DIY thermal imager on Raspberry PI or “It seems now I know what I will do this summer”
Hello!
Winter has come, and with it the task of checking the heat-insulating properties of the
MLX90640. What is it?
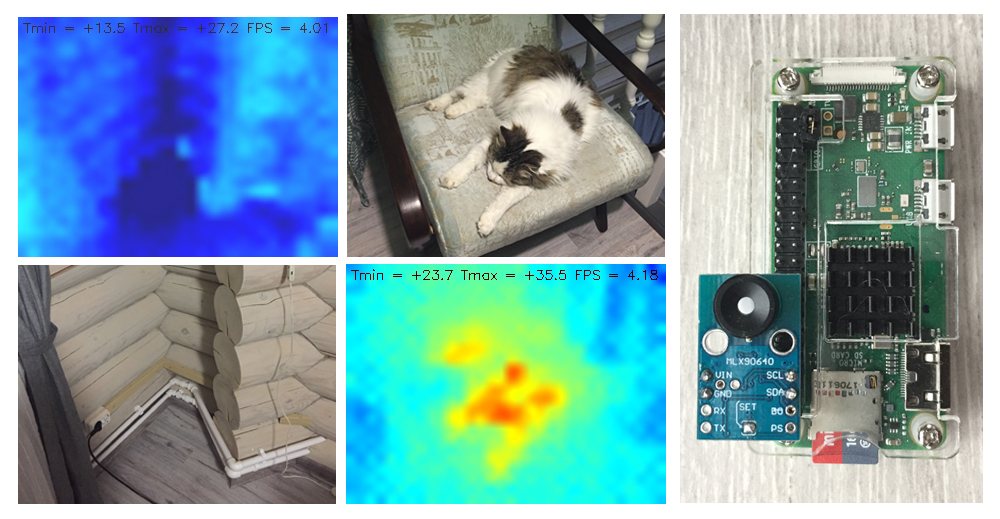
And this is, in fact, a thermal imaging matrix with a microcontroller on board. Production of a previously unknown company Melexis. Thermal imaging matrix has a dimension of 32 by 24 pixels. This is a bit, but when interpolating an image, it seems like enough to see at least something.
')
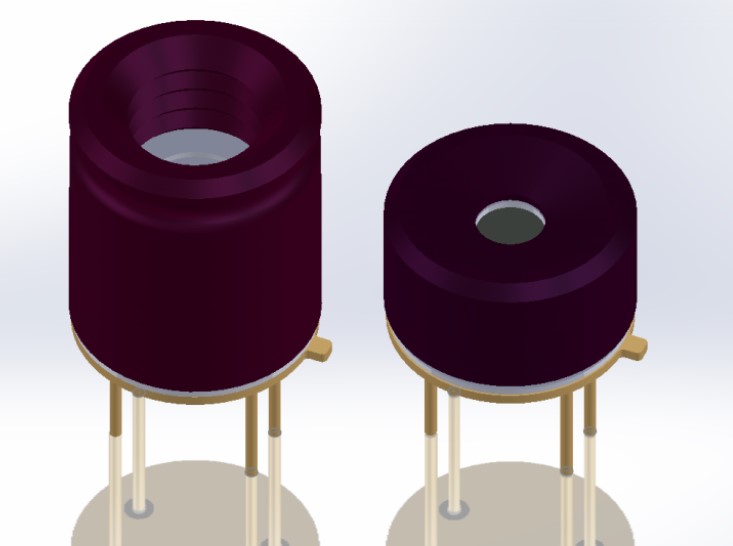
The sensor is available in two versions, the body of which differ in the viewing angle of the matrix. A more low-profile design A surveys the world at an angle of 110 (horizontal) by 75 (vertical) degrees. B - under 55 to 37.5 degrees, respectively. The device case has only four outputs - two for power, two for communication with the control device via the I2C interface. Datasheet for those interested can be downloaded here .
What then is the GY-MCU90640?
The Chinese comrades put the MLX90640 on the board with another microcontroller on board (STM32F103). Apparently, for easier management of the matrix. All this farm is called GY-MCU90640. And it is worth at the time of purchase (end of December 2018) in the region of 5 thousand rubles. As follows:

As you can see, there are two types of boards, with a narrow or wide-angle version of the sensor on board.
Which version is best for you? A good question, unfortunately, it came to me only after the module was already ordered and received. For some reason, at the time of the order, I did not pay attention to these nuances. And in vain.
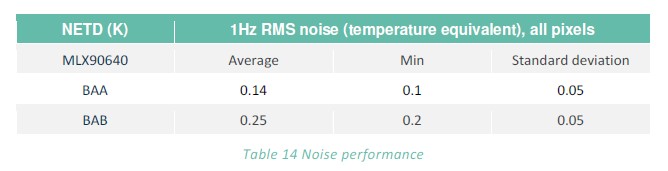
A wider version will be good on self-propelled robots or in security systems (the field of view will be larger). According to the datasheet, it also has less noise and greater measurement accuracy.
But for visualization tasks, I would recommend a more “long-range” version B. For one very significant reason. In the future, when shooting, you can expand it (manually or on a platform with a drive) and make composite “photos”, thereby increasing the more than modest resolution of 32 by 24 pixels. To collect thermal images 64 by 96 pixels, for example ... Well, okay, in the future, the text will be photos from my wide-angle version A.
Connect to Raspberry PI
You can control the thermal imaging module in two ways:
- Short-circuit the “SET” jumper on the board and, using I2C, contact the internal microcontroller MLX90640 directly.
- Leave the jumper alone and communicate with the module through a similar interface installed on the STM32F103 board via RS-232.
If you are writing in C ++, it will probably be more convenient to ignore the extra microcontroller, short the jumper and use the API from the manufacturer, which lies here .
Modest pytonists, too, can go the first way. It seems like there are a couple of libraries in Python ( here and here ). But unfortunately, none of them earned me one go.
Advanced pythonists can, in principle, write a module control driver on Python. The procedure for obtaining the frame is described in detail in the datasheet. But then you have to prescribe all calibration procedures, which seems a bit cumbersome. So I had to go the second way. He was moderately thorny, but quite passable.
Thanks to the foresight of Chinese engineers or just a happy coincidence, the handkerchief turned out to be a very good arrangement of conclusions:
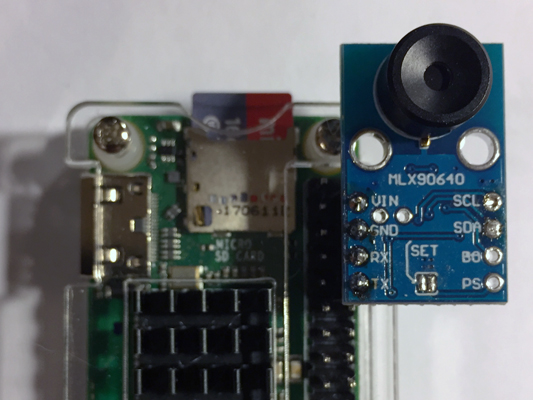
It remains only to put the block and insert the scarf into the raspberry plug. The board uses a 5 to 3 Volt converter, so the delicate Rx and Tx outputs of the Raspberry don't seem to threaten anything.
It should be added that the connection according to the first variant is also possible, but it requires more labor and soldering skills. The board must be placed on the other side of the Raspberry connector (shown in the title photo of this post).
Soft
On the well-known Chinese website, this miracle is offered to access the GY-MCU90640:
Apparently, there should be some description of the interaction protocol with the on-board microcontroller, according to which this software product works! After a brief conversation with the vendor’s handkerchief (respect to these distinguished gentlemen), this protocol was sent to me. He was in pdf and in pure Chinese.
Thanks to Google’s translator and active copy-pasting in about an hour and a half, the protocol was decrypted, anyone can get acquainted with it on Github . It turned out that the shawl understands six basic commands, among which there is a frame request on the COM port.
Each pixel of the matrix is, in fact, the temperature value of the object on which this pixel is looking. Temperature value in degrees Celsius multiplied by 100 (two-byte number). Actually, there is even a special mode in which the shawl will send frames from the matrix to Raspberry 4 times per second.
The script for thermal imaging is here:
"""MIT License
Copyright (c) 2019
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
SOFTWARE."""
import serial, time
import datetime as dt
import numpy as np
import cv2
# function to get Emissivity from MCU
def get_emissivity():
ser.write(serial.to_bytes([0xA5,0x55,0x01,0xFB]))
read = ser.read(4)
return read[2]/100
# function to get temperatures from MCU (Celsius degrees x 100)
def get_temp_array(d):
# getting ambient temperature
T_a = (int(d[1540]) + int(d[1541])*256)/100
# getting raw array of pixels temperature
raw_data = d[4:1540]
T_array = np.frombuffer(raw_data, dtype=np.int16)
return T_a, T_array
# function to convert temperatures to pixels on image
def td_to_image(f):
norm = np.uint8((f/100 - Tmin)*255/(Tmax-Tmin))
norm.shape = (24,32)
return norm
########################### Main cycle #################################
# Color map range
Tmax = 40
Tmin = 20
print ('Configuring Serial port')
ser = serial.Serial ('/dev/serial0')
ser.baudrate = 115200
# set frequency of module to 4 Hz
ser.write(serial.to_bytes([0xA5,0x25,0x01,0xCB]))
time.sleep(0.1)
# Starting automatic data colection
ser.write(serial.to_bytes([0xA5,0x35,0x02,0xDC]))
t0 = time.time()
try:
while True:
# waiting for data frame
data = ser.read(1544)
# The data is ready, let's handle it!
Ta, temp_array = get_temp_array(data)
ta_img = td_to_image(temp_array)
# Image processing
img = cv2.applyColorMap(ta_img, cv2.COLORMAP_JET)
img = cv2.resize(img, (320,240), interpolation = cv2.INTER_CUBIC)
img = cv2.flip(img, 1)
text = 'Tmin = {:+.1f} Tmax = {:+.1f} FPS = {:.2f}'.format(temp_array.min()/100, temp_array.max()/100, 1/(time.time() - t0))
cv2.putText(img, text, (5, 15), cv2.FONT_HERSHEY_SIMPLEX, 0.45, (0, 0, 0), 1)
cv2.imshow('Output', img)
# if 's' is pressed - saving of picture
key = cv2.waitKey(1) & 0xFF
if key == ord("s"):
fname = 'pic_' + dt.datetime.now().strftime('%Y-%m-%d_%H-%M-%S') + '.jpg'
cv2.imwrite(fname, img)
print('Saving image ', fname)
t0 = time.time()
except KeyboardInterrupt:
# to terminate the cycle
ser.write(serial.to_bytes([0xA5,0x35,0x01,0xDB]))
ser.close()
cv2.destroyAllWindows()
print(' Stopped')
# just in case
ser.close()
cv2.destroyAllWindows(), Raspberry PI, 4 . , . OpenCV. «s» « » jpg.
. , . — . 20 40 . Ctrl + C.
Raspberry Pi Zero W Pi 3 B+. VNC . , , powerbank' VNC . , , .
. .
, , . . , . - , .
!
UPD: . . - , , . . — .
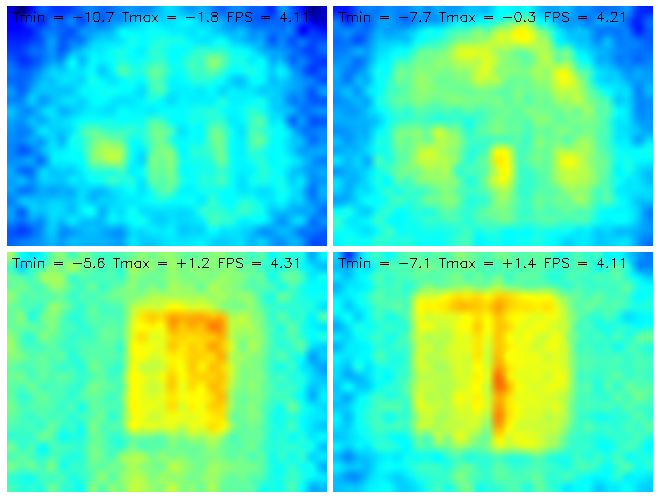
. +20...+40 -10...+5.
Source: https://habr.com/ru/post/435946/
All Articles