Kitchen Robotics
Hello, dear members and guests of the site. I will try to be as brief as possible in this topic. The boom of robotics in recent years, great attention to this topic could not leave me indifferent.
Pursuing a childhood dream of making a robot, I came to the cyber-place.ru forum in search of information about a year ago (do not consider it an advertisement). In my wildest fantasies, I was warmed by the idea of creating my own telepresence robot, with the ability to move in space, video and two-way audio communication, with remote control via phone or computer. Inspired by the model based on the tplink 3020 router with Cyberwrt firmware. Not knowing the topic and large gaps in education did not interfere with my manic desire to achieve a result, as a result, the path of trial and error and burnt electronics.
After almost a year of “learning from my mistakes”, the first results appeared, a machine with the ability to control via the Internet based on Cyberbot -3, for which many thanks to its developers, the guys did a really great job! (For me, programming and creating software is just a space!) Many made the machine, the equipment and detailed instructions are on the vast expanses of the Internet. Therefore, to dwell on this I see no point.
')

Further, there was a need for autonomy of the device, built (from improvised means) a “charging station”, secured spring-loaded contacts in front of the robot. The main power of the robot is selected 4.2V for the possibility of charging from the 5V power supply. To increase the charging current, two modules of the TP4056 were soldered in parallel. Managed all this economy through the Internet by phone, through the browser.


Having played enough with the received model, I decided to move on. Unfortunately, I did not find a way (I think that everything is still ahead) to control the device on the basis of one, the main controller.
Since this equipment does not allow to organize two-way audio communication, I did not find a better way out how to use the DS-2CD2432F-IW video surveillance camera, this camera, with the support of third-party software on the android (tinyCam PRO), enables video monitoring and two-way audio. Initially, there was a (crazy) idea to connect to the engineering connector of the camera in order to read the uart, to use the staff software of the camera to control the movement of the robotic trolley. Use PTZ camera to move. I planned to consider which commands fall on uart when pressed left, right, down, up by the camera that is not turning, then these commands drive arduino nano to uart, which had to drive the engines, so I wanted to solve the main problem for myself, not the ability to write soft The idea was not crowned with success; the manufacturer blocked these commands, except for the “ptz not support” message when pressing the PTZ buttons, nothing came into the uart.
Therefore, the “camera on wheels” and not the telepresence robot was the result of my efforts.
To control the device from the phone, I use the ability to open several applications on the android, the so-called "floating windows" (In later versions it works without third-party applications like floating apps). We have to open two applications, tinyCam PRO to access the camera interface and a browser to access the trolley control.
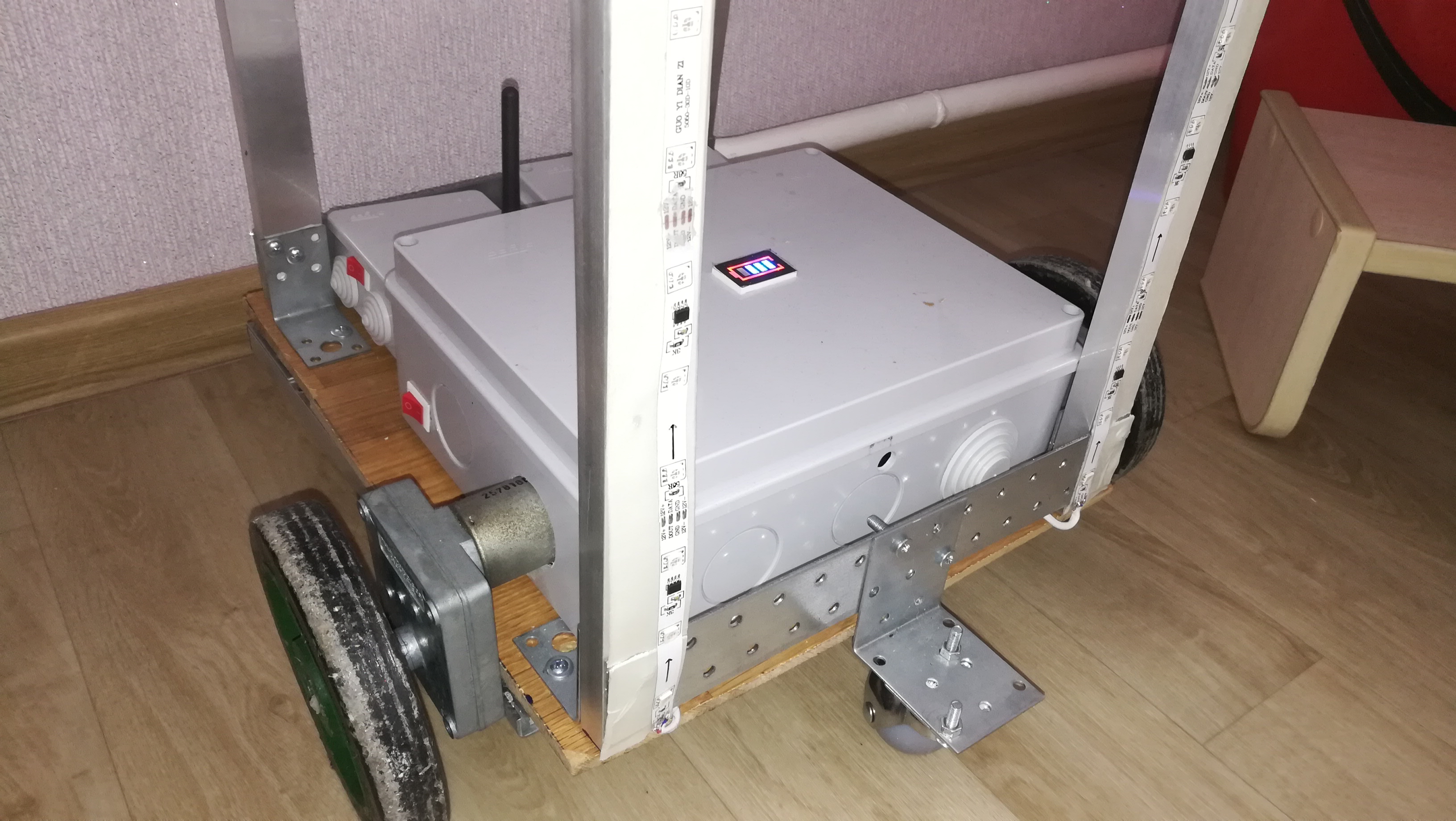
So, the result: an electrical switch box as a box for placing equipment tp link 3020 with CyberWRT firmware, a soldered antenna, + 10 dtsb in my case, an arduino nano receiving commands from the web interface of the router for uart, a monster motor shield for controlling powerful motor gearboxes removed from old slot machines.

The height of the robot is 165cm, weight is about 10 kg, power supply is 12.6V (lithium battery assembly 18650 + charge controller with balance bar), a can from the mayonnaise instead of the head, in which the camera is hidden, the regular camera speaker is replaced with a 5 W column so that I can be heard better . Eyes - two LEDs inserted into the light reflectors from under the lanterns, eyes are controlled from the cyberboot interface, two address LED strips and an additional mini Arduino controller for controlling them (thanks to Alex Guyver, he fired on his project “fiery lamp”).
The tape is controlled through the relay module, on command, also via the cyber-robot interface.
Awkward appearance is due to the fact that the robot has dressed up and congratulate colleagues on March 8. (The robot went to the music from the terminator, controlled by me from a secluded place, confused with light and smoothly turning on the LEDs, the audience was delighted).


In the future, I plan to master the work with the manipulator, remove all the "extra", pick up the necessary equipment (replace the router and arduinku with ESP32) and software so that my grandmother could manage the "design" :)) The topic is not fully disclosed, did not cover many moments so as not to delay and so long post, if you liked the topic, I am waiting for your criticism and advice.
Pursuing a childhood dream of making a robot, I came to the cyber-place.ru forum in search of information about a year ago (do not consider it an advertisement). In my wildest fantasies, I was warmed by the idea of creating my own telepresence robot, with the ability to move in space, video and two-way audio communication, with remote control via phone or computer. Inspired by the model based on the tplink 3020 router with Cyberwrt firmware. Not knowing the topic and large gaps in education did not interfere with my manic desire to achieve a result, as a result, the path of trial and error and burnt electronics.
After almost a year of “learning from my mistakes”, the first results appeared, a machine with the ability to control via the Internet based on Cyberbot -3, for which many thanks to its developers, the guys did a really great job! (For me, programming and creating software is just a space!) Many made the machine, the equipment and detailed instructions are on the vast expanses of the Internet. Therefore, to dwell on this I see no point.
')
Further, there was a need for autonomy of the device, built (from improvised means) a “charging station”, secured spring-loaded contacts in front of the robot. The main power of the robot is selected 4.2V for the possibility of charging from the 5V power supply. To increase the charging current, two modules of the TP4056 were soldered in parallel. Managed all this economy through the Internet by phone, through the browser.
Having played enough with the received model, I decided to move on. Unfortunately, I did not find a way (I think that everything is still ahead) to control the device on the basis of one, the main controller.
Since this equipment does not allow to organize two-way audio communication, I did not find a better way out how to use the DS-2CD2432F-IW video surveillance camera, this camera, with the support of third-party software on the android (tinyCam PRO), enables video monitoring and two-way audio. Initially, there was a (crazy) idea to connect to the engineering connector of the camera in order to read the uart, to use the staff software of the camera to control the movement of the robotic trolley. Use PTZ camera to move. I planned to consider which commands fall on uart when pressed left, right, down, up by the camera that is not turning, then these commands drive arduino nano to uart, which had to drive the engines, so I wanted to solve the main problem for myself, not the ability to write soft The idea was not crowned with success; the manufacturer blocked these commands, except for the “ptz not support” message when pressing the PTZ buttons, nothing came into the uart.
Therefore, the “camera on wheels” and not the telepresence robot was the result of my efforts.
To control the device from the phone, I use the ability to open several applications on the android, the so-called "floating windows" (In later versions it works without third-party applications like floating apps). We have to open two applications, tinyCam PRO to access the camera interface and a browser to access the trolley control.
So, the result: an electrical switch box as a box for placing equipment tp link 3020 with CyberWRT firmware, a soldered antenna, + 10 dtsb in my case, an arduino nano receiving commands from the web interface of the router for uart, a monster motor shield for controlling powerful motor gearboxes removed from old slot machines.
The height of the robot is 165cm, weight is about 10 kg, power supply is 12.6V (lithium battery assembly 18650 + charge controller with balance bar), a can from the mayonnaise instead of the head, in which the camera is hidden, the regular camera speaker is replaced with a 5 W column so that I can be heard better . Eyes - two LEDs inserted into the light reflectors from under the lanterns, eyes are controlled from the cyberboot interface, two address LED strips and an additional mini Arduino controller for controlling them (thanks to Alex Guyver, he fired on his project “fiery lamp”).
The tape is controlled through the relay module, on command, also via the cyber-robot interface.
Awkward appearance is due to the fact that the robot has dressed up and congratulate colleagues on March 8. (The robot went to the music from the terminator, controlled by me from a secluded place, confused with light and smoothly turning on the LEDs, the audience was delighted).
In the future, I plan to master the work with the manipulator, remove all the "extra", pick up the necessary equipment (replace the router and arduinku with ESP32) and software so that my grandmother could manage the "design" :)) The topic is not fully disclosed, did not cover many moments so as not to delay and so long post, if you liked the topic, I am waiting for your criticism and advice.
Source: https://habr.com/ru/post/443332/
All Articles