BionicSoftHand - safe and flexible robotic arm with artificial intelligence from Festo

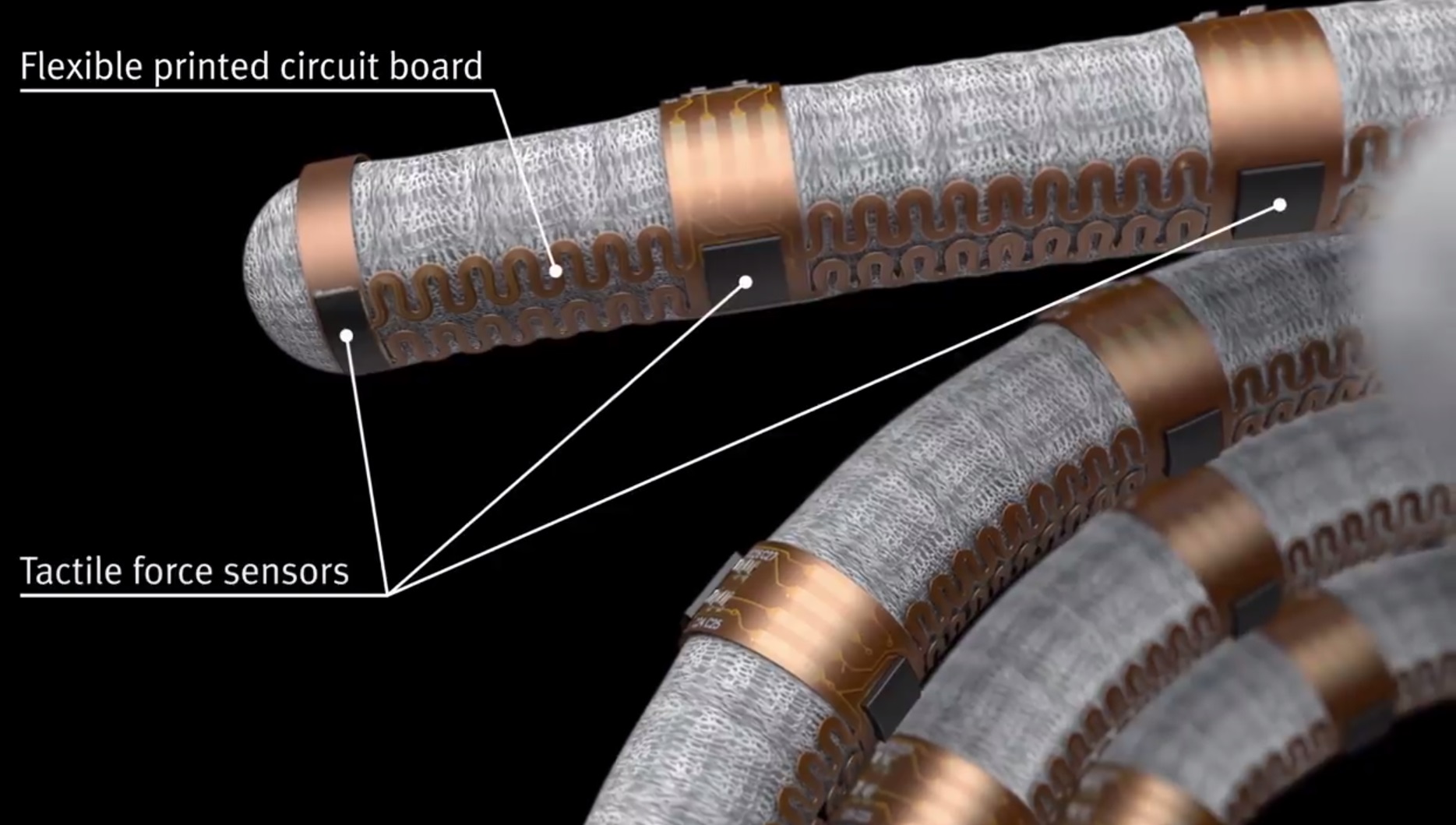
In this solution there is no skeletal structure, the hand is made of soft and flexible materials, the phalanges of the fingers are made of three-dimensional textile fabric with tactile sensors and flexible conductors that can be bent using pneumatic modules. A knot with valves is installed in the wrist, which set the elements of the hand in motion, if necessary, with fine motor movements.
The movements of BionicSoftHand are controlled by artificial intelligence, able to learn by trial and error, and after adapting to the task, quickly and autonomously perform the necessary actions with objects, by analogy with how a person does
')

Link to the description of the manufacturer of the solution BionicSoftHand here .

The BionicSoftHand robotic arm is equipped with:
- inflatable bellows, around which is located a three-dimensional fabric made of elastic fibers created using 3D printing technology, which bends together with hand movements when air is blown into the bellows, similar to the work of muscles and tendons;
- pneumatic rotary modules;
- valve terminal on 24 piezo valve;
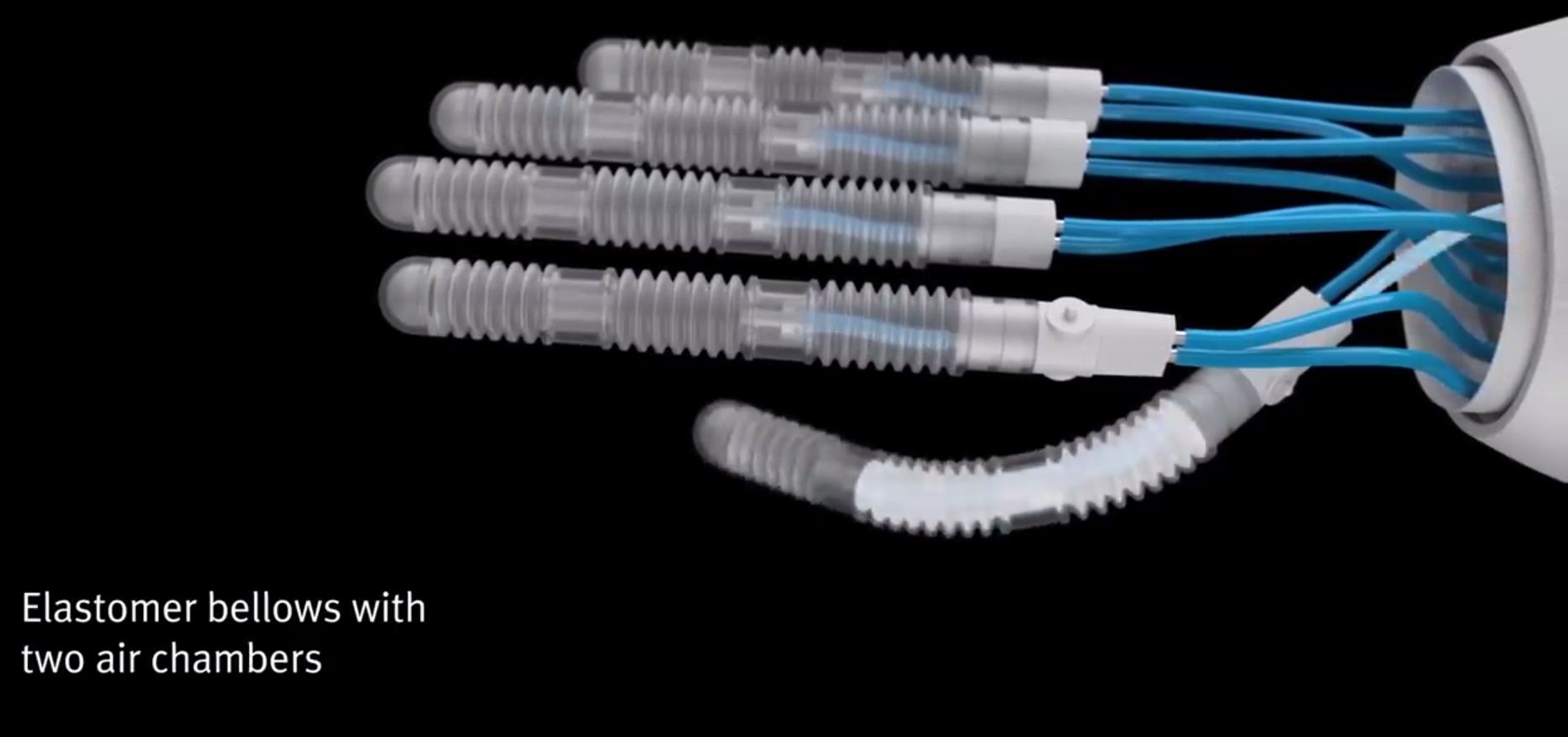
- onboard motherboard, including for autonomous motion control;
- inertia (movement) and force sensors (installed in soft fingers), which are also created on the basis of flexible materials and are able to bend at the moment of movement;
- self-learning module AI, able to independently calculate the best way to interact with different objects and perform different actions, and in the shortest possible time, receiving data from 3D cameras with depth perception for analyzing objects and movements.
Technical characteristics of the device components:
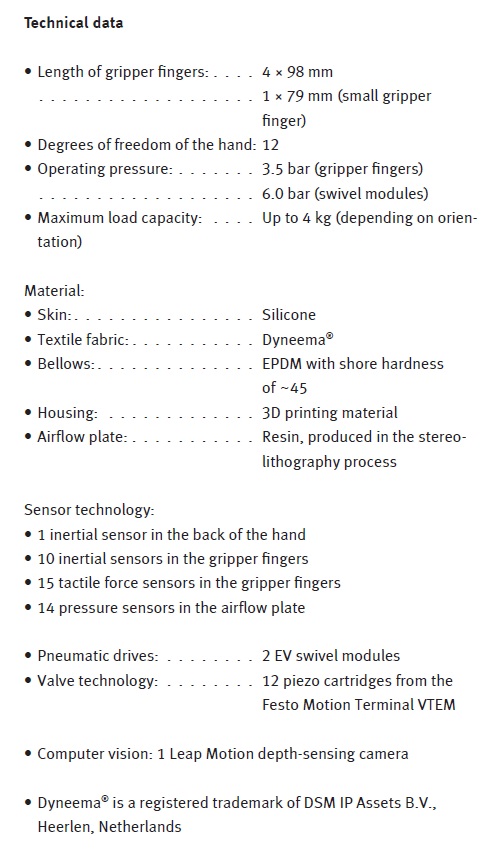







An array of touch sensors on the fingers provides feedback to the hand control systems (with AI components), reporting on the movements of the arm and fingers, as well as methods and movements when in contact with different objects, the AI also analyzes whether the object is located in the hand for its manipulation, using the matrix of contact perception, imitating the sense of touch of a person. Further, the AI calculates what efforts should be made to hold the object, which motor sequence should be performed for the positions and movements of the fingers, how wide the palm should be, and so on.

Initially, the BionicSoftHand arm is not programmed for any specific movements, and the AI connected to its control board is trained in performing test tasks using parallel learning technology, creating in a virtual environment, allowing the robotic arm to become “smarter” over time, and for solutions of new tasks to use previously studied and verified combinations of movements with real actions, which are further optimized for new tasks.

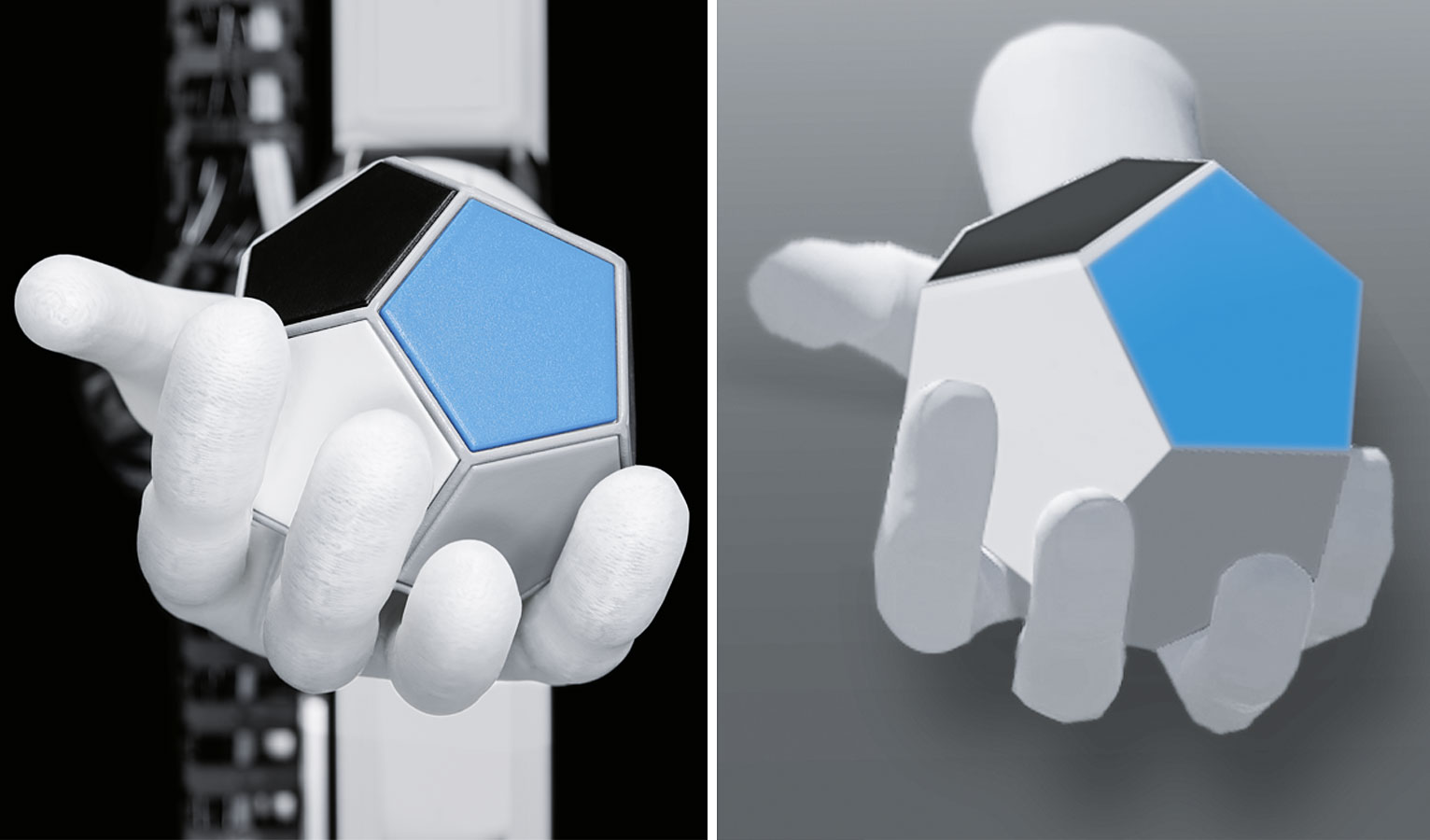

In the demo video below, the AI with a robotic arm was given the task of moving the 12-sided object placed in the arm in such a way that a certain face looked up, without explaining the actions to accomplish this task.
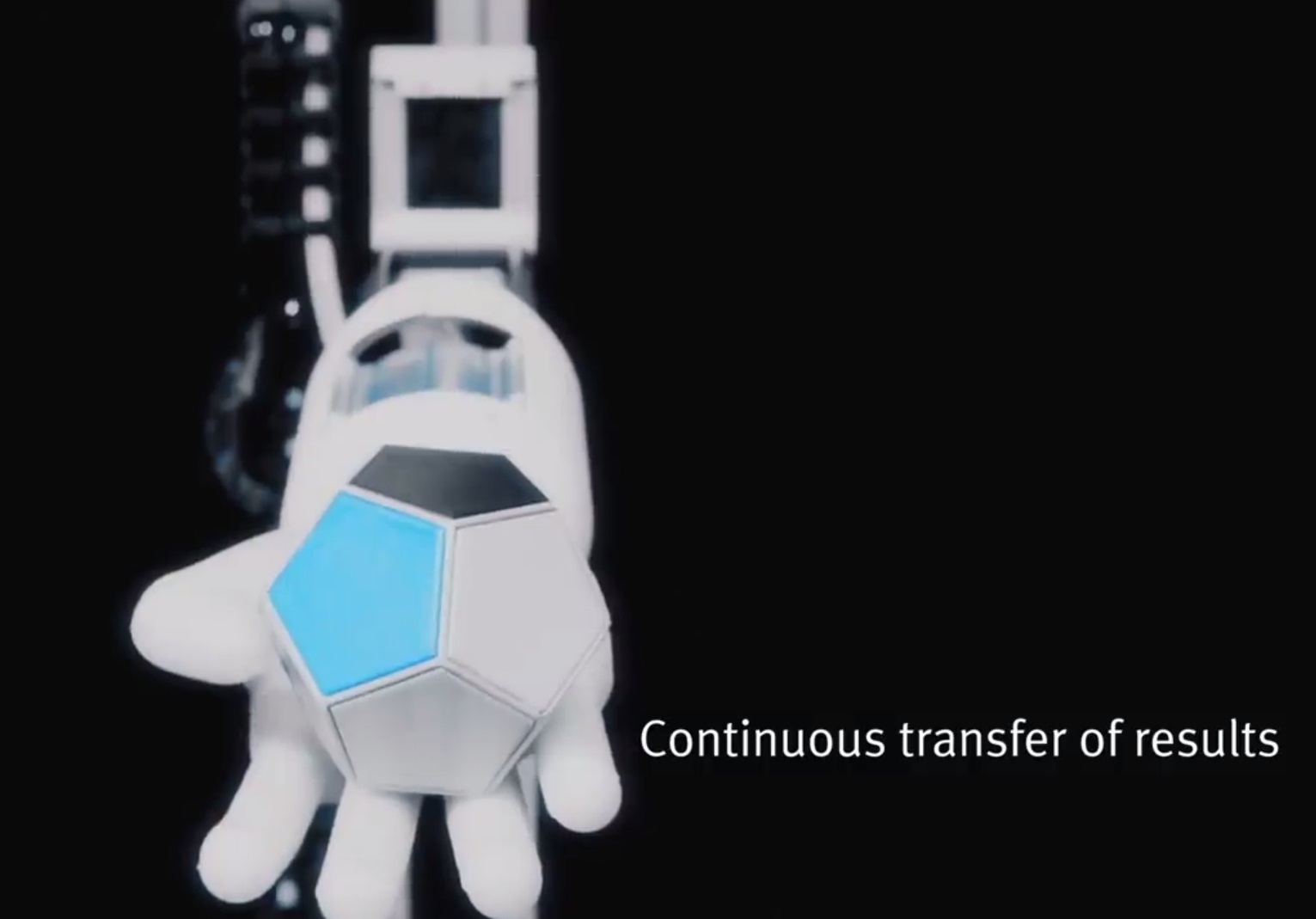
First, using a 3D camera with depth perception, the AI creates a digital copy of the object, and then places it in a virtual simulation with a lot of virtual hands that manipulate the object until the right combination is selected.
Then the AI calculates the options to find and perform quickly optimal actions with the object, and then performs them in reality, controlling the elements of BionicSoftHand.
Components for the creation of Electronics Eugene Veltistova closer and closer to reality.
Source: https://habr.com/ru/post/444148/
All Articles