How I built hexapods in Space Engineers. Part 1
Hello I want to tell about the design and programming of limb control system in a hexapod built in Space Engineers.
Looking ahead, I’ll say that everything related to programming in Space Engineer will be in the next article. In this article, I’ll tell you about inverse kinematics and show a prototype on HTML Canvas in which I debugged algorithms.
The articulated chassis was originally built, and then a digging unit was built on it. This configuration ensured contact of all the wheels with the surface on large irregularities, including when twisting.
')

Like this
But I was faced with the impossibility of placing it precisely on the field, since the wheels often slid down (the problem of physics — most blocks (including the wheels) have a too small friction coefficient). The wheeled platform with full turning wheel modules was too cumbersome and suffered from periodic physics explosion. As a result, it was decided to build a walking robot - namely, the hexapod, as the most stable walking platform.
Where does a normal person begin to build a hexapod? Probably go into the game and begin to build the body of a robot with limbs, and then think about how to revive it all. But this is not our method.
For the construction of the foot the following scheme was chosen:
Inner joint - internal joint swinging along the yaw axis (yaw)
Mid joint and outer joint - outer joints that swing along the pitch axis (pitch). The direction of reference is from the base of the foot to the end of the foot.

Angle 0 for all joints means that the leg is fully extended (it will be easier to build a straight leg in the game).
The task is to find such angles of rotation of the joints at a given target point, so that the end of the foot is at the given point. So time to remember trigonometry.
The angle of the inner joint can be found through the arctangent of the horizontal coordinates of the target.
With two other joints more difficult. We have the length of all joints. You can find the angle to the horizon and the distance between the middle joint and the ground, as well as the distance to the target point.
Next, through the cosine theorem, you need to find the angles of the triangle on known sides.
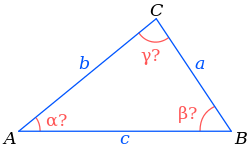

→ Solving triangles
So it looks like in the code:
Further. The robot must walk, right? That is, we must transmit the coordinates of a given position N times per second to each leg. Taking into account the fact that legs 6 and 3 of them move in antiphase it turns out to be somehow difficult. You need to enter a new level of abstraction.
But what if we imagine that the foot is moving in a circle and it needs to pass an angle denoting a position on this circle? Removal to the side becomes permanent and only one parameter needs to be passed, changing cyclically. Then the target coordinates are through the sine and cosine.
For now enough
Thinking about how everything will work, I realized that the task is too complicated for everything to work from the first time (everything is bad with Space Engineers debag, but more on that in the next part).
So I decided to write a visualizer. I wanted to do it without additional libraries and be able to run it in one click and without being tied to the environment.
Therefore, JS + HTML Canvas was selected.
And now draw an owl.
Code:
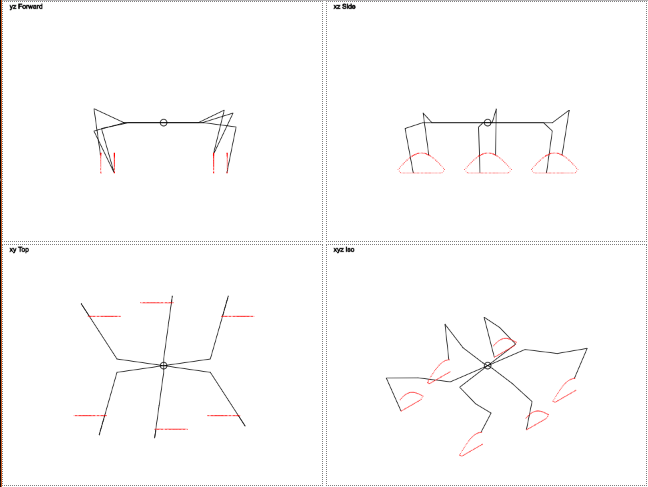
Result:
Is it really pretty?
Here you can see that the trajectory of the movement of the legs is different from the circumference. Vertical movement resembles a stripped-down sinusoid, and horizontal movement is linear. This should reduce the load on the legs.
Now a few explanations of what happens in the code.
For turning I considered 2 situations:
If the robot is standing - legs move in a circle.
The only thing is that the movement along the circumference would greatly complicate the code with the current implementation. Therefore, the legs move tangentially to the circumference.
When the robot moves, you need to implement something like the Ackermann steering geometry with a differential.
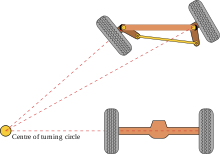
That is, the step length of the legs moving along a smaller radius is less. And the angle of rotation is greater.
To implement a change in the angle of rotation for each leg, I came up with the following algorithm:
1. We consider the angle from the initial position of the legs to the center of the robot:
2. We consider the angle from the initial position of the leg to (the center of the robot + the offset that is responsible for the rotation is a variable parameter):
3. Turn the step on the difference of these angles:
But that's not all. Still need to change the length of the step. Realization in the forehead — multiplying the step length by changing the distance to the center — had a fatal flaw — the external legs walked too wide and began to touch each other.
Therefore it was necessary to complicate the implementation:
1. We consider the change in the distance to the center for each leg:
0.3 - magic number
2. Find the relationship between the minimum and maximum change.
This multiplier reflects the difference between the minimum and maximum distance to the center. It is always less than 1 and if you multiply the length of the step on it, it will not increase when turning, even for legs external to the direction of rotation.
Here's how it works (gif 2 megabytes):
→ Play with the result here
For a closer look, I recommend saving the content in an html file and continue with your favorite text editor.
In the next post I will tell you how I made it all work in Space Engineers.
Spoiler: in Programmable Block you can write on C # almost the latest version.
Looking ahead, I’ll say that everything related to programming in Space Engineer will be in the next article. In this article, I’ll tell you about inverse kinematics and show a prototype on HTML Canvas in which I debugged algorithms.
Background and problem statement.
The articulated chassis was originally built, and then a digging unit was built on it. This configuration ensured contact of all the wheels with the surface on large irregularities, including when twisting.
')
Like this
But I was faced with the impossibility of placing it precisely on the field, since the wheels often slid down (the problem of physics — most blocks (including the wheels) have a too small friction coefficient). The wheeled platform with full turning wheel modules was too cumbersome and suffered from periodic physics explosion. As a result, it was decided to build a walking robot - namely, the hexapod, as the most stable walking platform.
Where does a normal person begin to build a hexapod? Probably go into the game and begin to build the body of a robot with limbs, and then think about how to revive it all. But this is not our method.
I started with the theory
For the construction of the foot the following scheme was chosen:
Inner joint - internal joint swinging along the yaw axis (yaw)
Mid joint and outer joint - outer joints that swing along the pitch axis (pitch). The direction of reference is from the base of the foot to the end of the foot.
Angle 0 for all joints means that the leg is fully extended (it will be easier to build a straight leg in the game).
The task is to find such angles of rotation of the joints at a given target point, so that the end of the foot is at the given point. So time to remember trigonometry.
The angle of the inner joint can be found through the arctangent of the horizontal coordinates of the target.
const yawRad = Math.atan2(esimatedLegPosition.x, esimatedLegPosition.y); With two other joints more difficult. We have the length of all joints. You can find the angle to the horizon and the distance between the middle joint and the ground, as well as the distance to the target point.
Next, through the cosine theorem, you need to find the angles of the triangle on known sides.
→ Solving triangles
So it looks like in the code:
getLegAngles(esimatedLegPosition) { const yawRad = Math.atan2(esimatedLegPosition.x, esimatedLegPosition.y); const dx = Math.hypot(esimatedLegPosition.x, esimatedLegPosition.y) - this.innerJoint.length; const dz = this.step.idlePosition.z + esimatedLegPosition.z; const hyp = Math.hypot(dx, dz); if (hyp > this.midJoint.length + this.outerJoint.length) {//out of reach hyp = this.midJoint.length + this.outerJoint.length; } const innerAngleRad = Math.acos((this.outerJoint.length * this.outerJoint.length - this.midJoint.length * this.midJoint.length - hyp * hyp) / (-2 * this.midJoint.length * hyp)) + Math.atan2(dz, dx); const outerAngleRad = Math.acos((hyp * hyp - this.midJoint.length * this.midJoint.length - this.outerJoint.length * this.outerJoint.length) / (-2 * this.midJoint.length * this.outerJoint.length)) - Math.PI; return { yaw: yawRad, midPitch: innerAngleRad, outerPitch: outerAngleRad }; } Motion
Further. The robot must walk, right? That is, we must transmit the coordinates of a given position N times per second to each leg. Taking into account the fact that legs 6 and 3 of them move in antiphase it turns out to be somehow difficult. You need to enter a new level of abstraction.
But what if we imagine that the foot is moving in a circle and it needs to pass an angle denoting a position on this circle? Removal to the side becomes permanent and only one parameter needs to be passed, changing cyclically. Then the target coordinates are through the sine and cosine.
For now enough
Thinking about how everything will work, I realized that the task is too complicated for everything to work from the first time (everything is bad with Space Engineers debag, but more on that in the next part).
So I decided to write a visualizer. I wanted to do it without additional libraries and be able to run it in one click and without being tied to the environment.
Therefore, JS + HTML Canvas was selected.
And now draw an owl.
Code:
Spoiler header
Vector:
Joint:
Step - data structure for foot control:
Leg:
Robot:
But for drawing will need some more classes:
Canvas wrapper:
In the Leg class there is a method for getting the current coordinates of the joints. These are the coordinates we will draw.
So I added a drawing of the points where the leg was in N last ticks.
And finally, the Worker, who will run the simulation:
class Vector { constructor(x, y, z) { this.x = x; this.y = y; this.z = z; }; distanceTo(vector) { return Math.sqrt(Math.pow(this.x - vector.x, 2) + Math.pow(this.y - vector.y, 2) + Math.pow(this.z - vector.z, 2)); } diff(vector) { return new Vector( this.x - vector.x, this.y - vector.y, this.z - vector.z ); } add(vector) { return new Vector( this.x + vector.x, this.y + vector.y, this.z + vector.z ); } } Joint:
class Joint { constructor(angle, position, length) { this.angle = angle; this.position = position; this.length = length; this.targetAngle = angle; this.previousAngle = angle; this.velocity = 0; }; setTargetAngle(targetAngle) { this.targetAngle = targetAngle; this.velocity = this.targetAngle - this.normalizeAngle(this.angle); } normalizeAngle(angle) { while (angle <= -Math.PI) angle += Math.PI * 2; while (angle > Math.PI) angle -= Math.PI * 2; return angle; } getCurrentVelocity() {//per tick return this.normalizeAngle(this.angle - this.previousAngle); } tick() { this.previousAngle = this.angle; this.angle = this.angle + this.velocity; } } Step - data structure for foot control:
class Step { constructor( idlePosition,//vector relative to inner joint angle,//step direction length,//step length height,//step height phaseShift// ) { this.idlePosition = idlePosition; this.angle = angle;//radians this.length = length; this.height = height; this.phaseShift = phaseShift; } } Leg:
class Leg { constructor( vehicleCenter, innerJoint, midJoint, outerJoint, step, phaseStep ) { this.vehicleCenter = vehicleCenter; this.innerJoint = innerJoint; this.midJoint = midJoint; this.outerJoint = outerJoint; this.step = step; this.phaseStep = phaseStep; this.innerJoint.length = innerJoint.position.distanceTo(midJoint.position);//calculate this.midJoint.length = midJoint.position.distanceTo(outerJoint.position);//calculate //this.outerJoint.length = 100; this.joints = [innerJoint, midJoint, outerJoint]; this.preCalculateAngles(); } preCalculateAngles() { this.angles = {}; for (let phase = 0; phase < 360; phase += this.phaseStep) { this.angles[phase] = this.getLegAngles(this.getEsimatedLegPosition(phase, this.step.phaseShift)) } } applyStepHeight(z) { const idleYawRad = Math.atan2(this.step.idlePosition.x, this.step.idlePosition.y); const diffHypot = Math.hypot(this.step.idlePosition.x, this.step.idlePosition.y); const minZ = Math.abs(this.midJoint.length - this.outerJoint.length); const maxZ = (this.midJoint.length + this.outerJoint.length) * 0.6; if (Math.hypot(z, 0) > maxZ) { z = z > 0 ? maxZ : -maxZ; } const safeY = (this.innerJoint.length + this.midJoint.length * 0.5 + this.outerJoint.length * 0.5) * Math.cos(idleYawRad); const vAngle = Math.asin(z / safeY); const y = safeY * Math.cos(vAngle) * Math.cos(idleYawRad); this.step.idlePosition.z = z; this.step.idlePosition.y = this.step.idlePosition.y > 0 ? y : -y; this.preCalculateAngles(); } applyStepAngle(angle) { this.step.angle = angle; this.preCalculateAngles(); } applyPhase(phase/*0-360*/) { const legAngles = this.angles[phase]; this.innerJoint.setTargetAngle(legAngles.yaw); this.midJoint.setTargetAngle(legAngles.midPitch); this.outerJoint.setTargetAngle(legAngles.outerPitch); } getEsimatedLegPosition(phase, phaseShift) { phase = (phase + phaseShift) % 360; const stepX = ((phase < 180 ? phase : 180 - phase % 180) / 180 - 0.5) * this.step.length;//linear movement along step direction const stepZ = Math.max(Math.sin(phase * Math.PI / 180), -0.2) * this.step.height / 1.2; //const stepZ = Math.max((phase > 180 ? Math.cos(phase * Math.PI / 360) + 0.9 : Math.cos((phase - 120) * Math.PI / 360)) * .9 - .1, 0) * this.step.height; const x = this.step.idlePosition.x + stepX * Math.cos(this.step.angle); const y = this.step.idlePosition.y + stepX * Math.sin(this.step.angle); return new Vector(x, y, stepZ); } getLegAngles(esimatedLegPosition) { const yawRad = Math.atan2(esimatedLegPosition.x, esimatedLegPosition.y); const dx = Math.hypot(esimatedLegPosition.x, esimatedLegPosition.y) - this.innerJoint.length; const dz = this.step.idlePosition.z + esimatedLegPosition.z; const hyp = Math.hypot(dx, dz); if (hyp > this.midJoint.length + this.outerJoint.length) {//out of reach hyp = this.midJoint.length + this.outerJoint.length; } const innerAngleRad = Math.acos((this.outerJoint.length * this.outerJoint.length - this.midJoint.length * this.midJoint.length - hyp * hyp) / (-2 * this.midJoint.length * hyp)) + Math.atan2(dz, dx); const outerAngleRad = Math.acos((hyp * hyp - this.midJoint.length * this.midJoint.length - this.outerJoint.length * this.outerJoint.length) / (-2 * this.midJoint.length * this.outerJoint.length)) - Math.PI; if (isNaN(yawRad) || isNaN(innerAngleRad) || isNaN(outerAngleRad)) { console.log(yawRad, innerAngleRad, outerAngleRad); console.log(dx, dz); return; } return { yaw: yawRad, midPitch: innerAngleRad, outerPitch: outerAngleRad }; } getMaxMinAngles() { const angles = [0, 90, 180, 270].map((phase) => { return this.getLegAngles(getEsimatedLegPosition(phase, 0)); }); return { yawMin: Math.min(angles.map((x) => { return x.yaw })), yawMax: Math.max(angles.map((x) => { return x.yaw })), midPitchMin: Math.min(angles.map((x) => { return x.midPitch })), midPitchMax: Math.max(angles.map((x) => { return x.midPitch })), outerPitchMin: Math.min(angles.map((x) => { return x.outerPitch })), outerPitchMax: Math.max(angles.map((x) => { return x.outerPitch })), } } tick() { this.joints.forEach(function (joint) { joint.tick(); }); } getVectors() { const res = []; const sinYaw = Math.sin(this.innerJoint.angle); const cosYaw = Math.cos(this.innerJoint.angle); let currentVector = this.vehicleCenter; res.push(currentVector); currentVector = currentVector.add(this.innerJoint.position); res.push(currentVector); currentVector = currentVector.add(new Vector( this.innerJoint.length * sinYaw, this.innerJoint.length * cosYaw, 0 )); res.push(currentVector); const dxMid = Math.cos(this.midJoint.angle) * this.midJoint.length; const dzMid = Math.sin(this.midJoint.angle) * this.midJoint.length; currentVector = currentVector.add(new Vector( dxMid * sinYaw, dxMid * cosYaw, dzMid )); res.push(currentVector); const c = this.midJoint.angle + this.outerJoint.angle; const dxOuter = Math.cos(c) * this.outerJoint.length; const dzOuter = Math.sin(c) * this.outerJoint.length; currentVector = currentVector.add(new Vector( dxOuter * sinYaw, dxOuter * cosYaw, dzOuter )); res.push(currentVector); return res; } } Robot:
class Hexapod { constructor(phaseStep) { this.idleHeight = -70; this.stepAngle = 0; this.turnAngle = 0; this.stepLength = 70; this.stepHeight = 30; this.debugPoints = []; const vehicleCenter = new Vector(0, 0, 0); this.legs = [ new Leg( vehicleCenter, new Joint(0, new Vector(-70, 10, 0), 50), new Joint(0, new Vector(-70, 60, 0), 50), new Joint(0, new Vector(-70, 110, 0), 70), new Step(new Vector(-30, 90, this.idleHeight), this.stepAngle, this.stepLength, this.stepHeight, 0), phaseStep ), new Leg( vehicleCenter, new Joint(0, new Vector(-70, -10, 0), 50), new Joint(0, new Vector(-70, -60, 0), 50), new Joint(0, new Vector(-70, -110, 0), 70), new Step(new Vector(-30, -90, this.idleHeight), this.stepAngle, this.stepLength, this.stepHeight, 180), phaseStep ), new Leg( vehicleCenter, new Joint(0, new Vector(0, 10, 0), 50), new Joint(0, new Vector(0, 60, 0), 50), new Joint(0, new Vector(0, 110, 0), 70), new Step(new Vector(0, 100, this.idleHeight), this.stepAngle, this.stepLength, this.stepHeight, 180), phaseStep ), new Leg( vehicleCenter, new Joint(0, new Vector(0, -10, 0), 50), new Joint(0, new Vector(0, -60, 0), 50), new Joint(0, new Vector(0, -110, 0), 70), new Step(new Vector(0, -100, this.idleHeight), this.stepAngle, this.stepLength, this.stepHeight, 0), phaseStep ), new Leg( vehicleCenter, new Joint(0, new Vector(70, 10, 0), 50), new Joint(0, new Vector(70, 60, 0), 50), new Joint(0, new Vector(70, 110, 0), 70), new Step(new Vector(30, 90, this.idleHeight), this.stepAngle, this.stepLength, this.stepHeight, 0), phaseStep ), new Leg( vehicleCenter, new Joint(0, new Vector(70, -10, 0), 50), new Joint(0, new Vector(70, -60, 0), 50), new Joint(0, new Vector(70, -110, 0), 70), new Step(new Vector(30, -90, this.idleHeight), this.stepAngle, this.stepLength, this.stepHeight, 180), phaseStep ), ]; } applyPhase(phase/*0-360*/) { this.legs.forEach(function (leg) { leg.applyPhase(phase); }); } changeHeight(value) { this.legs.forEach(function (leg) { leg.applyStepHeight(this.idleHeight + value); }, this); } changeStepLength(value) { this.stepLength += value; this.legs.forEach(function (leg) { leg.step.length = this.stepLength; leg.preCalculateAngles(); }, this); } applyTurn1(centerX, centerY) { const angleToAxis = Math.atan2(centerX, centerY); const distanceToAxis = Math.hypot(centerX, centerY); distanceToAxis = 1000/distanceToAxis; this.legs.forEach(leg => { const dx = leg.step.idlePosition.x + leg.innerJoint.position.x + Math.sin(angleToAxis)*distanceToAxis || 0; const dy = leg.step.idlePosition.y + leg.innerJoint.position.y + Math.cos(angleToAxis)*distanceToAxis || 0; const angle = Math.atan2(dy,dx); const hypIdle = Math.hypot(dx, dy); leg.applyStepAngle(angle+Math.PI/2); leg.step.length = this.stepLength *hypIdle/ ((distanceToAxis || 0) + 1000); }); } applyTurn(centerX, centerY) { this.stepAngle = Math.atan2(centerX, centerY); if (this.stepAngle > Math.PI / 2) this.stepAngle -= Math.PI; if (this.stepAngle < -Math.PI / 2) this.stepAngle += Math.PI; const mults = this.legs.map(leg => Math.hypot(leg.step.idlePosition.y + leg.innerJoint.position.y, leg.step.idlePosition.x + leg.innerJoint.position.x) / Math.hypot(leg.step.idlePosition.y + leg.innerJoint.position.y + centerY*.3, leg.step.idlePosition.x + leg.innerJoint.position.x + centerX*.3)); const minMult = Math.min(...mults); const maxMult = Math.max(...mults); const mult = minMult / maxMult; const d = Math.pow(Math.max(...this.legs.map(leg =>Math.hypot(leg.step.idlePosition.y + leg.innerJoint.position.y, leg.step.idlePosition.x + leg.innerJoint.position.x))),2)/Math.hypot(centerX,centerY); const a = Math.atan2(centerX,centerY); this.legs.forEach(leg => { const dx = leg.step.idlePosition.x + leg.innerJoint.position.x; const dy = leg.step.idlePosition.y + leg.innerJoint.position.y; const idleAngle = Math.atan2(dx, dy) + this.stepAngle; const turnAngle = Math.atan2(dx + centerX, dy + centerY); const hypIdle = Math.hypot(dx, dy); const hyp = Math.hypot(dx + centerX, dy + centerY); leg.applyStepAngle(turnAngle - idleAngle); leg.step.length = this.stepLength * hyp / hypIdle * mult; }); this.debugPoints = [new Vector(Math.sin(a)*-d,Math.cos(a)*-d,0)]; } tick() { this.legs.forEach(function (leg) { leg.tick(); }); } getVectors() { return this.legs.map(function (leg) { return leg.getVectors() }); } } But for drawing will need some more classes:
Canvas wrapper:
class Canvas { constructor(id, label, axisSelectorX, axisSelectorY) { const self = this; this.id = id; this.label = label; this.canvas = document.getElementById(id); this.ctx = this.canvas.getContext('2d'); this.axisSelectorX = axisSelectorX; this.axisSelectorY = axisSelectorY; this.canvasHeight = this.canvas.offsetHeight; this.canvasWidth = this.canvas.offsetWidth; this.initialY = this.canvasHeight / 2; this.initialX = this.canvasWidth / 2; this.traceCounter = 0; this.maxTraces = 50; this.traces = {}; const axisSize = 150; this.axisVectors = [ [ new Vector(-axisSize, -axisSize, -axisSize), new Vector(-axisSize, -axisSize, axisSize) ], [ new Vector(-axisSize, -axisSize, -axisSize), new Vector(-axisSize, axisSize, -axisSize) ], [ new Vector(-axisSize, -axisSize, -axisSize), new Vector(axisSize, -axisSize, -axisSize) ], ] this.mouseOver = false; this.mousePos = { x: 0, y: 0 };//relative to center this.clickPos = { x: 0, y: 0 };//relative to center this.canvas.addEventListener("mouseenter", function (event) { self.mouseOver = true; }, false); this.canvas.addEventListener("mouseleave", function (event) { self.mouseOver = false; }, false); this.canvas.addEventListener("mousemove", function (event) { if (self.mouseOver) { self.mousePos = { x: event.offsetX - self.initialX, y: event.offsetY - self.initialY }; } }, false); this.canvas.addEventListener("mouseup", function (event) { if (self.mouseOver) { self.clickPos = { x: event.offsetX - self.initialX, y: event.offsetY - self.initialY }; } }, false); }; clear(drawAxis) { this.ctx.clearRect(0, 0, this.canvasWidth, this.canvasHeight); this.ctx.strokeStyle = "#000000"; this.ctx.strokeText(this.label, 10, 10); if (drawAxis) { this.axisVectors.forEach(function (vectors, i) { this.ctx.moveTo(this.initialX, this.initialY); this.ctx.beginPath(); vectors.forEach(function (vector) { this.ctx.lineTo(this.initialX + this.axisSelectorX(vector), this.initialY - this.axisSelectorY(vector)); }, this); this.ctx.stroke(); const lastVector = vectors[vectors.length - 1]; this.traces[[this.traceCounter, i]] = lastVector }, this); } } drawVectors(vectors) {/*2d array*/ vectors.forEach(function (vectors, i) { this.ctx.moveTo(this.initialX, this.initialY); this.ctx.beginPath(); vectors.forEach(function (vector) { this.ctx.lineTo(this.initialX + this.axisSelectorX(vector), this.initialY - this.axisSelectorY(vector)); }, this); this.ctx.stroke(); const lastVector = vectors[vectors.length - 1]; this.traces[[this.traceCounter, i]] = lastVector }, this); for (const key in this.traces) { const vector = this.traces[key]; this.ctx.fillStyle = "#FF0000";//red this.ctx.fillRect(this.initialX + this.axisSelectorX(vector), this.initialY - this.axisSelectorY(vector), 1, 1); } this.ctx.strokeStyle = "#000000"; this.ctx.beginPath(); this.ctx.arc(this.clickPos.x + this.initialX, this.clickPos.y + this.initialY, 5, 0, 2 * Math.PI); this.ctx.stroke(); if (this.mouseOver) { this.ctx.strokeStyle = "#00FF00"; this.ctx.beginPath(); this.ctx.arc(this.mousePos.x + this.initialX, this.mousePos.y + this.initialY, 10, 0, 2 * Math.PI); this.ctx.stroke(); } this.traceCounter = (this.traceCounter + 1) % this.maxTraces; } drawPoints(points) { this.ctx.fillStyle = "#00ff00";//green points.forEach(function (point) { this.ctx.fillRect(this.initialX + this.axisSelectorX(point), this.initialY - this.axisSelectorY(point), 3, 3); }, this); } } In the Leg class there is a method for getting the current coordinates of the joints. These are the coordinates we will draw.
So I added a drawing of the points where the leg was in N last ticks.
And finally, the Worker, who will run the simulation:
class Worker { constructor(tickTime) { const self = this; this.phaseStep = 5; this.tickTime = tickTime; const tan30 = Math.tan(Math.PI / 6); const scale = 0.7; this.canvases = [ new Canvas('canvasForward', 'yz Forward', function (v) { return vy }, function (v) { return vz }), new Canvas('canvasSide', 'xz Side', function (v) { return vx }, function (v) { return vz }), new Canvas('canvasTop', 'xy Top', function (v) { return vx }, function (v) { return -vy }), new Canvas('canvasIso', 'xyz Iso', function (v) { return vx * scale + vy * scale }, function (v) { return vz * scale + vx * tan30 * scale - vy * tan30 * scale }), ]; this.bot = new Hexapod(this.phaseStep); this.phase = 0; this.focus = true; window.addEventListener('focus', function () { console.log('focus'); self.focus = true; }); window.addEventListener('blur', function () { console.log('blur'); self.focus = false; }); this.start(); } tick(argument) { const canvasForward = this.canvases[0]; const bot = this.bot; if (canvasForward.mouseOver) { bot.changeHeight(-canvasForward.mousePos.y); } else { bot.changeHeight(0); } const canvasTop = this.canvases[2]; if (canvasTop.mouseOver) { bot.applyTurn(-canvasTop.mousePos.x, -canvasTop.mousePos.y); } else { bot.applyTurn(0, 0); } this.phase = (this.phase + this.phaseStep) % 360; bot.applyPhase(this.phase); bot.tick(); const vectors = bot.getVectors(); this.canvases.forEach(function (c) { c.clear(false); c.drawVectors(vectors); c.drawPoints(bot.debugPoints); }); } start() { this.stop(); this.interval = setInterval((function (self) { return function () { if (self.focus) { self.tick(); } } })(this), this.tickTime); } stop() { clearInterval(this.interval); } } Result:
Is it really pretty?
Here you can see that the trajectory of the movement of the legs is different from the circumference. Vertical movement resembles a stripped-down sinusoid, and horizontal movement is linear. This should reduce the load on the legs.
Now a few explanations of what happens in the code.
How to teach a robot to turn?
For turning I considered 2 situations:
If the robot is standing - legs move in a circle.
The only thing is that the movement along the circumference would greatly complicate the code with the current implementation. Therefore, the legs move tangentially to the circumference.
When the robot moves, you need to implement something like the Ackermann steering geometry with a differential.
That is, the step length of the legs moving along a smaller radius is less. And the angle of rotation is greater.
To implement a change in the angle of rotation for each leg, I came up with the following algorithm:
1. We consider the angle from the initial position of the legs to the center of the robot:
const idleAngle = Math.atan2(dx, dy) + this.stepAngle; 2. We consider the angle from the initial position of the leg to (the center of the robot + the offset that is responsible for the rotation is a variable parameter):
const turnAngle = Math.atan2(dx + centerX, dy + centerY); 3. Turn the step on the difference of these angles:
leg.applyStepAngle(turnAngle - idleAngle); But that's not all. Still need to change the length of the step. Realization in the forehead — multiplying the step length by changing the distance to the center — had a fatal flaw — the external legs walked too wide and began to touch each other.
Therefore it was necessary to complicate the implementation:
1. We consider the change in the distance to the center for each leg:
const mults = this.legs.map(leg => Math.hypot(leg.step.idlePosition.y + leg.innerJoint.position.y, leg.step.idlePosition.x + leg.innerJoint.position.x) / Math.hypot(leg.step.idlePosition.y + leg.innerJoint.position.y + centerY*.3, leg.step.idlePosition.x + leg.innerJoint.position.x + centerX*.3)); 0.3 - magic number
2. Find the relationship between the minimum and maximum change.
const minMult = Math.min(...mults); const maxMult = Math.max(...mults); const mult = minMult / maxMult; This multiplier reflects the difference between the minimum and maximum distance to the center. It is always less than 1 and if you multiply the length of the step on it, it will not increase when turning, even for legs external to the direction of rotation.
const hypIdle = Math.hypot(dx, dy); const hyp = Math.hypot(dx + centerX, dy + centerY); leg.step.length = this.stepLength * hyp / hypIdle * mult; Here's how it works (gif 2 megabytes):
gif 2 megabytes
→ Play with the result here
For a closer look, I recommend saving the content in an html file and continue with your favorite text editor.
In the next post I will tell you how I made it all work in Space Engineers.
Spoiler: in Programmable Block you can write on C # almost the latest version.
Source: https://habr.com/ru/post/426195/
All Articles