Scientists allowed robots to evolve, and got something weird
Evolution is a journey. On the one hand, this seems to be a simple mechanism - individuals better adapted to the environment give birth to more children, and less adapted ones do not reproduce so much, and their genes are filtered out. On the other hand, she was able to produce a stunning set of organisms. Some animals fly with feathered wings, others with membranes stretched between their fingers. Some run on two legs, others on four. And all in their own way adapted to their surroundings.
Evolution is a powerful thing, and specialists in robotics are now turning to this power for inspiration. A new conceptual study of Australian scientists is exploring how evolutionary algorithms can generate legs for robots that are suitable for walking on certain surfaces. The results were both logical, counterintuitive and strange - and also hinted at a new method of making walking machines.
Researchers started with 20 random shapes of digital legs, limited to a certain size (we don’t need three-meter feet from nightmares). Each scheme is based on elements known as Bezier curves . “The Bezier curve can be seen in Microsoft Paint, where you define a curve from several control points, only we use them in three dimensions,” says researcher David Howard from the Australian Public Organization for Scientific and Industrial Research. The system projects these curves onto a grid of three-dimensional pixels — voxels . “In the place where the curve intersects with the voxel, we place our material,” Howard adds. “Everything else remains empty.” As a result, each scheme becomes unique.
The simulation studies the fitness of the resulting foot for walking on three different surfaces: hard soil, gravel, and water. Simply, instead of choosing properties such as good vision or camouflage, as happens with natural selection, the system selects torque schemes that the motor would have to develop in order to rotate a leg of a certain length when walking on a given surface. In other words, a good foot is an energy efficient foot. Also, bonuses were given for legs that required less material.
')
“For the gravel surface on which the foot goes, we calculate the forces acting on each pebble,” says Howard. “It gives us a very accurate idea of what the foot is doing in the environment.” The same happens with water and solid soil.
Then the researchers took 20 of the original legs and combined them with those that showed themselves best. We chose the best-fit legs to create child legs, a bit similar to the parent. “We just do it again and again,” says Howard. For a thousand generations. As a result, the half of the population that showed the worst results disappeared, as animals disappear in nature under the influence of environmental factors. "And then we apply automatic adaptation to the environment."

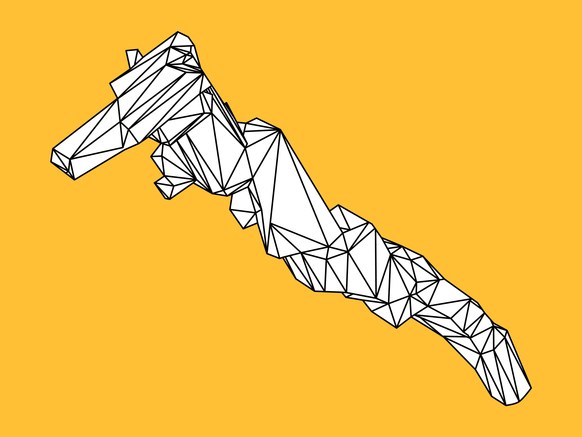
In the image above, in the first row, the legs are located, which the algorithm considered most effective for walking on a hard surface. The middle row is preferred for gravel, the bottom row is for water.
Blade-like legs are a logical choice for walking on hard ground. Because she is hard, her narrow legs won't fall through. "Therefore, the legs for the gravel turned out to be thicker, they need wider traces," said Howard. They help the legs to walk on the gravel, not falling down, like snowshoes.
Thick legs adapted for water? This is still a mystery. “Something strange happened with water, we were expecting something like blades, like walking on a hard surface,” said Howard. This would allow them to cut the water. One would also expect more slender limbs from the system, considering all the initial tasks. “But narrow legs did not work. We are not quite sure why yet. ”
Some of the protrusions also turned out to be rather strange, especially on the legs intended for the soil. “We like the theory by which they have their own purpose,” says Howard. But in fact, when marking the Bezier curve onto a voxel grid, its part that seems useless is actually part of a much larger curve providing the structure inside the leg. ” The tabs look brutal, but in reality, they are just artifacts that do not help, but they do not interfere with the legs. Howard and his colleagues set up the system so that it recognizes and deletes them automatically.
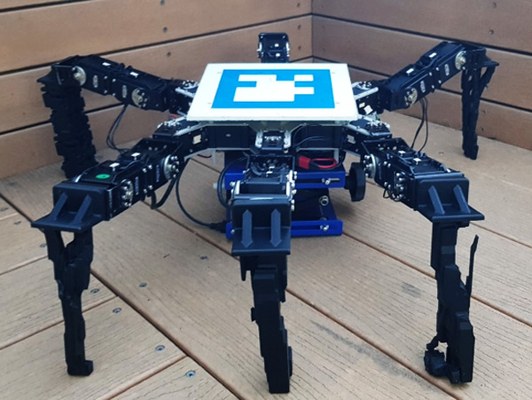
The researchers unpacked such legs on a 3D printer, and connected them to a six-legged robot. Now they plan to test their effectiveness on the real surface compared to the legs developed by people. The team has already loaded into the simulator examples of such legs, and it turned out that the legs resulting from the "evolution" are no worse than, and sometimes better than, artificial ones.
Why do we need to spend efforts on simulating the evolution of robots? For example, you can give the robot a narrow specialization to move on a certain surface, and not be based on the legs of wide application. Theoretically, this will allow the robot to cope better in certain situations, for example, while overcoming sand dunes.
“If you want to use the robot in another environment, you can simply re-launch the algorithm,” says Tonnes Nygaard, who studies shape-changing under the influence of the evolution of robots at the University of Oslo, and who did not participate in this work. “If you have developed a system specifically designed for a specific purpose, then it may not be possible in the later design stages.”
The Nigaard system, a four-legged robot with telescopic legs, evolves on the move. Through trial and error — that is, often falling — he learns to walk on, for example, an icy surface, shortening his legs to lower the center of gravity. Indoors, he can lengthen them to increase the stride length and increase the efficiency of movement. It may be possible to combine these two technologies: use the simulation to design a suitable design for the legs, and then embed it in a real machine that can change.
And if evolution turns out to do well, it is surprising. “Evolution is looking for answers in a much wider range of options,” says Howard. “She doesn't care what the resulting thing looks like.” It may look completely counterintuitive, not the way a human engineer would invent. But if it works, nothing else matters. ”
Source: https://habr.com/ru/post/428936/
All Articles