How are robots created that can pass in the same place as we
To benefit people, robots need to learn to walk just like we do.

Robots have been able to walk on two legs for many decades. Today, the most advanced humanoid robots can walk on flat and inclined surfaces, ascend and descend the steps and wade through rough terrain. Some even know how to jump. But, despite this progress, the robots with legs still cannot compare in terms of dexterity, efficiency and reliability with people and animals.
Existing walking robots eat energy and spend too much time on training. Too often they fail and break. To become the robotic assistants we dreamed of for so long, these machines will have to learn to walk like us.
')
We definitely need to create robots with legs, because our world is designed for legs. We go through bottlenecks, we go around obstacles, we go up and down stairs. It is difficult for robots on wheels or caterpillars to move around in places that we have adapted for our bodies.
And many humanoid robots really have legs that look like ours - with hips, knees, ankles, and feet. But that's where the similarities end. If, for example, to compare the force with which the robot presses on the ground, with the same in humans, it turns out that they often differ greatly. Most of the humanoid robots, originating from early examples of industrial robotic grippers, control the limbs so that they move along specified trajectories. However, moving on two legs requires not so much control of position as control of force, and implies a large range of flexibility and elasticity - known in robotics, as compliance [compliance] - which allows to cope with unexpected contacts.
Many research groups are trying to create less rigid robots capable of moving in a more dynamic, human-like manner. The most famous among such projects will probably be Atlas from Boston Dynamics , a humanoid who can run on hard and soft soil, jump over logs and even do back flips. But again, comparing the movement of the most complex robots with animals, we see that the machines do not reach out.
What are we missing? Technology is not the biggest problem: the motors are powerful enough, the materials are strong enough, the computers are fast enough. The limitation seems to be our understanding of how walking works.
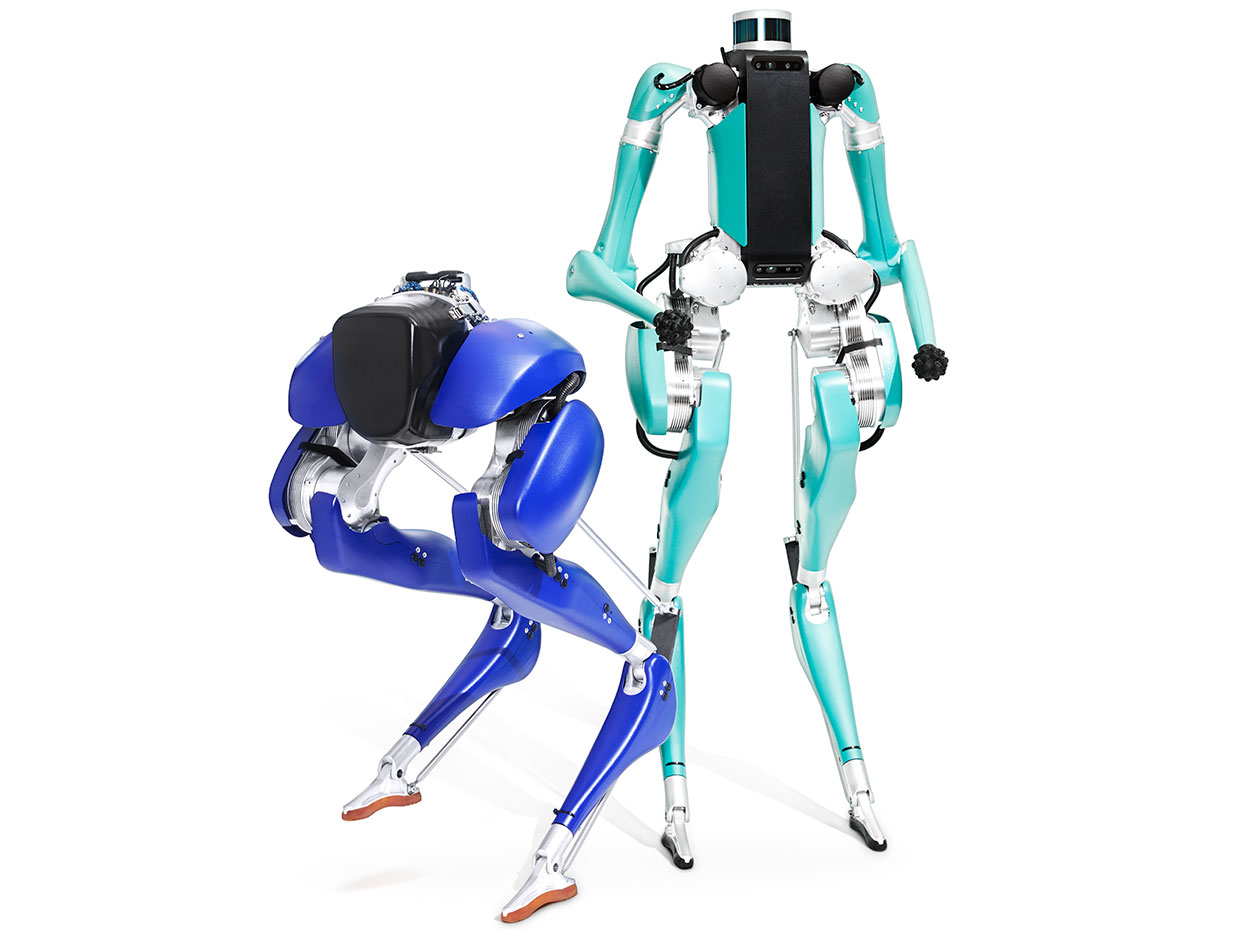
Cassie's robots (left) and Digit from Agility Robotics
In the Dynamic Robotics Laboratory at the University of Oregon, I led a team of researchers who tried to understand the basic principles of walking and apply these discoveries to robots. I am also a co-founder and technology director of Agility Robotics , a startup located in Albany (Oregon), studying the commercial use of walking robots. In 2017, we opened the world to Cassie, a two-legged platform that we sold to several research teams. Soon our new robot will be able to go out into the world: Digit has legs that are similar to Cassie’s feet, but he has sensors and a pair of hands, which he uses to stabilize, and in the future - for manipulation.
Both in the laboratory and in the company, we are working to create a future in which robots can go wherever people can. I believe that dynamic robots will someday be able to help care for elderly people in their home, participate in rescue operations for fires and earthquakes, and deliver packages to their homes. Footed robots will also create exoskeletons and prostheses that will help increase the mobility of people with disabilities. They will finally bring robots from science fiction into reality.
Some birds run better than they fly, or even don't fly at all. Ostriches, turkeys, guinea fowls and quails can not soar like a hawk, but quickly move on foot. My colleagues from the lab and Monica Daily from the Royal Veterinary College at the University of London spent countless hours watching birds walk and run around the lab. We want to understand how these animals are able to move so quickly and efficiently - and in fact most of these feathered machines work on seeds!
In one experiment, a guinea fowl runs along a path, and then steps into a pit disguised with a piece of napkin. The animal did not know that it would come into a hole about half the length of its foot, but it did not stumble, and its foot stretched out and adapted itself to the indentation on the run. In this process, something remarkable happens: the bird's brain does not need to feel and react to the disturbance, since its legs can cope with it themselves.
This gives an important idea for robot developers: if you first create a robot, and then decide to program it for deft movements, you will fail. As in the case of the guinea fowl, the dexterity of the robot for the most part will stem from the mechanical properties of its body, from what robotics call passive dynamics. And it is neglected in most projects for the development of robots with legs. Carefully developing the passive dynamics of the robot in parallel with the software filling, reducing them to an integrated system, you increase the chances of the appearance of the robot, approaching the characteristics of the animal.
It is worth noting that, although we draw inspiration from animals, we do not reproduce the shape of the foot of the bird or the construction of muscles and bones in the human foot. We want to understand the physics of the movement of animals and derive from it an abstract mathematical model that can be understood, tested in computer simulations, and implemented in real robots. Since we use metal and electronics to create robots instead of bones and brains, they can be very different from animals, using the same physics.
One of the simplest mathematical models describes a point mass (body) connected to a pair of ideal springs (legs). This spring-mass model is, of course, simplified; it resembles a dash man and does not take into account the presence of joints at the feet, or that the feet do not touch the ground at isolated points. Still, the spring-mass model can produce unexpected results. In simulations, she can reproduce almost all the gaits that people and animals use for striding and running.

First steps: ATRIAS’s legs are not human, but it was the first car to show a walk that looked like a human
To test the spring-to-mass model, we developed the ATRIAS bipedal robot, whose name is an acronym of our basic assumption: Assume The Robot Is A Sphere [imagine that the robot is a sphere]. The idea was that the passive dynamics of the robot can as accurately as possible recreate the point-like model with spring legs.
Each leg is made of lightweight carbon-fiber rods assembled into a parallelogram, known as a hinged four-hinge. This structure minimizes the mass of the legs and their inertia, bringing the system closer to the spring-to-mass model. We equipped the upper part of the legs with fiberglass springs, physically realizing the “spring” of the model, treating collisions with the ground and storing mechanical energy.
At first, ATRIAS could barely stand, and we supported him with the top leash. But we improved the controller that tracks the speed and tilt of the body, and the robot first began to take the first steps, and then walk freely in the laboratory. Then ATRIAS learned to recover from disturbances - in one of the experiments my students threw balls at him. We also drove ATRIAS to a university football field, sped it up to a maximum speed of 7.6 km / h, and then quickly stopped.
To better understand what the robot was doing, imagine that you are blindfolded, you walk on stilts, and your torso is wrapped in a carpet, and you cannot use your hands for balancing. You can only go further - this was done by ATRIAS. He could even cope with obstacles, for example, with a bunch of firewood on the way.
And, although agility was an important component, it was also very important to use energy economically. We confirmed the profitability of the robot by measuring a parameter known as the cost of transport (COT). It is defined as the ratio of energy consumption (power) to the product of weight and speed, and is used to compare the energy efficiency of moving animals and machines. The lower the COT, the better. For a walking person, the COT is 0.2, and for an ordinary humanoid robot, this figure is much higher - from 2 to 3, according to some estimates . Our experiments showed that ATRIAS in walking mode has COT equal to 1.13, which demonstrates the effectiveness of dynamic robots. In fact, powered by several lithium-polymer batteries - such as those used in radio controllers - ATRIAS could work for about an hour.
We also measured the force with which the robot puts pressure on the ground. We put the ATRIAS weighing 72.5 kg (approximately as an average person) on a power platform - this tool is often used in sports medicine to assess a person’s gait through the measurement of reaction forces. When walking the robot, we recorded the data on the forces. Then ATRIAS took one of my students, and we recorded his steps. Having plotted the dependence of the support reaction over time, we saw that it exactly coincides with the robot's schedule. As far as we know, this is the most realistic implementation of the dynamics of human gait in robots today.
The results confirmed that a simple dynamic spring-mass system can be realized in a robot. It has many useful properties, such as efficiency, reliability and flexibility, and gets to the heart of the walk. It's time to create the next robot.
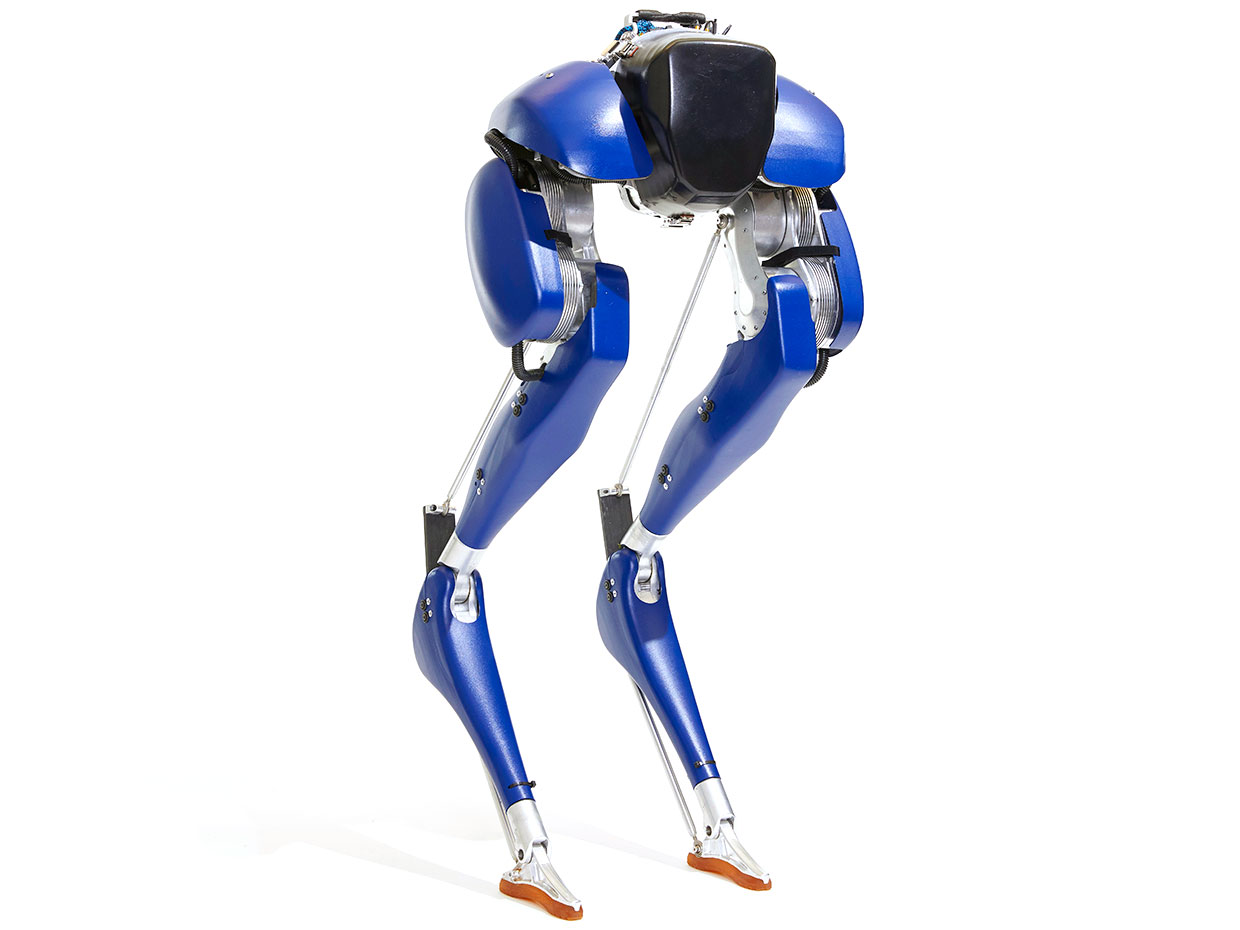
Cassie uses five engines and two springs on each leg to move around in difficult terrain.
Cassie, like ATRIAS, is a dynamic walking robot. We have optimized all aspects of its design in order to create a reliable and capable robot suitable for commercialization. And we set the bar high: we wanted Cassie to run through the woods, walk over rough terrain and work for several hours from the battery without supporting suspension.
Cassie is based on the same concepts that were used for ATRIAS, but we decided to make her completely new legs. Previously, we used two motors to power each four-barter on each leg. This scheme minimizes their mass, but there is a drawback: while walking, one motor braked the other, which led to energy losses. When working on Cassie, we studied other leg configurations to eliminate this effect. The new scheme allows you to make the motors smaller, and the robot has become even more efficient than ATRIAS.
It is important to note that the configuration of Cassie's legs was the result of this analysis. The fact that the leg resembles the leg of an ostrich or another theropod may indicate that we are on the right path, but we did not seek to create a robot that, after covering with its plumage, could be lost in an emu pack.
Each Cassie leg has five axes of motion — or degrees of freedom, speaking robotically — and each has its own motor. The hips have three degrees of freedom, like ours, which allows the leg to turn in any direction. The other two engines have axes in the knee and in the foot. Cassie has additional degrees of freedom in the lower leg and ankle; they are passive, and are not controlled by motors, but are attached to springs, which allows the robot to move through difficult terrain that is not subject to flatfoot humanoids.
Cassie's new legs demanded a more sophisticated low-level controller than ATRIAS had. ATRIAS stretched the leg, simply applying equal torque and opposite torques from both motors. For Cassie, moving a leg in a certain direction requires calculating different torques for different motors. To do this, the controller must take into account the inertia of the legs and the dynamics of the engines and gearboxes.
Controller Cassie uses scheduled steps and dynamic balancing.
Yes, the task of the controller has become more difficult, but this method allows you to walk more efficiently and use a wider range of behaviors. Cassie can go at speeds up to 5 km / h using one of the first controllers. The power consumption varies from 100 W (standing) to 300 W (in motion), and it can work for 5 hours on a lithium-ion battery. Also, the new legs allow Cassius to tack so that ATRIAS could not. And thanks to the motor in the joint of the foot, it can stand, without the need to constantly move, the way ATRIAS did.
Also, Cassie weighs only 31 kg, two times less than ATRIAS. Two Cassies can be loaded into the trunk of a car in less than a minute. And it is also more reliable: its parts are made of aluminum and carbon fiber, and the protective case of durable plastic acryl-polyvinyl chloride, protects it from collisions and falls.
So far, Cassie does not know how to run through the forest. But we took her outside without insurance, and she walks on the ground, grass, and fallen leaves. Now we are studying the issue of integrating the dynamic behavior of the robot with the planning of movements , which allows it, for example, to climb the steps. We are also working on another opportunity that will make Cassie-type robots more useful: hands-on.
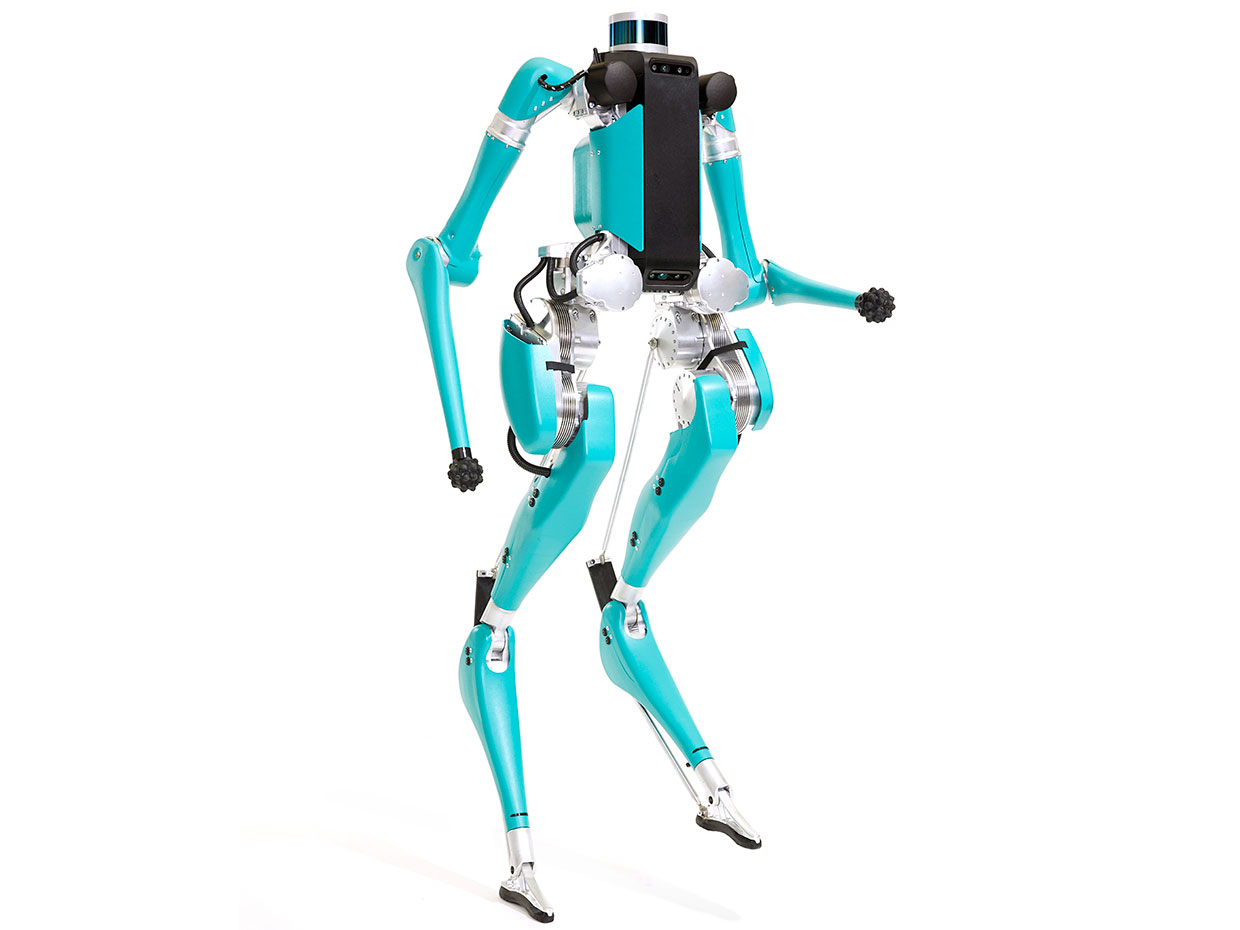
Digit has legs, like Cassie, but he also has a body with sensors inside and a pair of hands that help him with mobility and balance.
Digit is a direct descendant of Cassie. He has similar legs, but we added a torso with sensors inside and a pair of arms. They are specially made to help him with mobility and balance, and swing in accordance with the gait. They also allow Digit to support himself in the fall and reorient his body to stand up.
Digit has something else that Cassie doesn't have: built-in perception. We added many sensors to it, including a lidar in the upper body. Sensors help him to collect data, which allows the robot to move around in a world full of obstacles, for example, in cluttered rooms and stairs, and rely on stable dynamics only in unexpected situations and with sensor errors.
Digit, and the robot with legs, which will appear after him, still have a lot to learn. But we are convinced that they will change the world. Their influence can be compared with cars in terms of changing people's lifestyle, patterns of traffic and city schemes, where these robots promise to transform the logistics and delivery of packages.
In the near future, when ro-mobili will appear, car manufacturers and companies providing joint trips, such as Lyft and Uber, will have their huge fleets of vehicles carrying people, and the maximum traffic will be in peak hours, just like today. But what will these cars do late at night and in the middle of the day? They can not stand idle, and transport parcels from automatic warehouses to your door. However, these cars will be able to get only to the sidewalk - it is quite difficult to deliver the package to the door without a person. And here walking robots come into action. They will drive in such cars and pass the last few meters. And although the wheels and wings can play a part of these roles, in a world meant for two-legs, no other platform for movement will be as flexible as a robot on its feet.
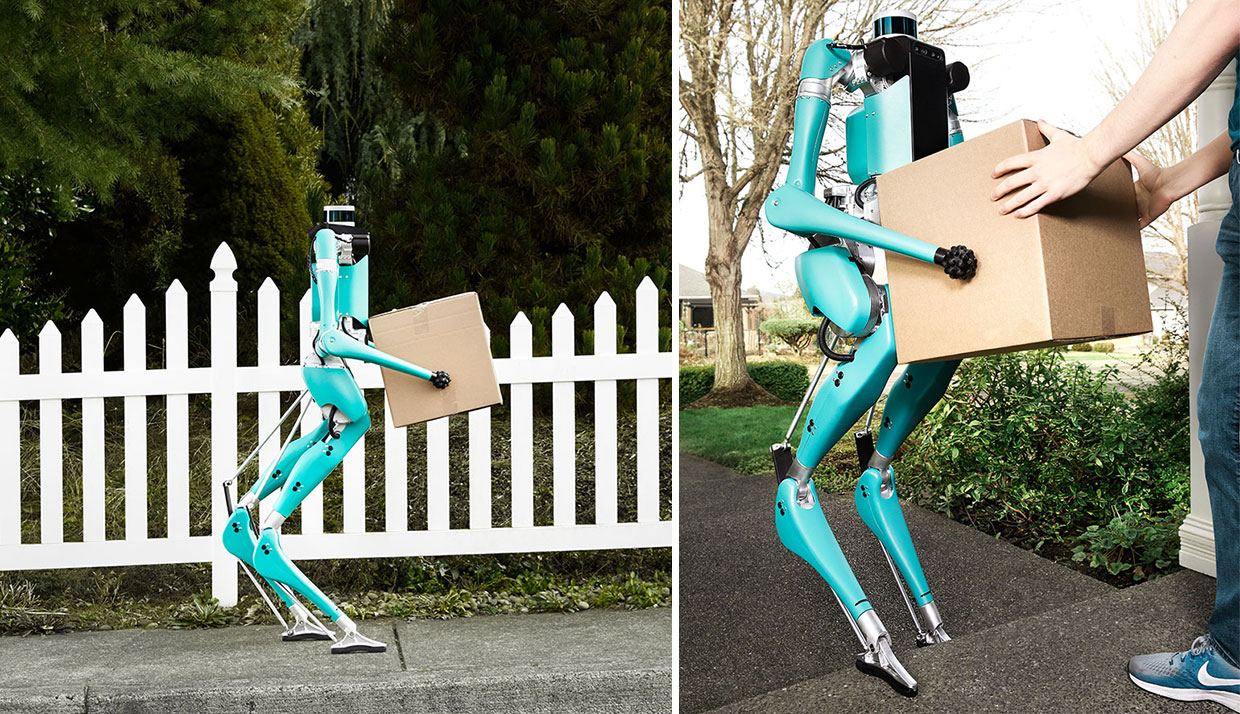
Digit learn to walk in different terrains and climb stairs so that once he can deliver packages right to the door
Delivery robots will be part of an increasingly automated logistics system, where packages from the manufacturer are immediately delivered to your door. This system will reduce the cost of delivery so that it will be cheaper to deliver parcels than to buy them in large, well-lit, heated warehouses with human access. Wholesale stores will become unnecessary. People, of course, will be able to enjoy shopping for some things. But the daily products will be delivered by robots, saving you time and money.
Two-legged robots will be able to penetrate our homes and offices. They can walk the stairs and in the crowded premises, interact with people at a safe eye level and on a human scale, which will allow us to age in our homes. They will help to carry things and will work as devices of remote presence, which will allow family members and friends to use the robot in order to communicate with people remotely and keep them company.
Robots on their feet will be able to make their way to where people are dangerous. They will parachute into forest fires to collect real-time data, flee to burning buildings in search of residents, enter disaster areas such as the Fukushima nuclear power station, and study hard-to-reach areas. They will regularly inspect the internal parts of hydroelectric power stations and abandoned mines so that we do not have to do this.
To get to this future, we need to solve many problems. But I am convinced that the robotics community can make this technology practical. This will be one small step for the robot and a huge leap for all mankind.
Source: https://habr.com/ru/post/445696/
All Articles