Mechanized hands and manipulators - we tell what the laboratory of robotics at the University of ITMO does
At the ITMO University, a robotics laboratory has been opened at the Department of Management Systems and Informatics (IMS). We will talk about the projects on which we work within its walls and show the tools: industrial robotic manipulators, robotic gripping devices, as well as an installation for testing dynamic positioning systems using a robotized model of a surface vessel.

The robotics laboratory belongs to the oldest department of ITMO University, which is called “Control Systems and Computer Science”. She appeared in 1945. The laboratory itself was launched in 1955 - then it dealt with the issues of automating measurements and calculating the parameters of surface vessels. Later, the range of areas was expanded: added cybernetics, CAD, as well as robotics.
')
Today in the laboratory are engaged in the improvement of industrial robots. Employees solve issues related to the interaction of humans and machines - develop secure control algorithms with control of the robot power, and also work on collaborative robots that can perform tasks side by side with people.
The laboratory also develops alternative methods of remote control of groups of robots and create software algorithms that can be reconfigured to perform new tasks online.
A number of laboratory robotic systems purchased from large companies and intended for research or industrial purposes. A part of the equipment was manufactured by employees within the framework of research and development work.
Of the latter, we can distinguish the Stewart robotic platform with two degrees of freedom. The academic setup is designed to test control algorithms for holding the ball in the center of the site (the system in action can be viewed in this video ).
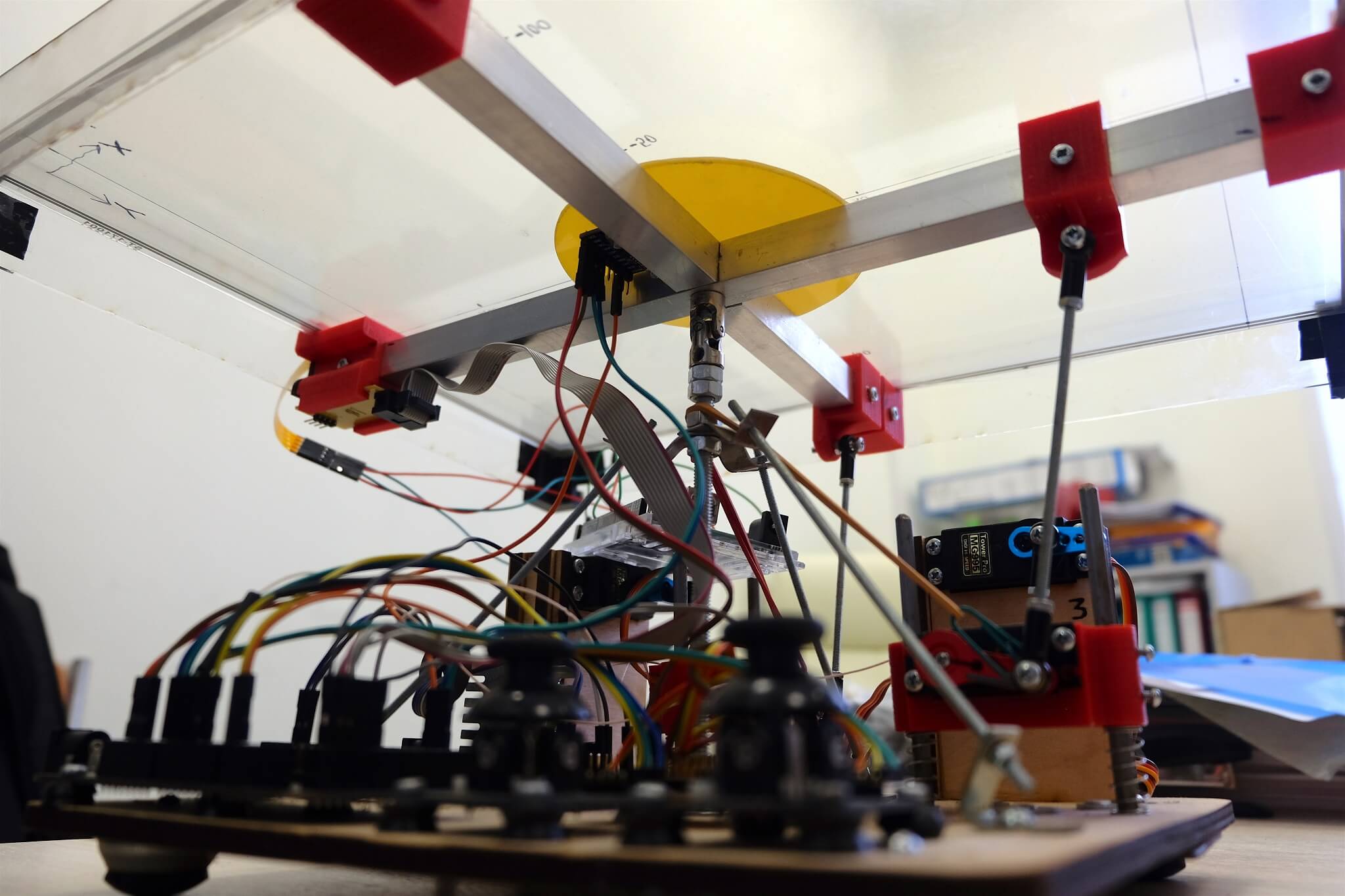
The robotic complex consists of a rectangular platform with a resistive sensory substrate that defines the coordinates of the ball. The drive shafts are attached to it by means of a swivel. These drives change the angle of inclination of the platform according to the control signals received from the computer via USB, and do not allow the ball to roll.
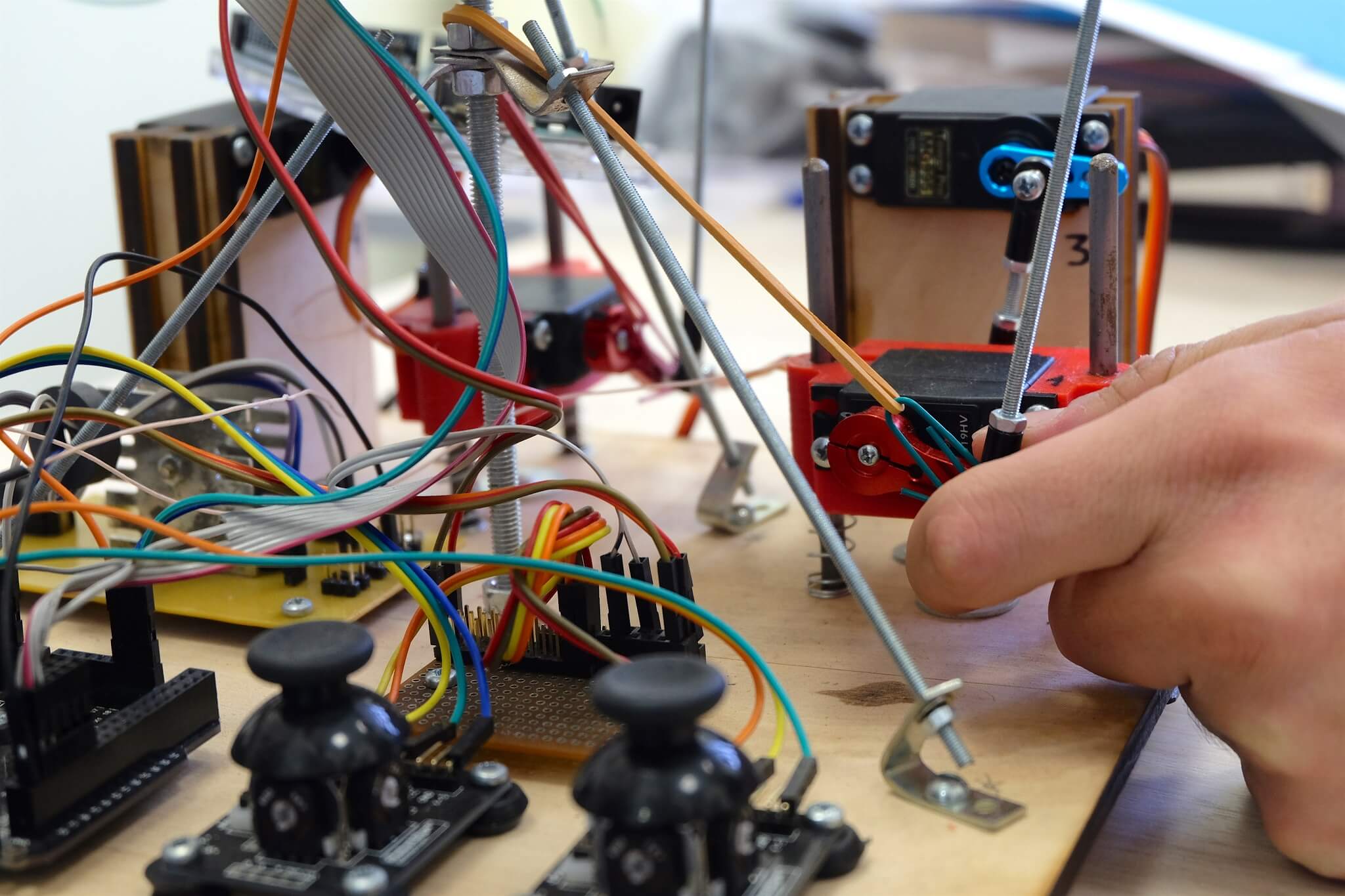
The complex has additional servos, which are responsible for the compensation of disturbances. For the operation of these drives, laboratory staff developed special algorithms that smooth out various kinds of interference, such as vibration or wind.
In addition, the KUKA youBot research facility, which is a five-barred robotic arm mounted on a mobile platform with omnidirectional wheels, is located in the laboratory robots park.

Adaptive control algorithms for tracking a moving target were tested on a KUKA youBot robot. They use a digital camera-based vision system and video processing procedures. The basis of this project is research in the field of adaptive management of nonlinear systems, conducted by the laboratory staff.
The control algorithms are used to compensate for external influences acting on the links of the robot. As a result, the machine is able to hold the working tool at a fixed point in space and move it steadily along a predetermined path.
An example of a project implemented on the basis of the KUKA youBot robot is a sensorless force-moment sensing . Together with the British company TRA Robotics, we developed an algorithm that allows us to estimate the strength of the interaction of the working tool with the environment without costly torque-sensitive sensors. This allowed the robot to perform more complex operations without resorting to external systems.

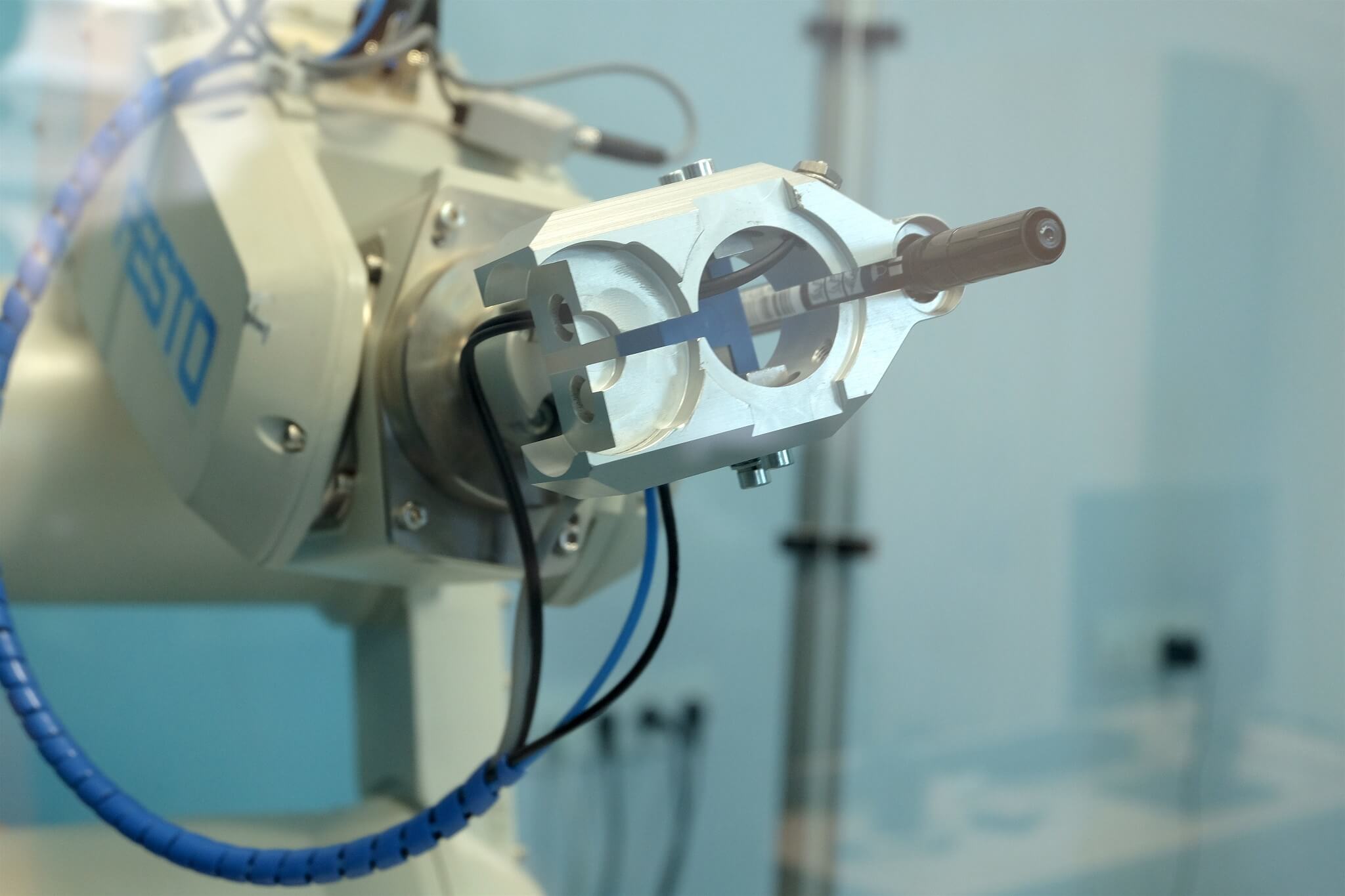
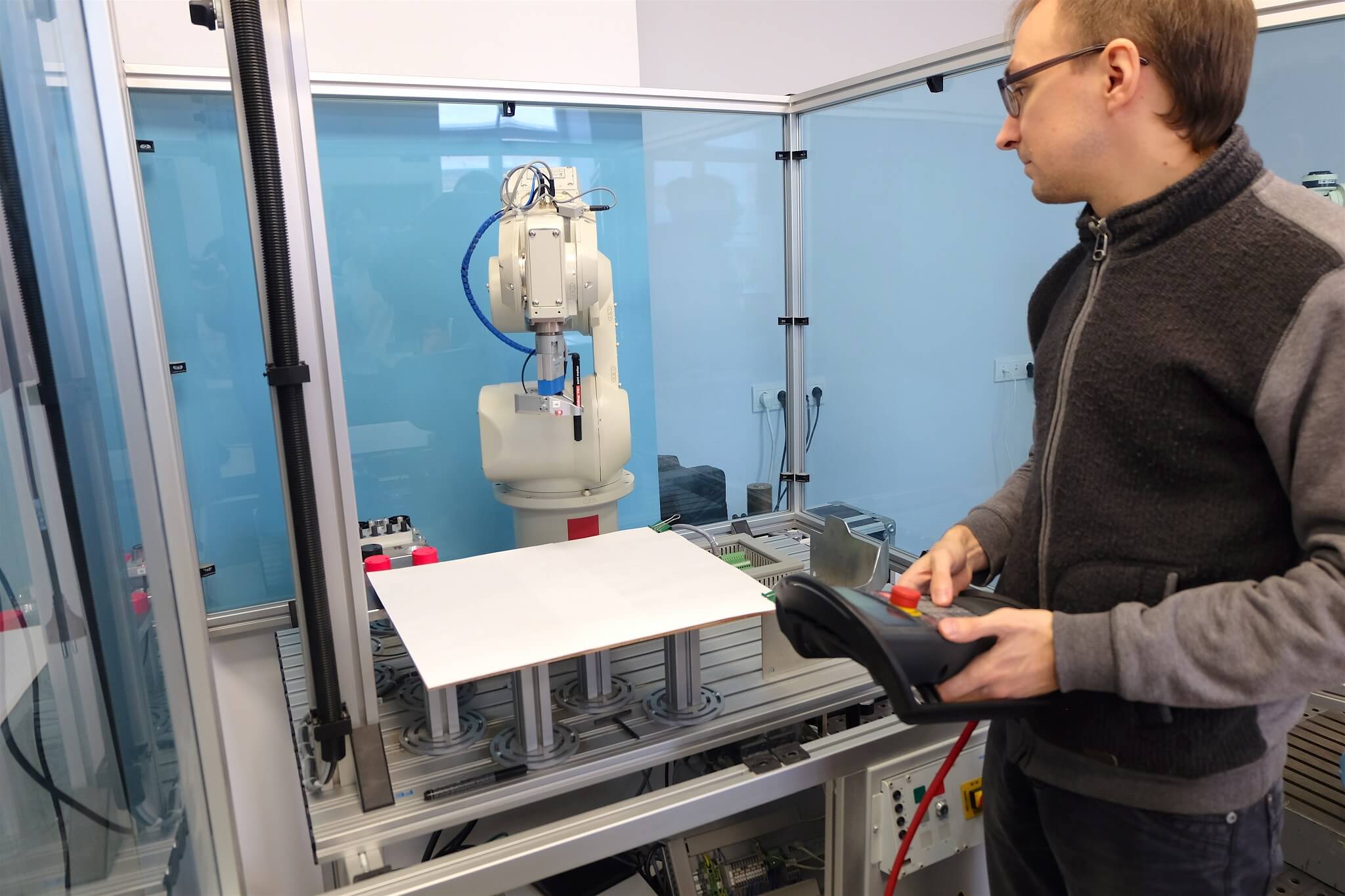
Another example of a robotic installation in a laboratory is the FESTO Robot Vision Cell . This complex is used to simulate technological operations in production, such as welding. To implement such a scenario, the task of motion planning is posed: an imitation welding tool bypasses the contour of the metal part.
In addition, the cell is equipped with a vision system and is able to solve the problem of sorting parts by color or shape.
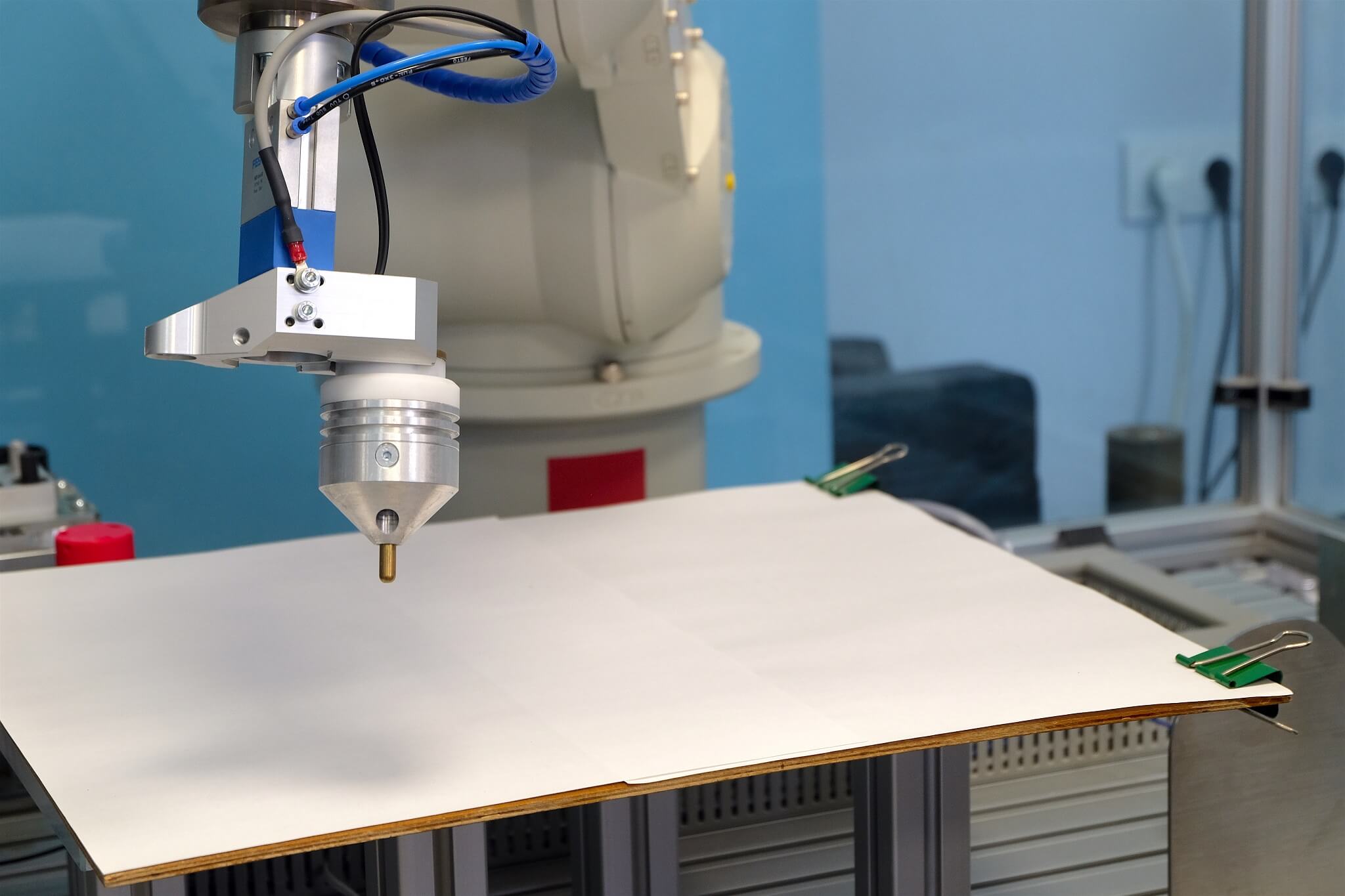
The project, based on the FESTO Robot Vision Cell robotic cell with an industrial Mitsubishi RV-3SDB robot, solves the tasks of motion planning.
It helps to simplify the process of operator interaction with the robot controller when programming complex paths. The idea is to automatically program the movements of the robot tool using the contours depicted in the raster drawing. It is enough to load the file into the system, and the algorithm will independently arrange the necessary reference points and compile the program code.
In practice, the resulting solution can be applied for engraving or drawing.
We have a video on the channel in which our “robot artist” portrayed a portrait of A. S. Pushkin. The technology can also be used for welding parts of complex shape. In fact, it is a robotic complex that solves industrial problems in the laboratory.
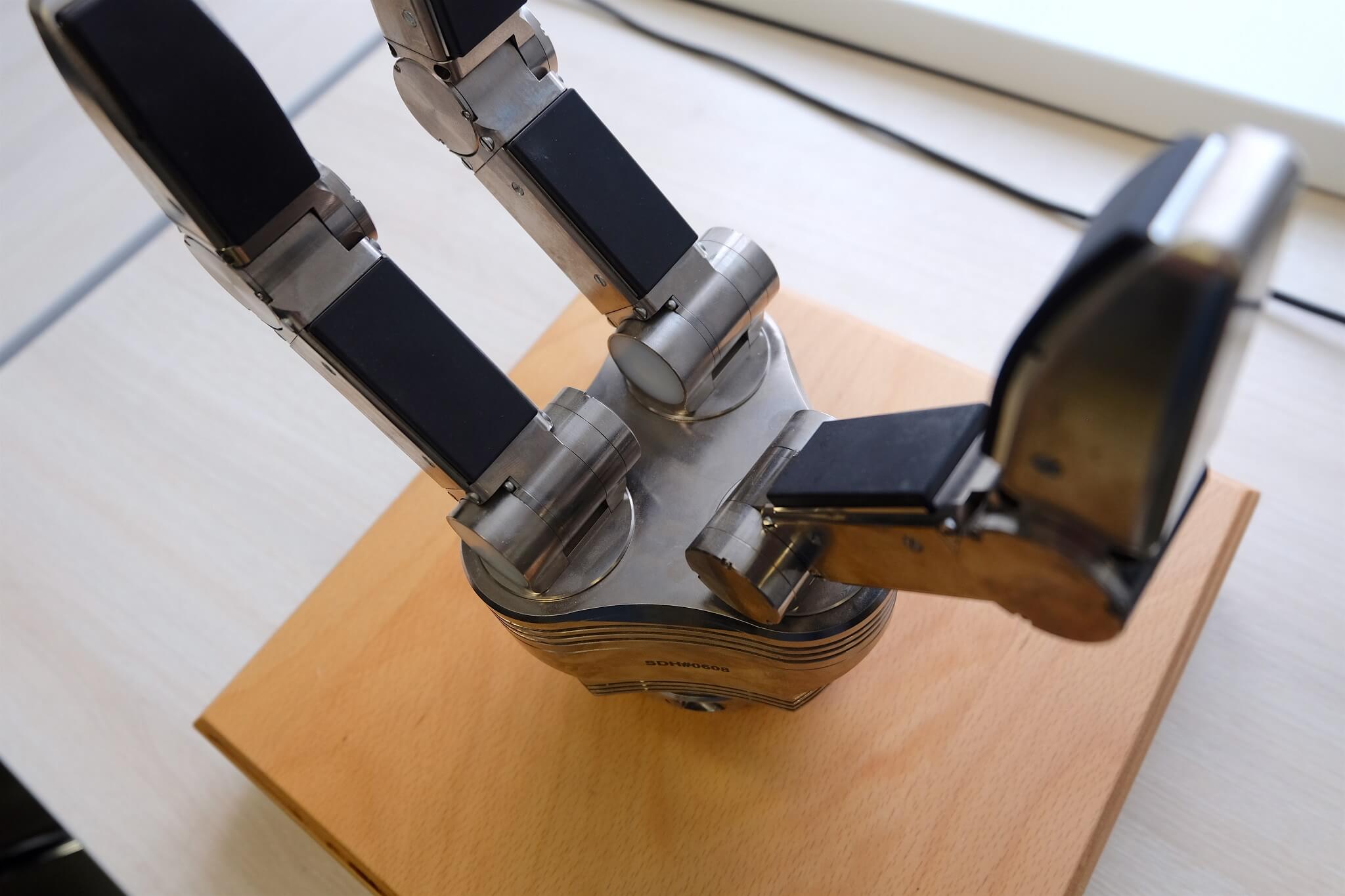
The laboratory also has a three-finger gripping device equipped with pressure sensors located on the inner surface of the fingers.
Such a device allows the manipulation of fragile objects, when it is important to precisely control the gripping force in order to avoid damage.
The laboratory has a robotized model of a surface vessel , which is intended for testing dynamic positioning systems.
The model is equipped with several actuators as well as radio communication hardware for transmitting control signals.

Inside the laboratory there is a pool where the operability of control algorithms to hold the position of a small model of a surface vessel with compensation for longitudinal and transverse displacements is checked.
Currently, it is planned to organize a large basin for large-scale tests with complicated scenarios.

One of our partners is the British company TRA Robotics. Together we are working to improve the control algorithms for industrial robots for the enterprise of digital production. At such an enterprise, the entire production cycle: from development to the manufacture of industrial products, will be performed by robots and AI systems.
Other partners include the Elektropribor concern, with which we develop mechatronic and robotic systems. Our students help employees of the concern in the field of instrument making, software development and production tasks.
We also cooperate with General Motors, develop robotics together with InfoWatch. Also, the laboratory staff closely interact with the company JSC "Navis" , which implements projects for the development of dynamic positioning systems for surface vessels.
On the basis of ITMO University there is a Youth Robotics Laboratory , where students prepare for world-class competitions. For example, in 2017, our team won the World Robot Olympiad in Costa Rica, and in the summer of 2018 our students won two prizes at the All-Russian School Olympiad.
We plan to attract more industry partners and educate the younger generation of Russian scientists. Perhaps it is they who will develop such robots that will organically complement the world of people and will perform more routine and dangerous tasks in enterprises.
Specialization
The robotics laboratory belongs to the oldest department of ITMO University, which is called “Control Systems and Computer Science”. She appeared in 1945. The laboratory itself was launched in 1955 - then it dealt with the issues of automating measurements and calculating the parameters of surface vessels. Later, the range of areas was expanded: added cybernetics, CAD, as well as robotics.
')
Today in the laboratory are engaged in the improvement of industrial robots. Employees solve issues related to the interaction of humans and machines - develop secure control algorithms with control of the robot power, and also work on collaborative robots that can perform tasks side by side with people.
The laboratory also develops alternative methods of remote control of groups of robots and create software algorithms that can be reconfigured to perform new tasks online.
Projects
A number of laboratory robotic systems purchased from large companies and intended for research or industrial purposes. A part of the equipment was manufactured by employees within the framework of research and development work.
Of the latter, we can distinguish the Stewart robotic platform with two degrees of freedom. The academic setup is designed to test control algorithms for holding the ball in the center of the site (the system in action can be viewed in this video ).
The robotic complex consists of a rectangular platform with a resistive sensory substrate that defines the coordinates of the ball. The drive shafts are attached to it by means of a swivel. These drives change the angle of inclination of the platform according to the control signals received from the computer via USB, and do not allow the ball to roll.
The complex has additional servos, which are responsible for the compensation of disturbances. For the operation of these drives, laboratory staff developed special algorithms that smooth out various kinds of interference, such as vibration or wind.
In addition, the KUKA youBot research facility, which is a five-barred robotic arm mounted on a mobile platform with omnidirectional wheels, is located in the laboratory robots park.
Adaptive control algorithms for tracking a moving target were tested on a KUKA youBot robot. They use a digital camera-based vision system and video processing procedures. The basis of this project is research in the field of adaptive management of nonlinear systems, conducted by the laboratory staff.
The control algorithms are used to compensate for external influences acting on the links of the robot. As a result, the machine is able to hold the working tool at a fixed point in space and move it steadily along a predetermined path.
An example of a project implemented on the basis of the KUKA youBot robot is a sensorless force-moment sensing . Together with the British company TRA Robotics, we developed an algorithm that allows us to estimate the strength of the interaction of the working tool with the environment without costly torque-sensitive sensors. This allowed the robot to perform more complex operations without resorting to external systems.
Another example of a robotic installation in a laboratory is the FESTO Robot Vision Cell . This complex is used to simulate technological operations in production, such as welding. To implement such a scenario, the task of motion planning is posed: an imitation welding tool bypasses the contour of the metal part.
In addition, the cell is equipped with a vision system and is able to solve the problem of sorting parts by color or shape.
The project, based on the FESTO Robot Vision Cell robotic cell with an industrial Mitsubishi RV-3SDB robot, solves the tasks of motion planning.
It helps to simplify the process of operator interaction with the robot controller when programming complex paths. The idea is to automatically program the movements of the robot tool using the contours depicted in the raster drawing. It is enough to load the file into the system, and the algorithm will independently arrange the necessary reference points and compile the program code.
In practice, the resulting solution can be applied for engraving or drawing.
We have a video on the channel in which our “robot artist” portrayed a portrait of A. S. Pushkin. The technology can also be used for welding parts of complex shape. In fact, it is a robotic complex that solves industrial problems in the laboratory.
The laboratory also has a three-finger gripping device equipped with pressure sensors located on the inner surface of the fingers.
Such a device allows the manipulation of fragile objects, when it is important to precisely control the gripping force in order to avoid damage.
The laboratory has a robotized model of a surface vessel , which is intended for testing dynamic positioning systems.
The model is equipped with several actuators as well as radio communication hardware for transmitting control signals.
Inside the laboratory there is a pool where the operability of control algorithms to hold the position of a small model of a surface vessel with compensation for longitudinal and transverse displacements is checked.
Currently, it is planned to organize a large basin for large-scale tests with complicated scenarios.
Work with partners and plans
One of our partners is the British company TRA Robotics. Together we are working to improve the control algorithms for industrial robots for the enterprise of digital production. At such an enterprise, the entire production cycle: from development to the manufacture of industrial products, will be performed by robots and AI systems.
Other partners include the Elektropribor concern, with which we develop mechatronic and robotic systems. Our students help employees of the concern in the field of instrument making, software development and production tasks.
We also cooperate with General Motors, develop robotics together with InfoWatch. Also, the laboratory staff closely interact with the company JSC "Navis" , which implements projects for the development of dynamic positioning systems for surface vessels.
On the basis of ITMO University there is a Youth Robotics Laboratory , where students prepare for world-class competitions. For example, in 2017, our team won the World Robot Olympiad in Costa Rica, and in the summer of 2018 our students won two prizes at the All-Russian School Olympiad.
We plan to attract more industry partners and educate the younger generation of Russian scientists. Perhaps it is they who will develop such robots that will organically complement the world of people and will perform more routine and dangerous tasks in enterprises.
Photo excursions to other laboratories at ITMO University:
Source: https://habr.com/ru/post/441458/
All Articles