of the lunar mission "Chang'e-4":
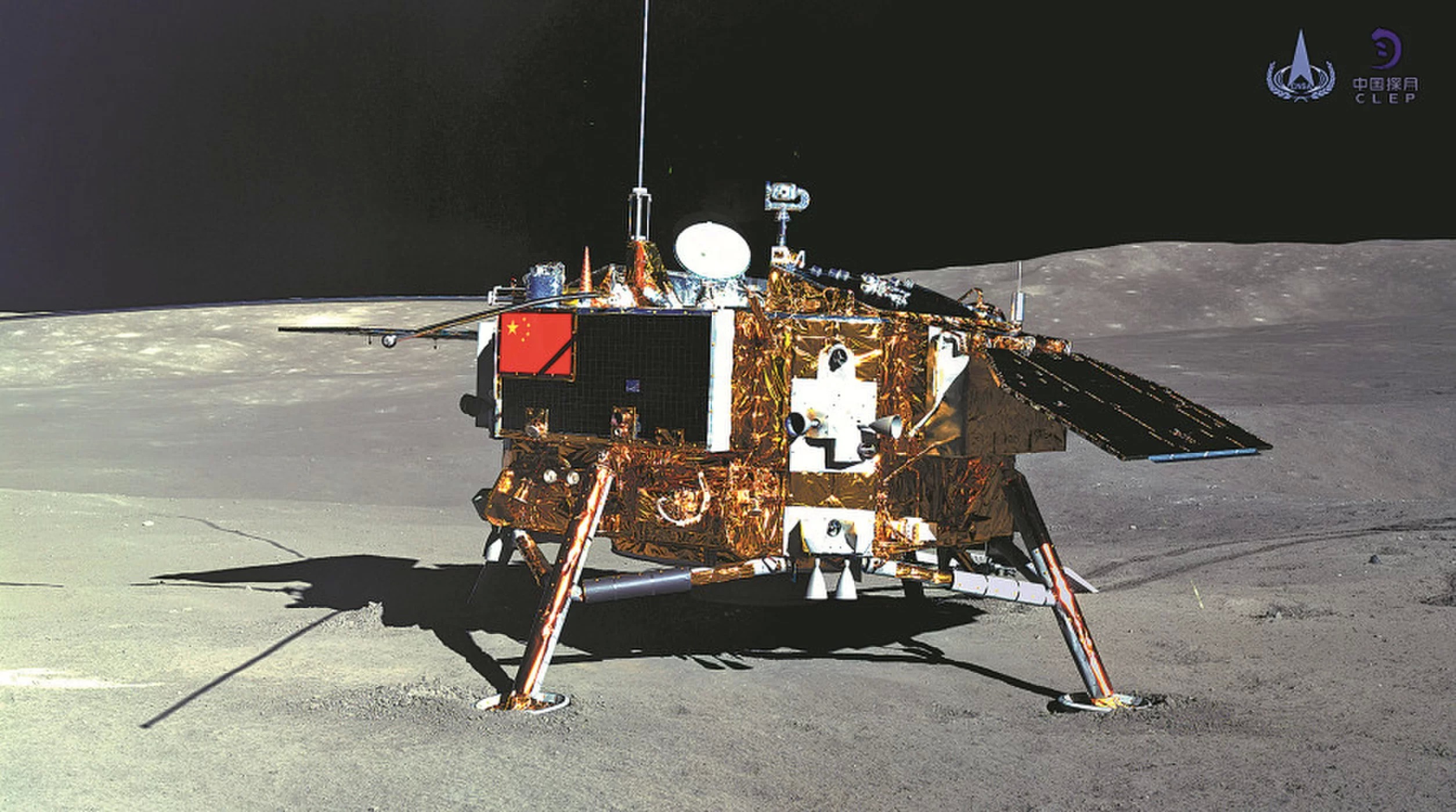
- the Chang'e-4 descent module (4.4 meters between the opposite landing legs, weight 1200 kg.);
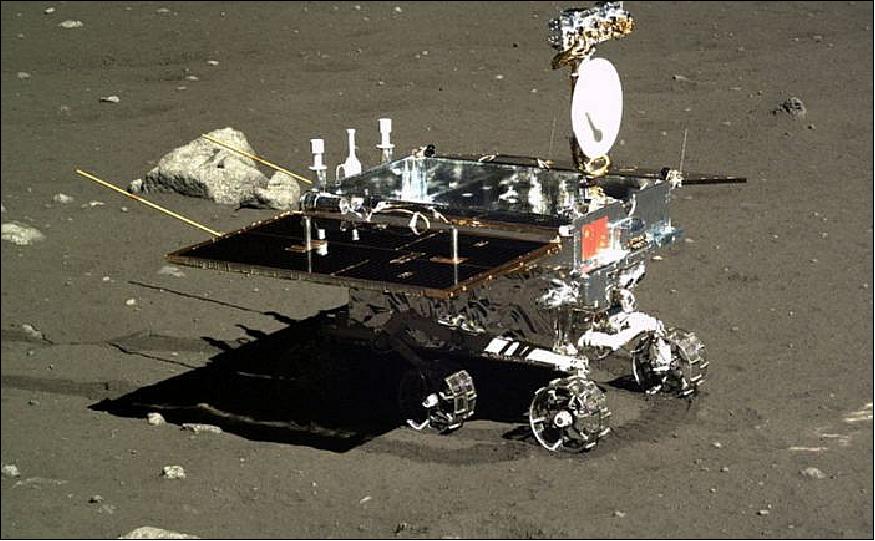
- Yuytu-2 rover (height 1 meter, width 1 meter (without solar batteries), 1.5 meters in length, two folding solar panels, six wheels, weight 140 kg.).
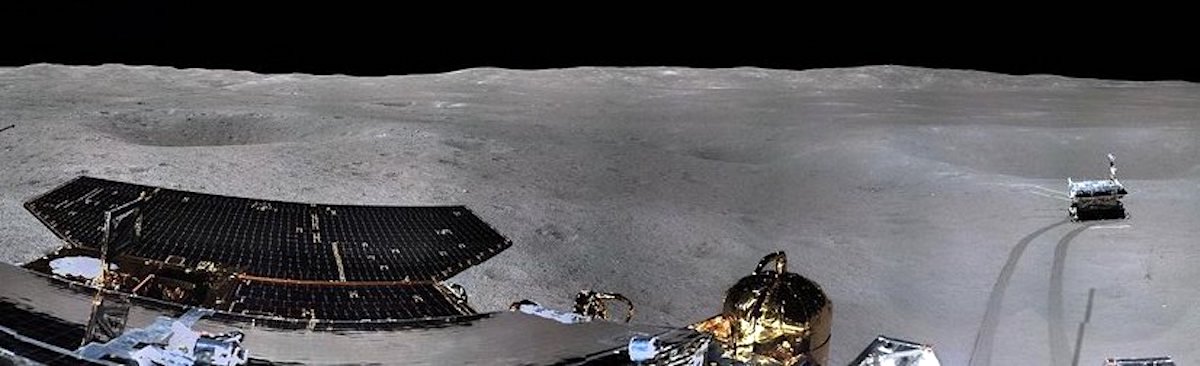
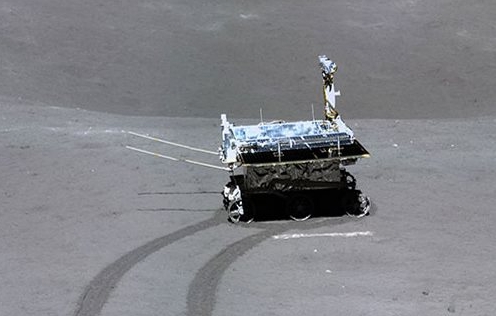
New photos from the back of the moon
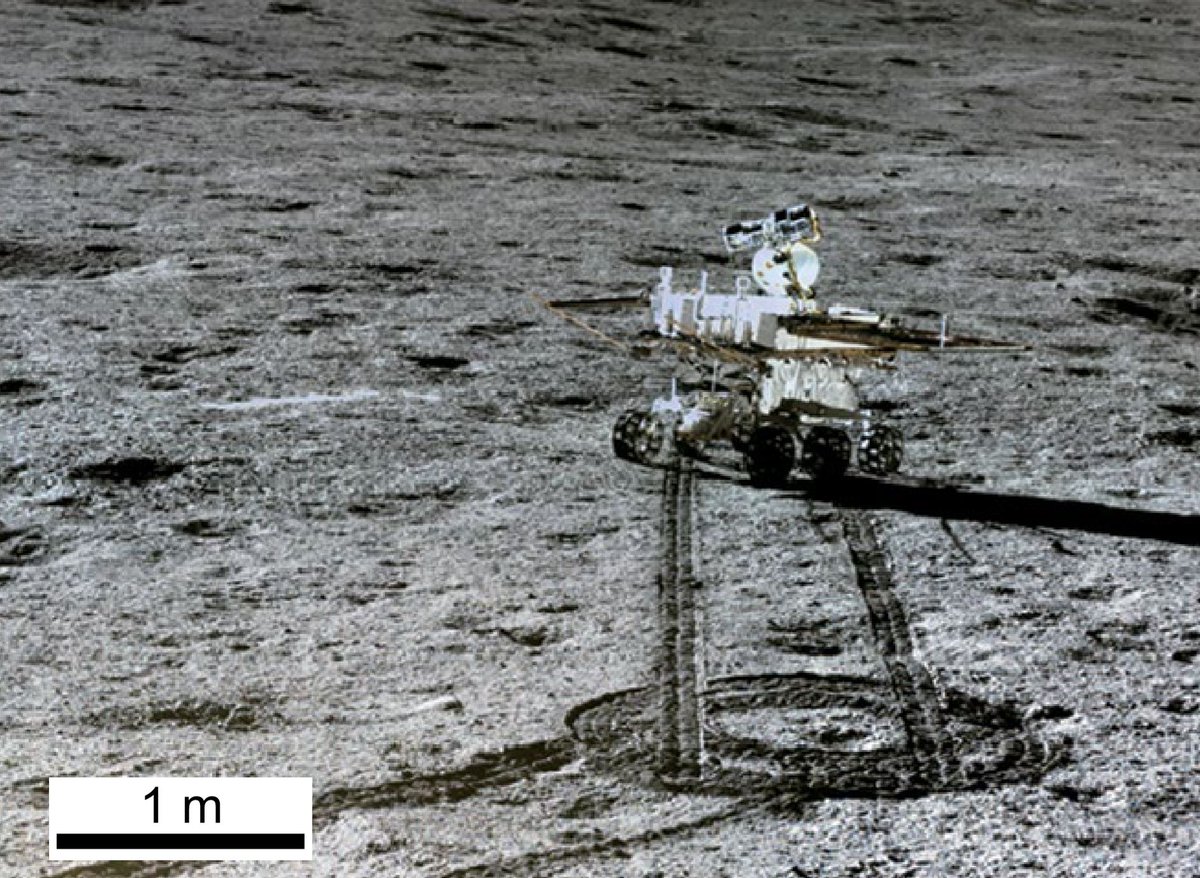
Moon track from the wheels of the “Yuytu-2” rover and the shadow from the antenna and the platform with a panoramic camera:

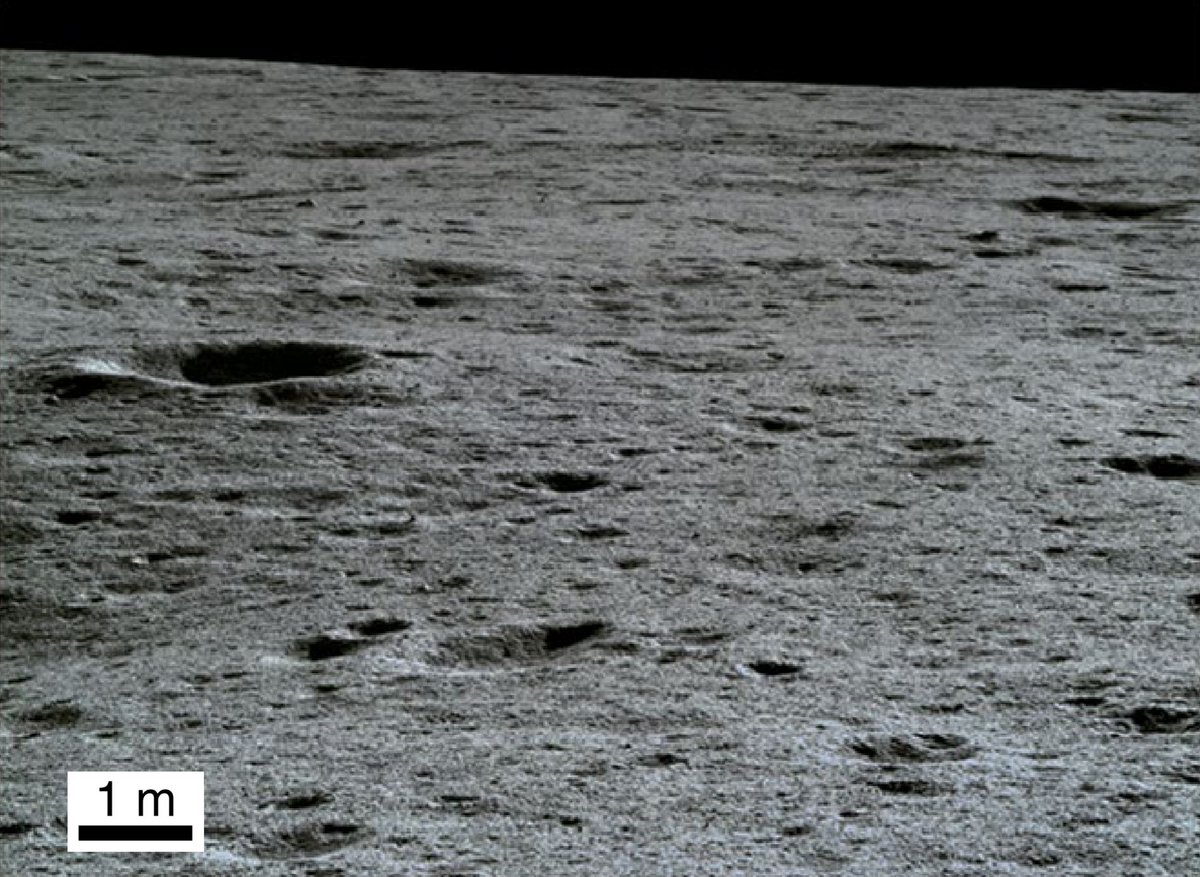
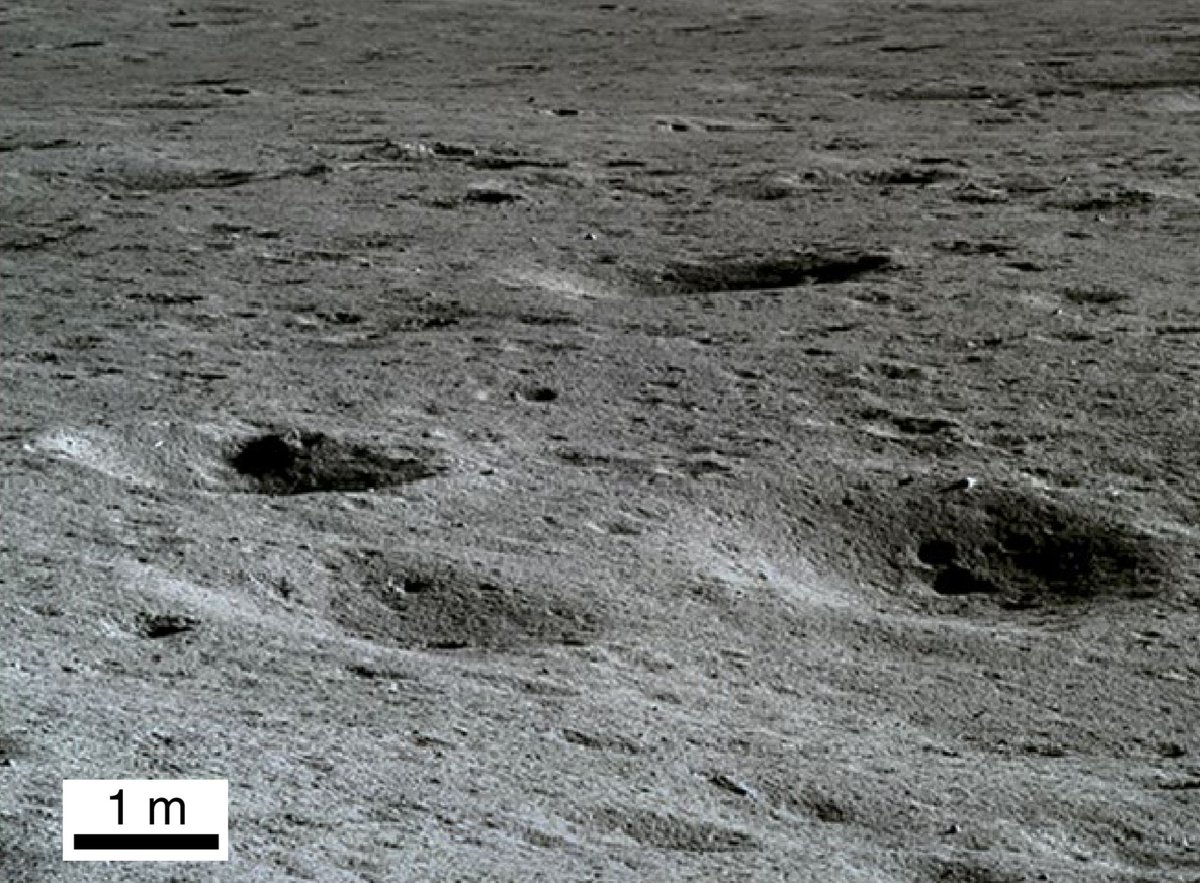
Several craters (with shadows beautifully) and mountains in the background:

But these photos from the scientific article "Lunar farside to be explored by Chang'e-4" April issue of the journal Nature Geoscience.

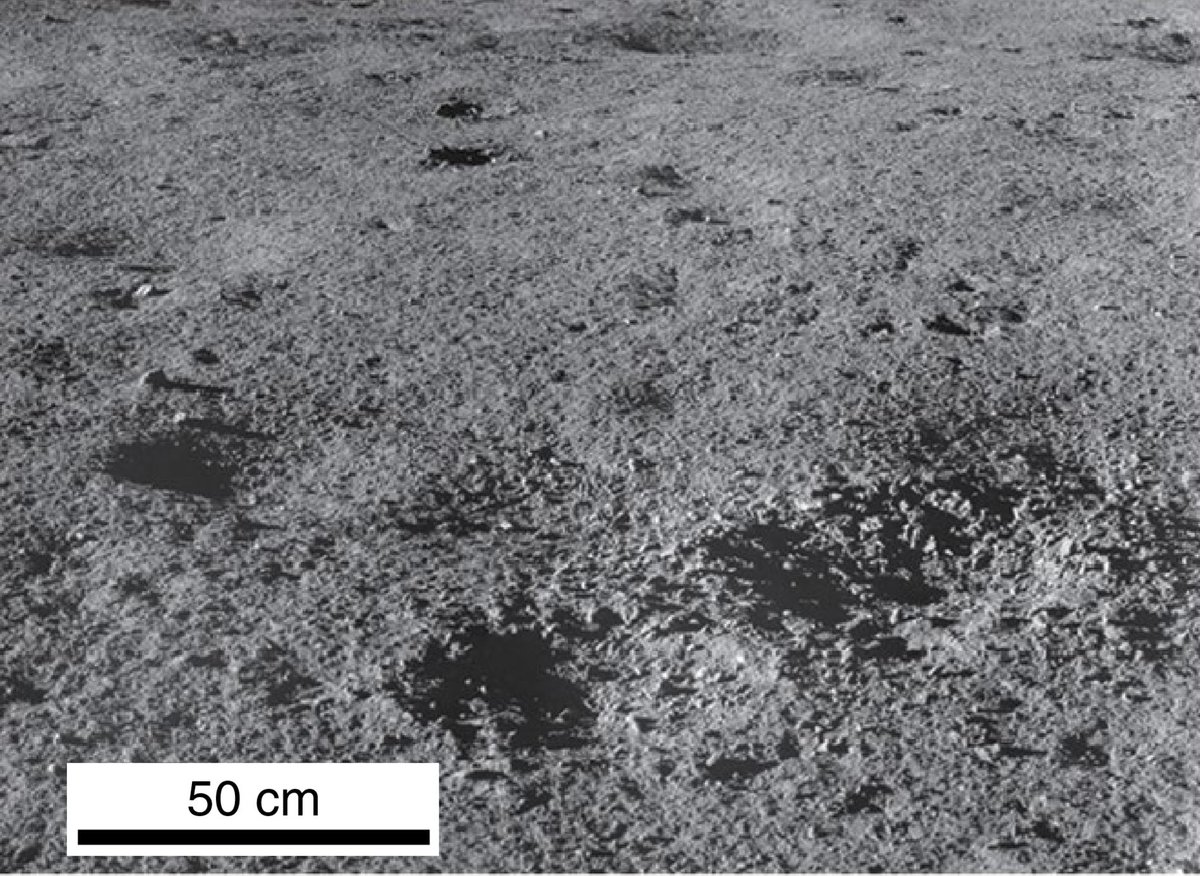
Small craters near the landing site:
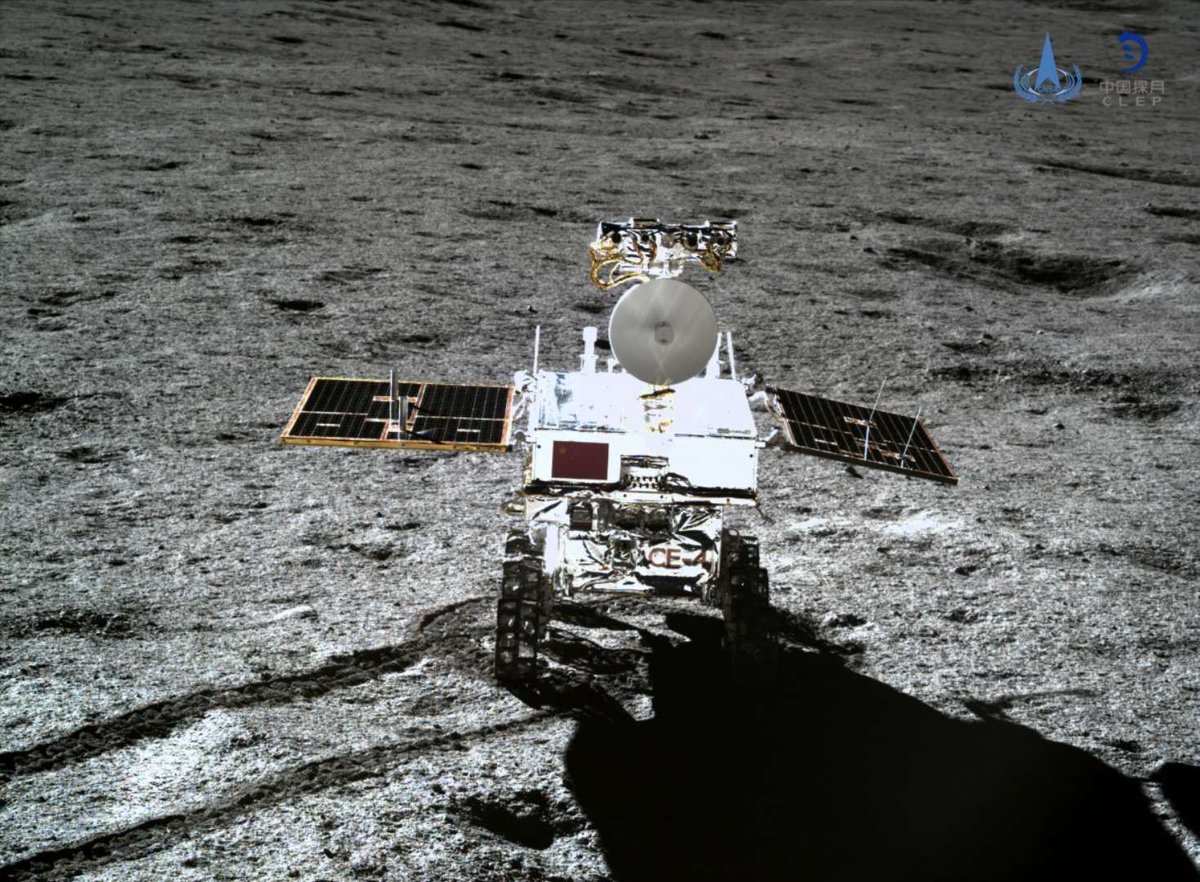
Rover "Yuytu-2" explores the surface of the moon:
Fragments of stones in small craters (photo from the “Yuytu-2” rover):
Small stones in the direction of the rover "Yuytu-2":

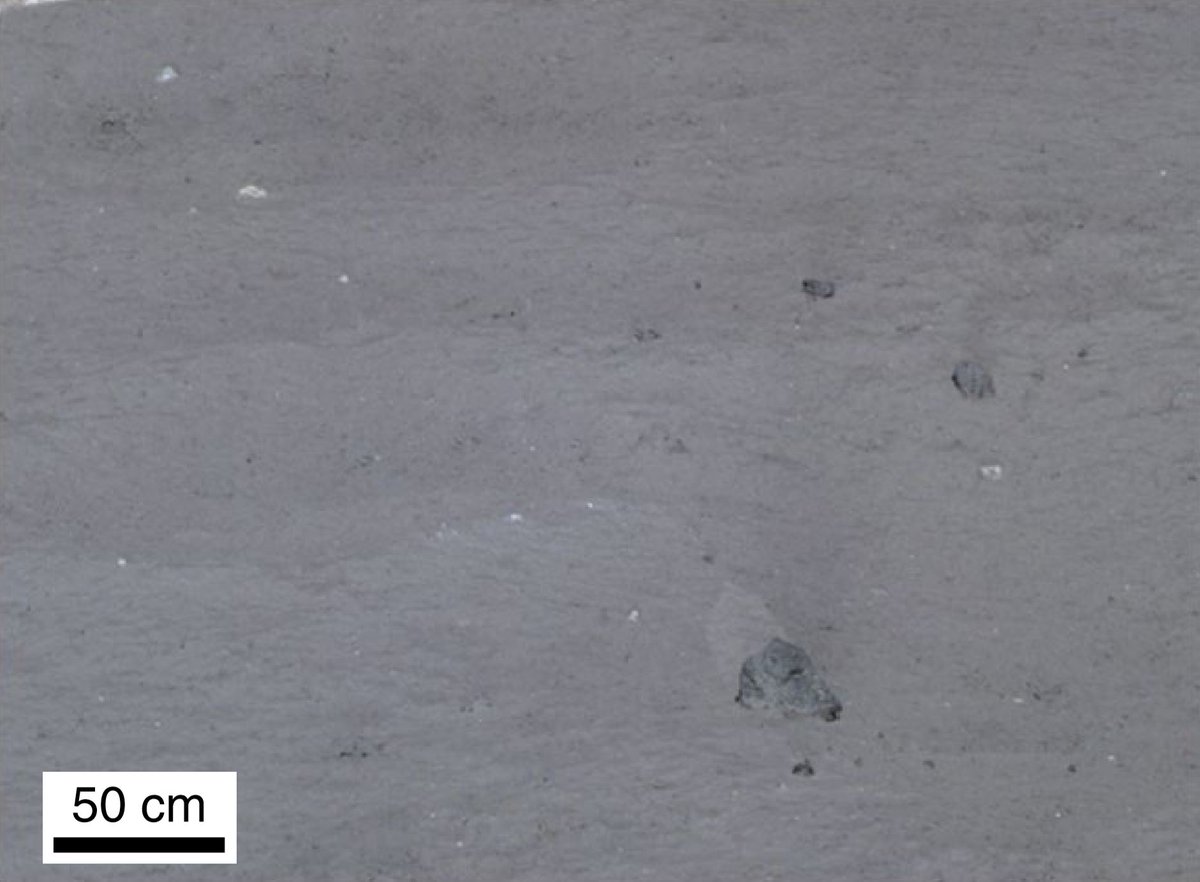
Very unusual dark stones near the landing site:
What cameras are installed on the Chang'e-4 module and the Yuuta-2 rover?
On the landing module "Chang'e-4" there are two cameras:
- Landing camera (Landing camera - LCAM);
- landscape camera (Terrain camera - TCAM).
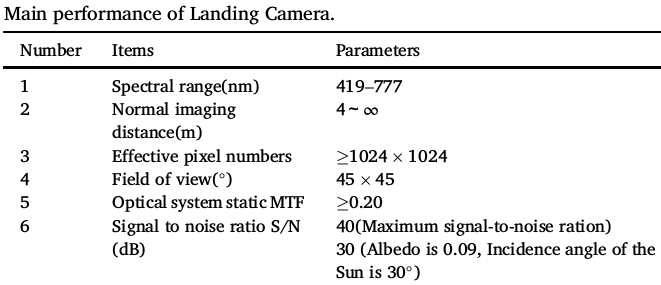
The LCAM landing camera (0.5 kg, size 116x100x70.4 mm) is installed on the bottom of the Chang'e-4 module, turned on automatically at a height of 12 km above the lunar surface to record the landing procedure with a resolution of 1024x1024 pixels, 10 frames per second.
Video of the landing procedure from the LCAM camera - several thousand frames collected in one video
Characteristics of the LCAM landing chamber:
The communication scheme of the elements of the landing chamber LCAM:
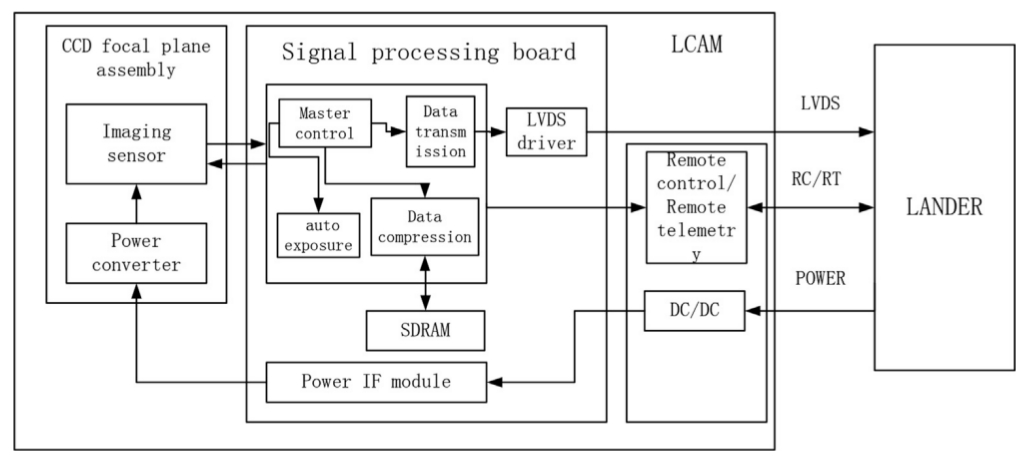
Data transmission is carried out using the LVDS interface (low-voltage differential signaling).
After landing on the moon, the LCAM camera captures only the same frame with the landing support:

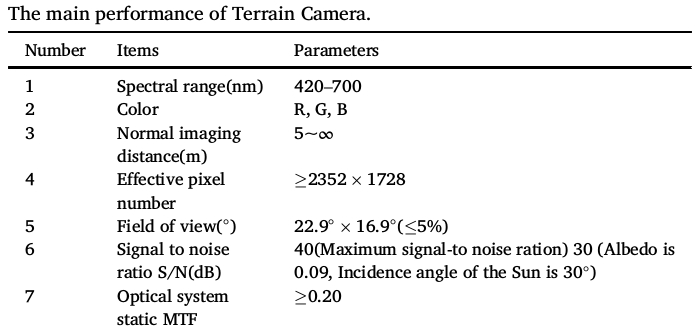
The TCAM landscape camera (0.64 kg, size 92x105x118.9 mm) is installed at the highest point of the Chang'e-4 boarding module on a special bracket that allows the camera to rotate 360 degrees around its axis and can tilt the camera up or down at an angle of up to 120 degrees Panoramic photographs of the surface and elements of the boarding module, tracking of the rover and exploring the terrain around the landing zone are TCAM functions.
Characteristics of the TCAM landscape camera:
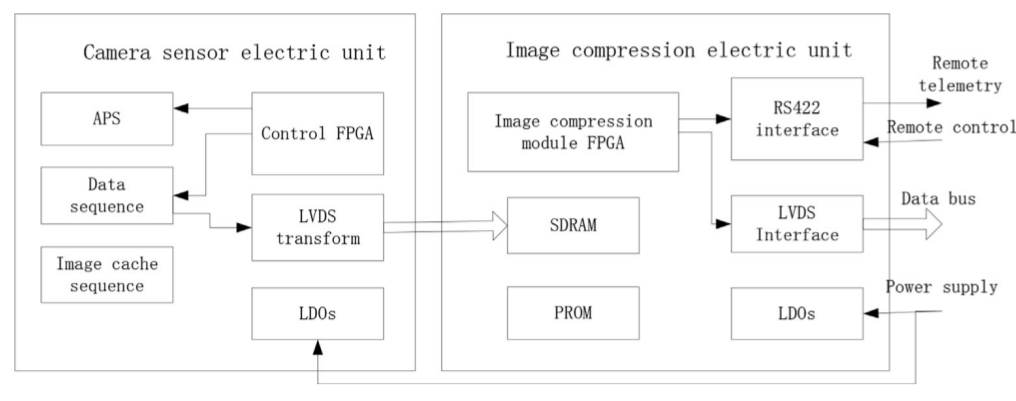
Communication scheme elements of the landscape camera TCAM:
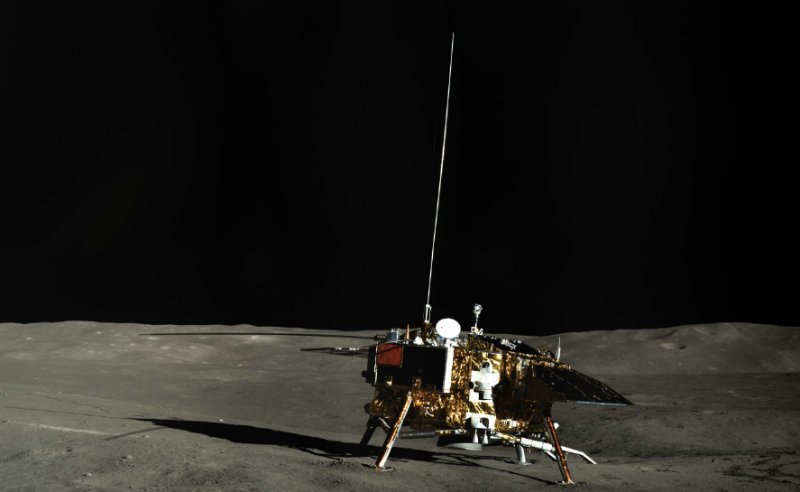
Panorama landing sites:

LCAM and TCAM cameras on the landing module:

The landing module "Chang'e-4" works in a stationary mode and its photographs of the surface in the landing zone are first of all very important for understanding what types of surfaces are actually around the module. After all, there are a large number of small craters and stones, and they can interfere (in the worst case) with the rover launching. Since after landing, the module Chang'e-4 cannot change its position and make a “jump” to another zone more convenient for landing.
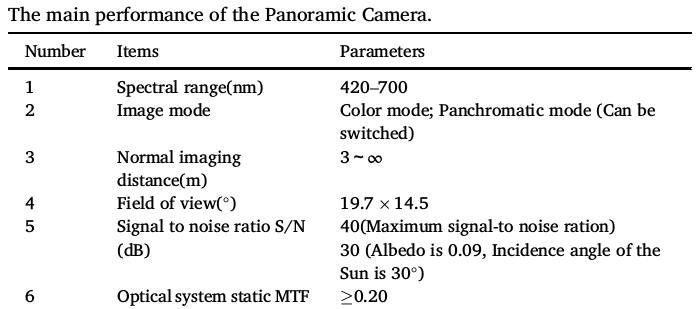
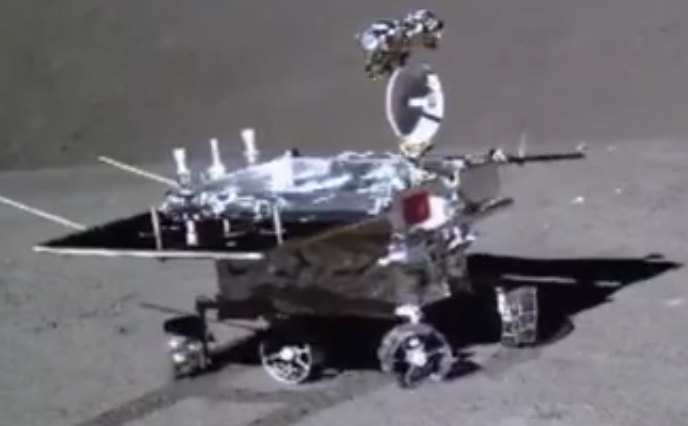
A double panoramic camera (Panoramic camera - PCAM) was installed on the “Yuuta-2” rover.
The PCAM panoramic camera (0.69 kg, size 90x110x120 mm) is installed at the highest point of the “Yuuta-2” rover on a special wide mast bracket that allows the camera to rotate 360 degrees around its axis to be able to photograph the panoramic view of the surface.
Since the camera consists of two identical modules, a 3D image is compiled using them, using the binocular stereovision method. To obtain a color image in the PCAM camera, Bayer filter (color filter arrays) is used.
PCAM panoramic camera specifications:
The connection scheme of the elements of the panoramic PCAM camera:

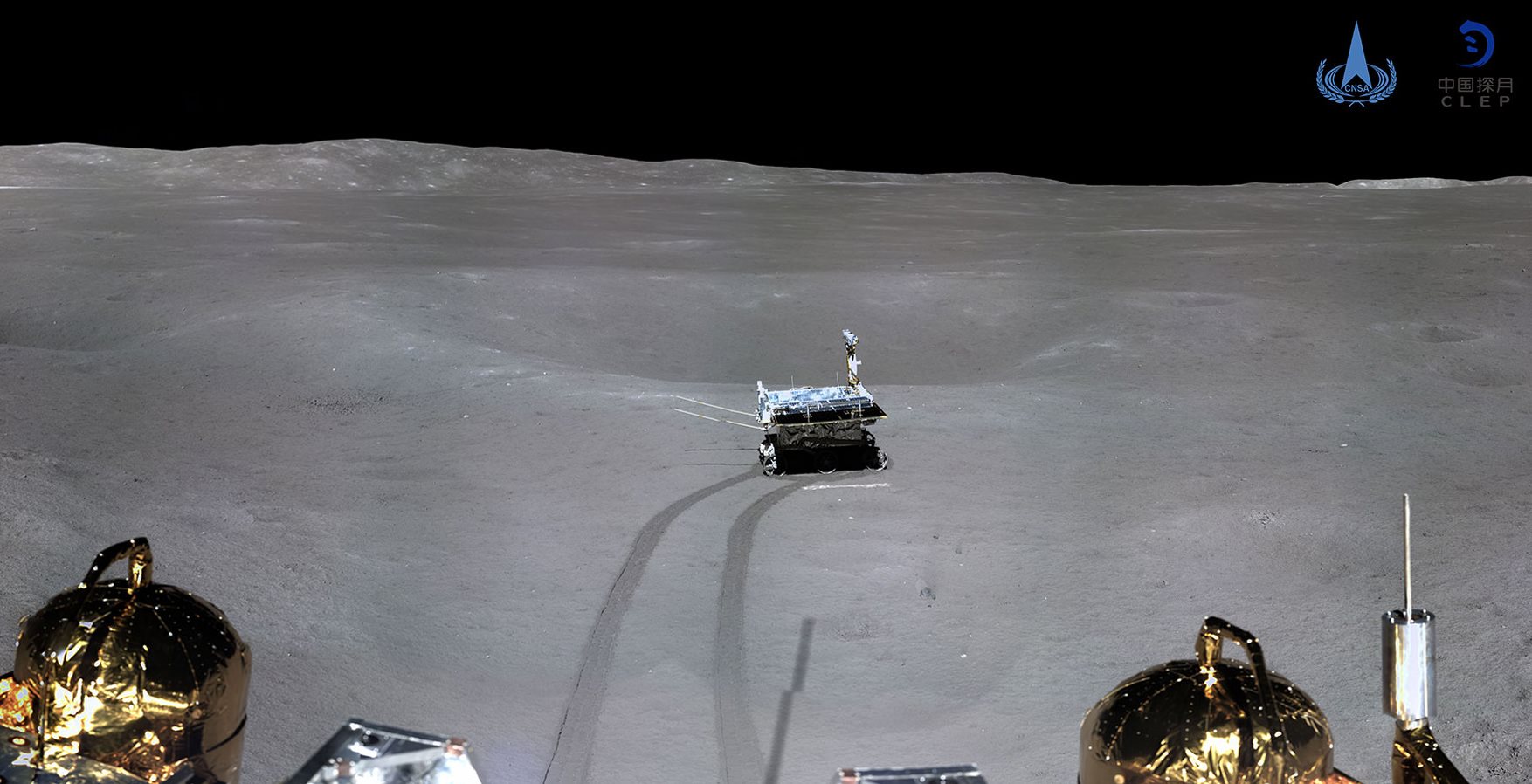
General view of the surface panorama from the “Yuytu-2” rover:

PCAM camera on the rover:

January 3, 2019, after the end of all stages of the successful landing procedure and the installation of independent communication channels with Chang'e-4 devices (boarding module and rover), the era of photo research on the far side of the moon began.
Photos from cameras cameras:
Landing camera LCAM:






Terrain camera TCAM:



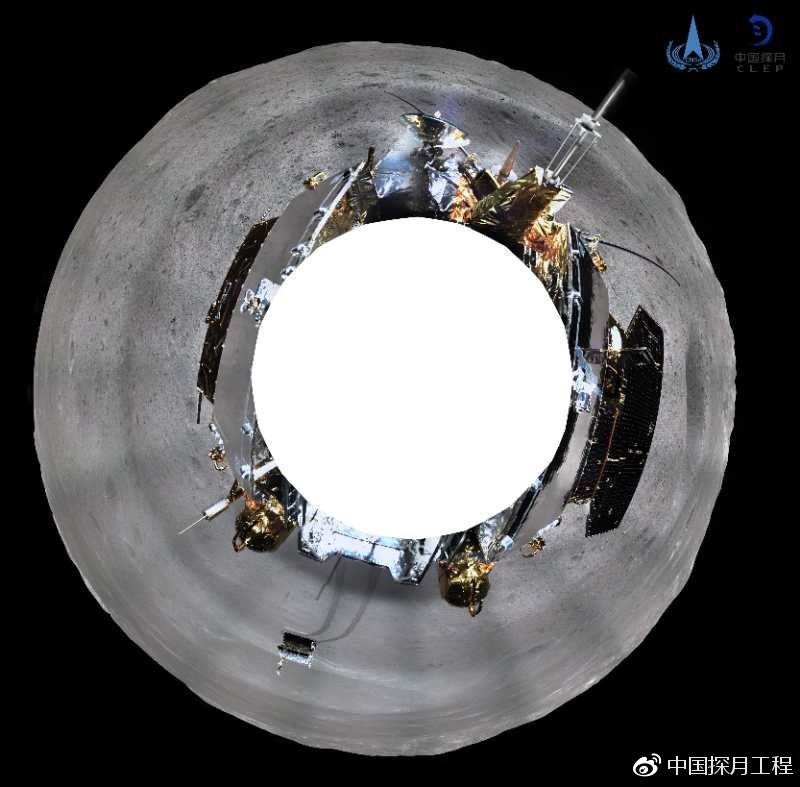



Panoramic camera PCAM (rover):



Rover Yuytu-2 is a mobile and very productive space partner of the landing module Chang'e-4.
Rover "Yuytu-2" drove more than 160 meters on the complex surface of the far side of the moon.
The path of the "Yuytu-2" rover for three lunar days:


I wonder how the front wheels work on the Yuuta-2 rover when turning on the spot:

Video descent rover "Yuytu-2"
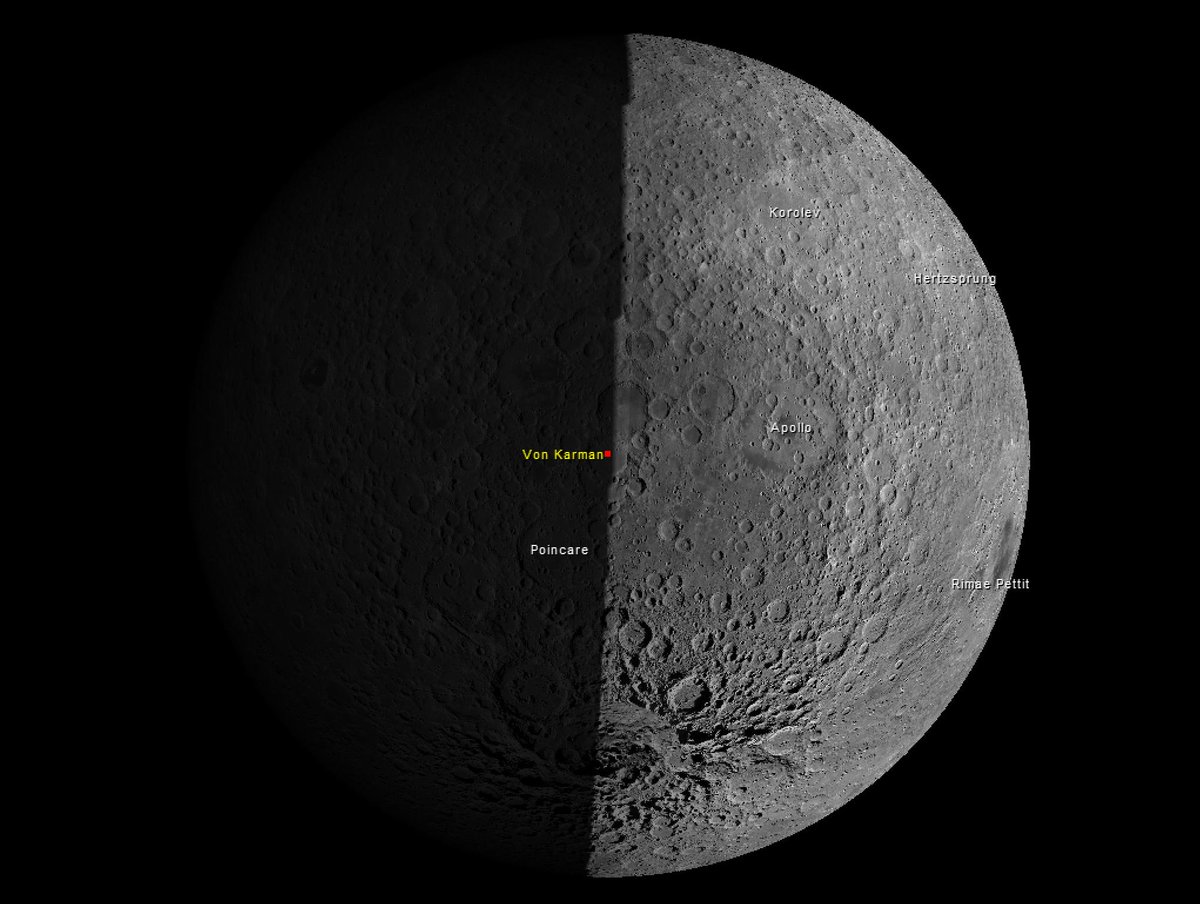
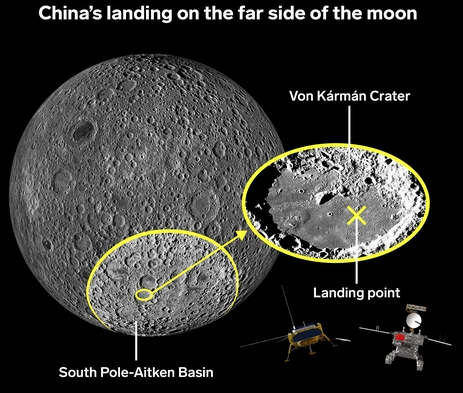
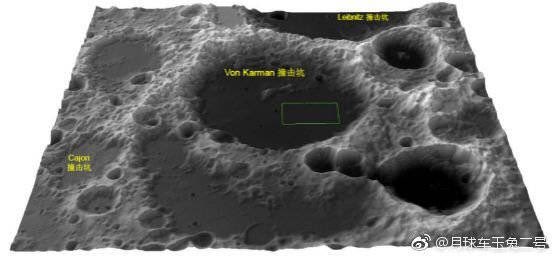
The landing place of the mission "Chang'e-4":
Since the reverse side of the moon also has a more complex relief than the side visible from the earth, the Yuuta-2 rover ran into more serious motor problems and interferences when moving along its surface than its predecessor, the rover Yuytu ”, sent to the lunar surface in December 2013.
Unfortunately, the first Yutu rover of the Chang'e-3 mission, on January 25, 2014, was technically immobilized (crash of the elements as a result of a collision) after overcoming 114.8 meters on a complex lunar surface.
The lunar surface in the landing zone of the Chang'e-4 landing module is replete with folds, numerous pebbles and small craters. After completing each small movement, the Yuuta-2 rover should stop, take a picture of the surface around and send this data back to Earth via satellite repeater.
Scientists, operators at the MCC, and engineers on Earth then process this data and schedule a further route that the Yuuta-2 rover will follow.
Antennas of the Yuuta-2 rover must be configured so that they point to the satellite repeater in order to correctly send and receive control signals, while the rover’s solar panels must be optimally tilted to get a lot of sunlight in order to maximize electricity at the time of the transfer of data.

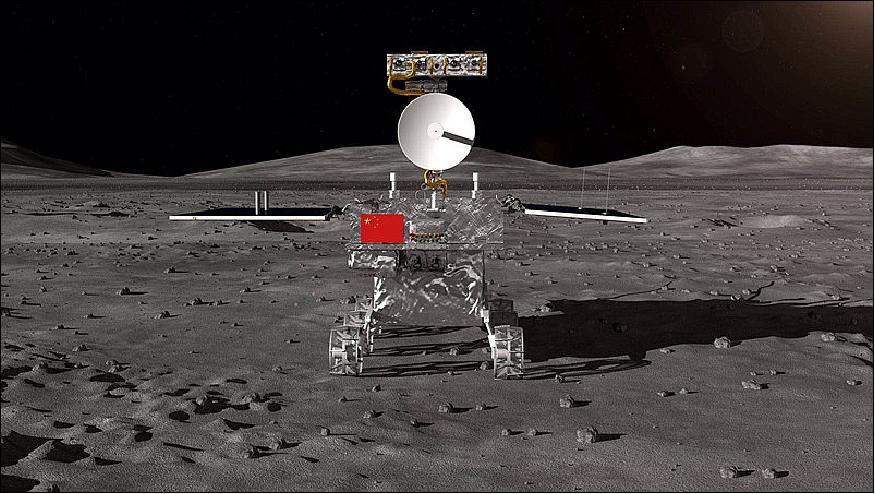
Six-wheeled Rover "Yuytu-2":
- the total mass of the rover is about 140 kg (310 pounds);
- capacity - about 20 kg (44 lbs);
- can move on slopes and has automatic sensors that prevent collisions with other objects;
- electricity rover is provided with two solar panels, allowing the rover to work during the lunar day;
- the maximum speed of 200 meters per hour (this speed on the Moon will not be reached anyway, since the elements on the surface will not allow acceleration and will destroy the rover earlier);
- The maximum study area is 3 square meters. km;
- estimated time of work - 3 months (2160 hours);
- The maximum estimated distance is 10 km.
The wheel elements of the Yuytu-2 rover are indeed its complex design feature, which at the design stage had to be refined for a long time by engineers at the Chinese Academy of Space Technology. They refused to use the tracks because they were less maintainable and vulnerable on tests.
For example, if a small stone gets inside the caterpillar mechanism, the rover can get stuck and lose its course. Unlike wheeled sales, which is more reliable and has an increased resource, and can also safely move stones up to 20 centimeters high.

However, if the “Yuuta-2” rover overturns, then it will not be able to return to the working position again. Solar panels on the sides of the lunar rover are very fragile, they can crack or become covered with dust after a fall, which will make them unusable.

Thus, in the process of remote control, rovers need to focus on keeping the position of the “Yuuta-2” rover as stable as possible and not allowing it to fall when moving along the surface.
But what about all these cameras on the landing module "Chang'e-4" and the rover "Yuytu-2" are controlled, transmit data and receive power?
Pro onboard controllers and power supply system of the landing module and rover.
The landing module "Chang'e-4" and the rover "Yuytu-2" have on board special payload controllers that are used to receive, store and monitor scientific data from different modules and components of the devices.
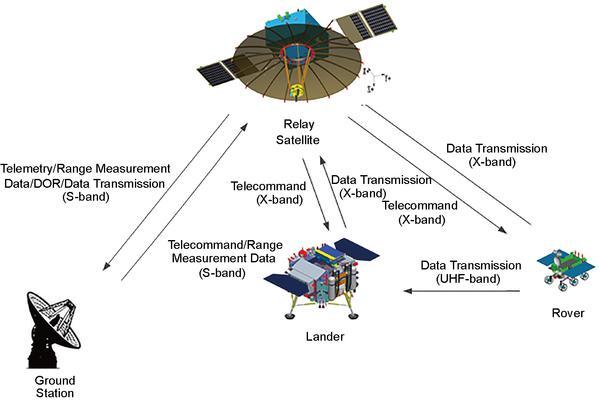
Further, control signal data, scientific and photo data are transmitted via RS-422 interfaces (telemetry and control) and LVDS (scientific data) to the central controllers of the boarding module and the rover, which are transmitted through the communication system to the MCC on Earth using satellite transceiver "Tseyutsyao."
The payload controllers of the Chang'e-4 landing module and the Yuuta-2 rover are equipped with a central processor and FPGA arrays (FPGA).
Also, using the elements of the payload controller, the onboard voltage of + 28V is converted to the voltage for the secondary power sources of + 5V, + -15V, + 3.3V, as well as constant monitoring of the voltage and temperature values of the controller modules and external devices.
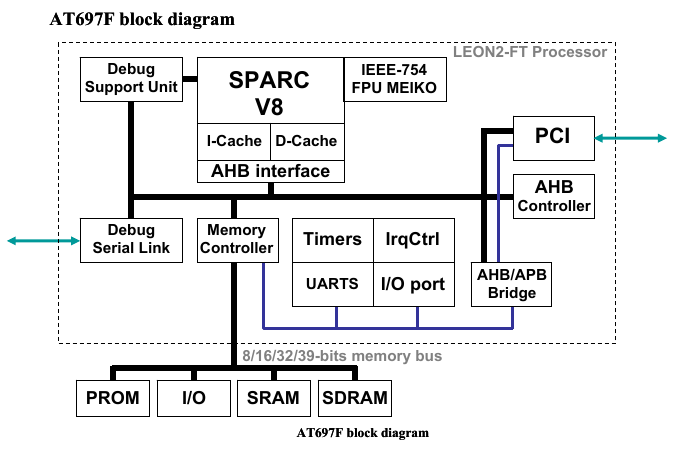
The microprocessor used is: ATMEL AT697F (Rad-Hard 32 bit SPARC V8 Processor).
As programmable logic integrated circuits (FPGA / FPGA) are used: an array of six XILINX XQR2V3000-4CCG717 (Radiation-Hardened QPro Virtex-II FPGA).
For additional protection of the microcircuits against radiation, aluminum screens with a minimum thickness of 3.8 mm are used.
Communication and data transmission schemes of equipment at the Chang'e-4 boarding module:
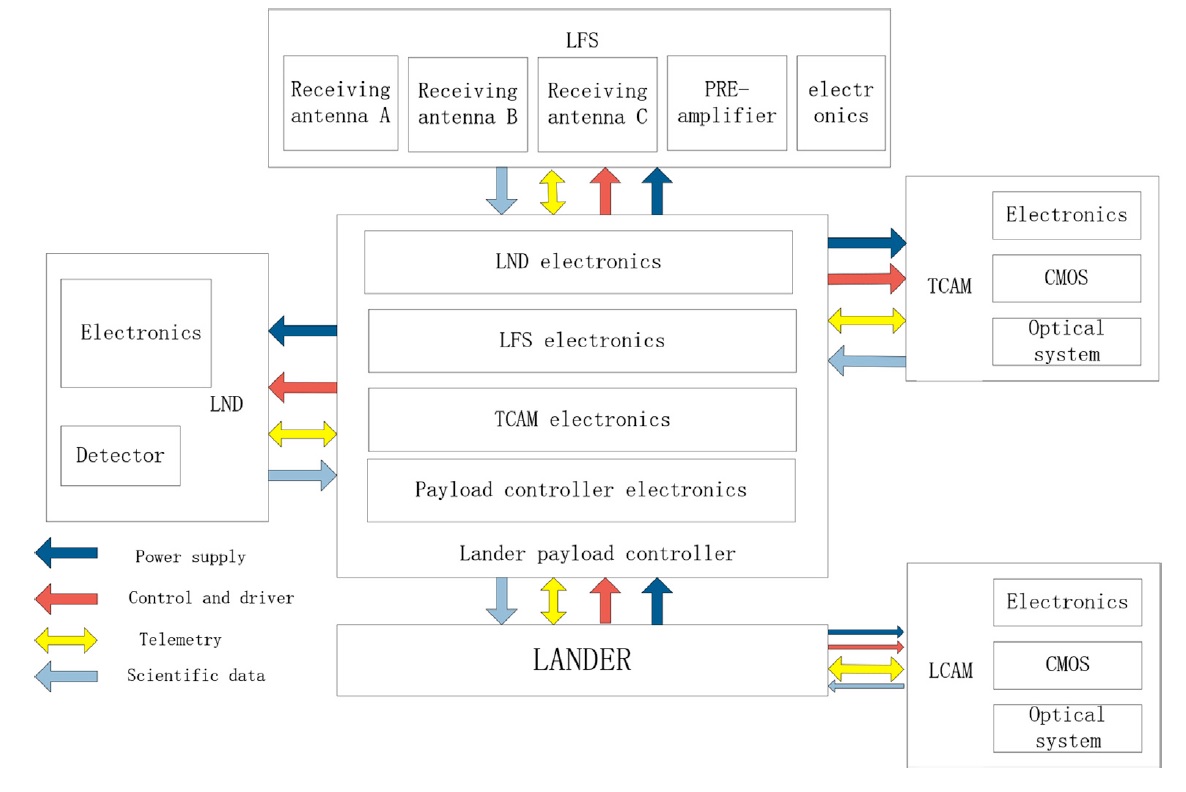
Where:
- LFS - Low Frequency Spectrometer;
- LND - Lunar Lander Neutrons and Dosimetry;
- TCAM - Terrain Camera;
- LCAM - Landing Camera.
Communication schemes and data transmission equipment on the rover "Yuuta-2":
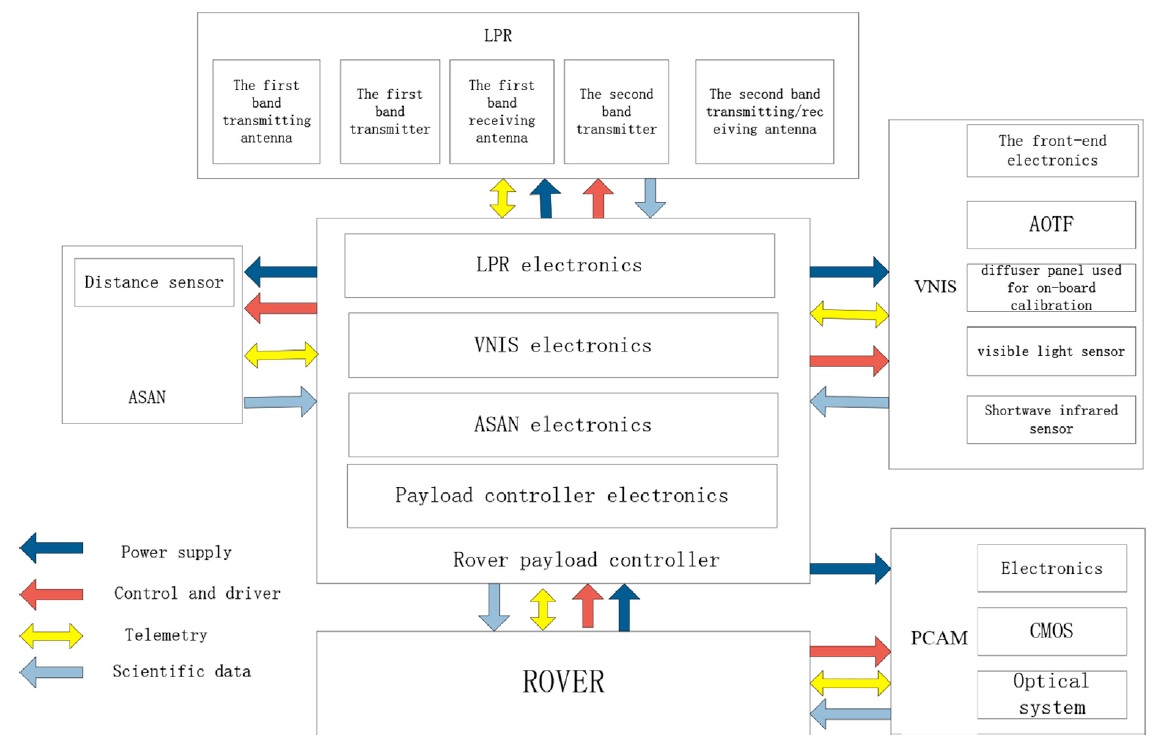
Where:
- LPR - Lunar Penetrating Radar;
- ASAN - Advanced Small Analyzer for Neutrals;
- VNIS - Visible and Near-Infrared Imaging Spectrometer;
- PCAM - Panoramic Camera.
By the way, earlier in publications already told about almost all the scientific equipment of the descent module and the rover , only one scientific device remained incognito - LPR (Lunar penetrating radar) - which can be seen externally as two “antennae” on the back of the rover.
I will try to write a separate publication about this interesting device.
Source: https://habr.com/ru/post/446276/
All Articles