Robots make the world clean
Historically, the use of robots began with production. First, robots were created to perform individual operations, then robotic production sites and, finally, flexible production systems. The experience of their operation allows us to conclude that in the near future, the volume of output can be increased several times without increasing the cost of human labor. But this undoubted achievement of scientific and technological progress generates not only hopes for the long-awaited abundance, the disappearance of poverty, etc., but also certain fears.

Automatic production [1]
Indeed, nothing comes out of nothing. If consumption grows several times, then resources will be needed as many times more. And the environment is already experiencing a critical load on the part of humanity. According to statistics, now one person produces about 3-5 liters of garbage per day, which is up to 120 liters per month, and 1,500 liters per year [9, the error in the source has been corrected due to the dragonnur observation]. To increase production even twice means to provoke an ecological catastrophe. It turns out that robots are somewhat similar to nuclear weapons - with enormous potential (in the case of destructive weapons, for creative robots), their full-scale use is impossible because of the universal tragic consequences.

Frame from the film “Dump”, 2014 [2]
')
Fortunately, robots are not thermonuclear bombs and there is a way out of the contradiction between possibilities and consequences. This output is the robots themselves, adapted for the disposal of production and consumption waste. According to the old principle, similar is treated by similar. If we double the production and at the same time create such robotic systems that will utilize and convert 50% of waste into secondary raw materials or energy, then the load on the environment will not change. If the level of utilization reaches 67%, then production can be increased threefold. And so on.
Naturally, this is an extremely rough scheme. In practice, it is necessary to take into account specific methods and volumes of utilization, the cost of producing additional equipment and many other factors. But it is obvious that the increase in consumption is closely related to the degree of recycling. And since a society with a high level of consumption is not too ready to engage in dirty manual labor, the robots will have to work hard. And they have already begun work.
The task of waste disposal can be divided into three subtasks:
Let's start with the first. Now you won't surprise anyone with a vacuum cleaner or a window cleaning robot. But this is the simplest robots to collect waste. But, of course, their possibilities are extremely limited, and the corresponding waste - mainly household and street dust - does not arouse interest in terms of further disposal.

IClebo Pop Robot Vacuum Cleaner [3]

Robot for washing windows Windoro WCR-I001 [4]
But the "stray" waste basket is much more efficient than usual. In the laboratory for the development of interactions and communications of the Japanese Technological University Toyohashi created a small trash container on a wheelbase. He received the name Social Trash Box (STB). The robot is equipped with a microprocessor, a video camera and a speaker, as well as infrared sensors and a distance sensor.

Social Trash Box [5]
The robot begins its vigorous activity with determining the place where people are present at the moment. This happens with the help of an infrared sensor that reacts to the heat of their bodies. The distance sensor is responsible for the safety of moving the robot among people. To search for garbage itself, STB uses a built-in camera in combination with an object recognition algorithm.
When the robot finds the garbage, it begins to perform active “gestures” and make audible signals. Thereby he “asks” people to pick up the garbage and throw it into the container.
Infrared sensors located at the top of the bucket will let you know if the garbage really got to the right place. The robot can even slightly tilt the bucket in any direction, to facilitate the person to perform his task. In general, we have before us an active human-machine cooperation in the preservation of the environment. Moreover, the robot not only acts as a garbage collector, but also serves as an alarm clock for the lovers of conscience to trash them anywhere.
But as the sea does not draw a spoon, so you will not collect all the garbage in small baskets. For this we need more powerful units. For example, such as those developed and tested in the framework of the DustBot project (www.dustbot.org) for developing technologies for robotic cleaning and garbage collection on a small city scale. It involves many experts from Italy, Spain, Britain, Switzerland and Sweden, but the leading role belongs to researchers from the St. Anne Graduate School (Scuola Superiore Sant'Anna), located in Pisa. Financial support for the project is provided by the European Commission (European Commission).
The first robot, called the DustClean, is an autonomous sweeper equipped with rotating brushes and a vacuum cleaner. DustClean cleans the streets, circling the city on a given route, while stopping in front of pedestrians and bypassing obstacles.

DustClean Robot [6]
The second robot, named DustCart, can be called a scavenger. He collects garbage bags of city dwellers and takes them for recycling. The height of the robot is 150 cm, weight is 70 kg, the speed is 1 m / s. One battery charge lasts for 16 km.

Robot DustCart [6]
In order for the garbage truck to arrive at its destination, it will need to be called by telephone. After the arrival of the robot, the client enters his personal code through the screen on the DustCart case. This is necessary, since in the future such systems are supposed to be made paid. At the same time, a person can choose different routes for further transportation of garbage, as well as the type of garbage (organic waste, glass, plastic or paper). After these manipulations, the client places the bag of garbage in the opening hatch of the robot, and he goes to the waste collection point, where he unloads the bag.
Robots from the DustBot project cannot completely solve the problem of garbage collection. Their purpose is more modest - work in places where the usual cleaning equipment does not fit. And there are a lot of such places in European cities. Additionally, the robots are equipped with sensors that determine the content of benzene, oxides of nitrogen, carbon and sulfur in the air, and temperature sensors.
Field tests DastBust-s were held in the Italian town of Pechcholi. The Pechcholi commune is the first settlement in the world in which a separate lane for the movement of robots was allocated on the roads.

DustCart hurries along a dedicated line for another batch of garbage [7]
Next on the scale after DustBot will be the robot ROARY, demonstrated by Volvo. The development was carried out in conjunction with specialists from Chalmers University of Technology, Malardalen University and University of Pennsylvania. The project demonstrates the possibilities of joint work of two robots, which in the future will help facilitate the daily work of urban workers.

ROARY works, reconnaissance drone snoops somewhere nearby [8]
ROARY is transported on a special platform fixed on the back of the garbage truck. The garbage truck itself is barely visible to the right in the photo, so a false impression can be made that ROARY is completely autonomous. In fact, its autonomy is significantly lower than that of DustBot.
Upon arrival, the operator activates the unmanned aerial vehicle mounted on the roof of the car, after which the drone scans the surroundings to detect garbage containers. The system transmits data on the location of the tanks to the robot, which loads the dumpster on a special platform, returns to the garbage truck and raises the tank, clearing it from the garbage. In general, ROARY is adapted for the hardest and dirtiest part of the scavenger job.
For orientation on the ground ROARY uses GPS and lidar, which allow him to avoid collisions with obstacles. Using the built-in camera ROARY can detect an object that is dangerously close to the garbage truck during emptying of the container, and the automated emergency stop function will prevent possible unpleasant consequences. The operator of the garbage truck can also use emergency shutdown.
In general, judging by the three systems considered, robots are quite capable of coping with garbage collection. Especially if people help them a little. This is only fair - everyone should clean up after themselves. But to clean up after others, let alone rake up the waste they have accumulated over the years, no one is obliged against their will. So you have to go back to the robots. More specifically, to the ZenRobotics Recycler (ZRR) system developed by the Finnish company ZenRobotics.
Currently, the classical methodology of garbage pre-sorting is carried out in several stages:
At the third stage, there are people at the conveyor who, with the help of certain instructions and acquired skills, sort the garbage. After that, the waste disintegrated in different containers is sent to special plants for recycling or biofuels. ZenRobotics decided to save people from dirty and monotonous work by creating a special robotic technology that is able to combine all three stages into one.
True, so far we are talking mainly about construction waste, and more specifically about the mountains of garbage remaining after the demolition of old buildings. ZRR consists of 3 main parts. Firstly, these are manipulators, which are standard industrial robots. Secondly, these are sensors for recognizing fragments of garbage - video cameras of various types and metal detectors. Sensors are fixed. Thirdly, industrial computers. The basis of the “intelligence” of ZRR is software that is regularly updated by the company via the Internet.
The ZRR device is clearly represented in the figure depicting the current prototype of a complete industrial system. Construction waste by means of a conveyor is fed under the sensor unit. Sensors recognize each piece of garbage and transmit information to the manipulator control system about its location on the conveyor, its size and material - brick, wood, fittings, etc.

The current prototype ZRR [9]
When the fragment reaches the range of the manipulator, the only thing left to do is to move to the already calculated position, open the gripper according to the fragment size, remove the fragment from the conveyor and throw it into the container with the appropriate fraction.
It is possible that some fragments of garbage will not be reliably identified by sensors. In this case, the manipulators will not sort them at random. Unrecognized fragments will be delivered by a conveyor to a special collection, from where they will be served again to the beginning of the conveyor, under the sensors. Most likely, with a different location on the tape and relative to each other, these fragments can be correctly recognized. The process will continue until the entire batch of garbage is decomposed into fractions.
The ZRR commercial system is more than a prototype, it includes at least two manipulators and bulky containers.

ZRR manipulators at work [10]

ZRR in the minimum commercial version [10]
Based on ZRR, multi-stage sorting systems can be built. Separate installations in such a system work consistently - if a piece of garbage is missed by the first installation, the second one will most likely handle it.
ZRR software can make independent decisions and self-learn. Therefore, human intervention in the system is minimal and is required only for failures.
To be fair, it should be noted that ZRR is not the only possible solution for sorting garbage without the participation (or with minimal participation) of a person. Thus, the German company GUNTHER ENVIROTECH has developed a special sorting plant SPLITTER for sorting solid household waste. This installation does not use sensors, manipulators and complex software. All of them are replaced by screws and shafts of a special form, allowing to separate the garbage in shape, size and weight into 3 fractions.
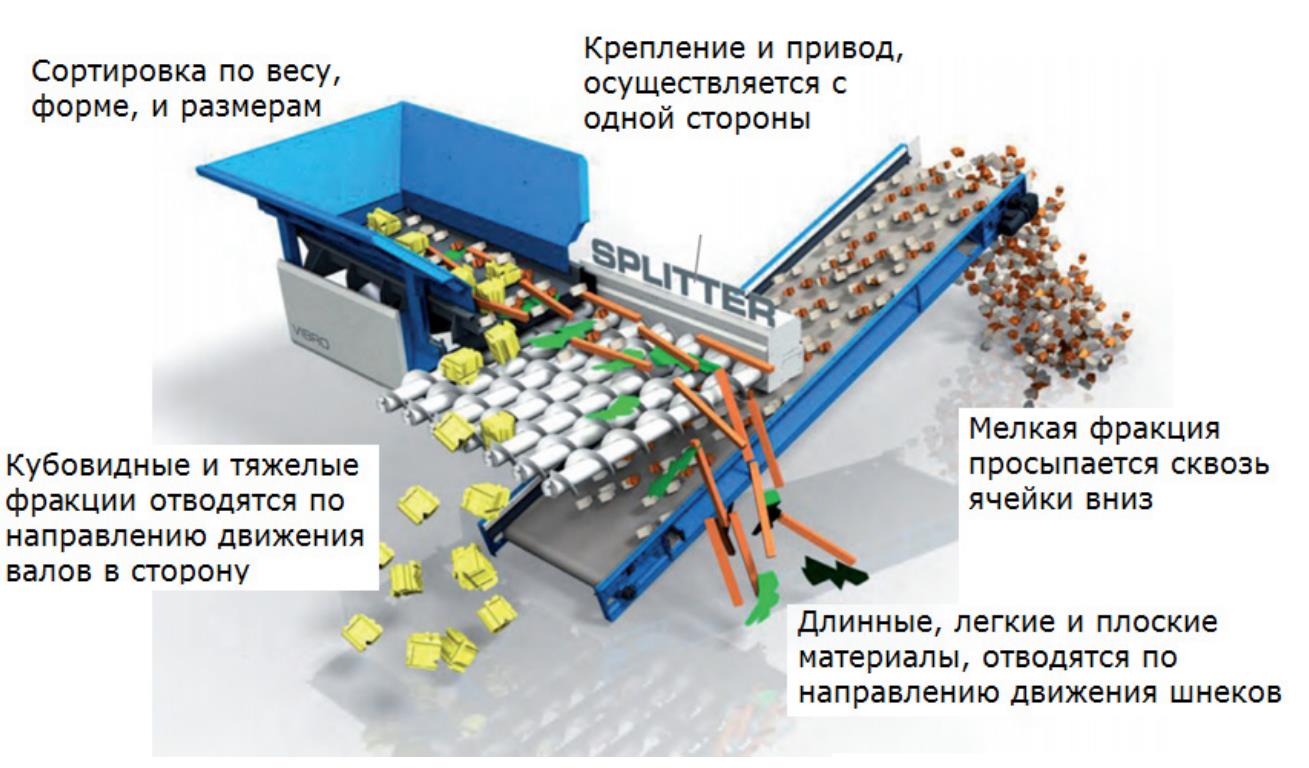
Installing SPLITTER [11]
Despite the simplicity and originality of the design, it is obvious that the SPLITTER is capable of carrying out only rough primary separation of garbage into fractions. If further sorting is necessary, a ZRR type system is required. Thus, these technologies do not compete so much as complement each other when solving the task set by us at the beginning of the article - waste disposal by at least 2/3 with the use of robotics.
And here it turns out that, speaking of waste recycling by 2/3, we significantly underestimate the capabilities of available technologies. Because the systems are already in operation, allowing to increase the utilization rate to 97%!
At the beginning of the 90s, a group of Dutch scientists began research and development of a new technology, the main tasks of which were processing waste without preliminary sorting, obtaining high-quality (including purified from toxic and harmful substances) initial raw materials, as well as cost-effectiveness, profitability and, at the same time, environmental safety.
In 2000, scientists achieved their goal, tested and patented the so-called "3R" technology, combining all of the above principles [12]. The technology is operated by the EPC Group.
The recycling plant, built on the basis of the principles of "3R", is capable of processing:
and much more.
Depending on the tasks, the plant is completed from the necessary independent blocks.
Generalized scheme for recycling using "3R" technology [12]
At the design stage, an analysis of the waste assumed for recycling in the system is carried out. Thus, a qualitative composition is determined for the calculation of efficiency and payback, which the manufacturer can guarantee, as well as the presence of hazardous or radioactive substances in their composition.
The following describes a generalized process for recycling waste at the 3R plant.
Note that biogas from the fermentation unit is used for energy. Thus, the amount of energy produced does not directly depend on the percentage of organic matter in the garbage entering the plant, but only on the time and intensity of fermentation. Therefore, a plant can be made not by a consumer, but by an energy supplier (including for oneself) practically in any case.
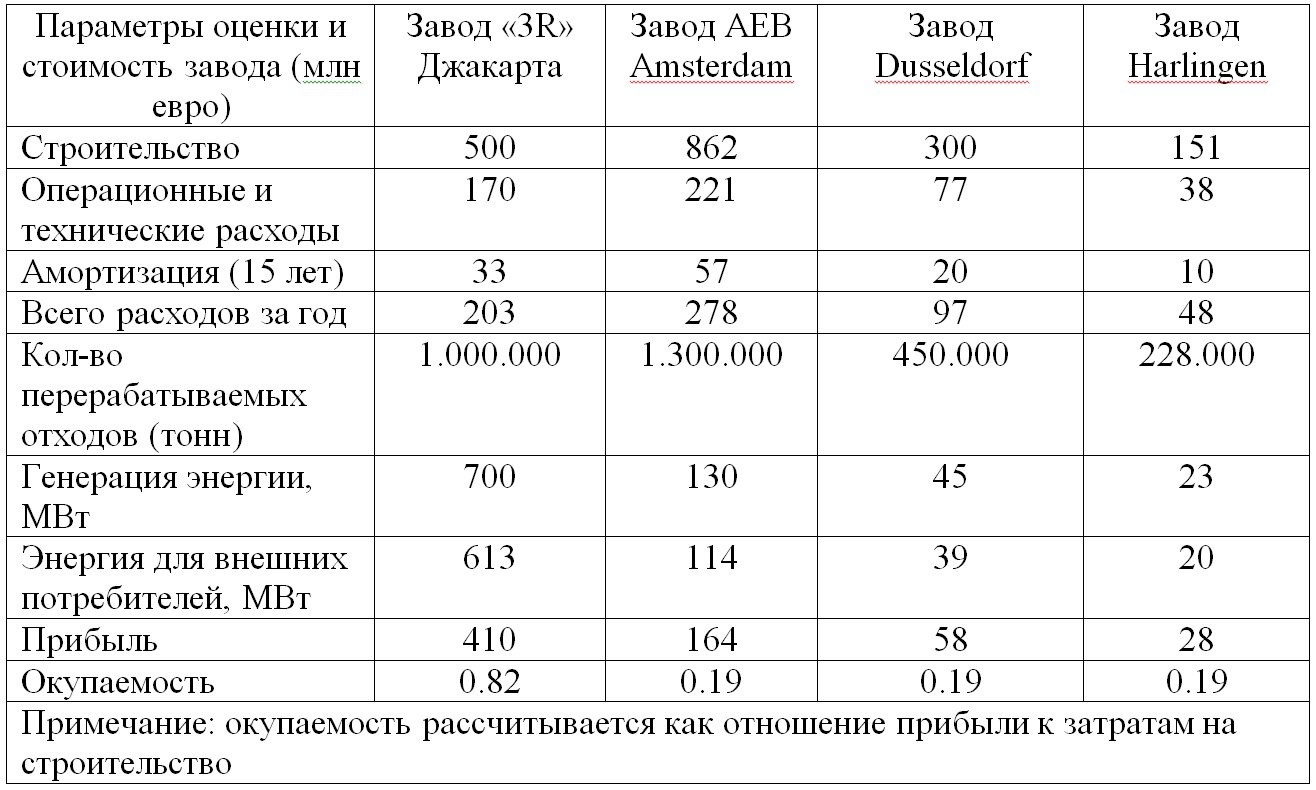
Based on the calculations of the EPC Group, when processing 100 kg of waste, it turns out 97 kg of high-quality ready-made raw materials (the yield and qualitative composition of the raw material depends on the type of waste supplied to the system), and the project payback period will reach 30-50% per year.
According to the 3R technology, several waste recycling plants have already been built, including in Düsseldorf, Amsterdam and Harlingen. A plant is being built in Jakarta. Below is a comparative analysis of the designed plant in Jakarta and existing plants [12].
As can be seen from the table, all 3R plants of the technology not only recycle garbage, but also are sources of energy for external consumers.
To sum up the above, it is obvious that the processes of collecting, sorting and recycling garbage can be almost completely automated, and on the basis of existing technologies. Moreover, automatic waste disposal can bring considerable profit. From a person, in fact, you only need to help the robots in their new noble occupation and, nevertheless, do not throw the wrappers from the ice cream past the robot container hurrying after them. And that is not good somehow work.
Automatic production [1]
Indeed, nothing comes out of nothing. If consumption grows several times, then resources will be needed as many times more. And the environment is already experiencing a critical load on the part of humanity. According to statistics, now one person produces about 3-5 liters of garbage per day, which is up to 120 liters per month, and 1,500 liters per year [9, the error in the source has been corrected due to the dragonnur observation]. To increase production even twice means to provoke an ecological catastrophe. It turns out that robots are somewhat similar to nuclear weapons - with enormous potential (in the case of destructive weapons, for creative robots), their full-scale use is impossible because of the universal tragic consequences.
Frame from the film “Dump”, 2014 [2]
')
Fortunately, robots are not thermonuclear bombs and there is a way out of the contradiction between possibilities and consequences. This output is the robots themselves, adapted for the disposal of production and consumption waste. According to the old principle, similar is treated by similar. If we double the production and at the same time create such robotic systems that will utilize and convert 50% of waste into secondary raw materials or energy, then the load on the environment will not change. If the level of utilization reaches 67%, then production can be increased threefold. And so on.
Naturally, this is an extremely rough scheme. In practice, it is necessary to take into account specific methods and volumes of utilization, the cost of producing additional equipment and many other factors. But it is obvious that the increase in consumption is closely related to the degree of recycling. And since a society with a high level of consumption is not too ready to engage in dirty manual labor, the robots will have to work hard. And they have already begun work.
The task of waste disposal can be divided into three subtasks:
- waste collection;
- their sorting;
- recycling waste.
Let's start with the first. Now you won't surprise anyone with a vacuum cleaner or a window cleaning robot. But this is the simplest robots to collect waste. But, of course, their possibilities are extremely limited, and the corresponding waste - mainly household and street dust - does not arouse interest in terms of further disposal.
IClebo Pop Robot Vacuum Cleaner [3]
Robot for washing windows Windoro WCR-I001 [4]
But the "stray" waste basket is much more efficient than usual. In the laboratory for the development of interactions and communications of the Japanese Technological University Toyohashi created a small trash container on a wheelbase. He received the name Social Trash Box (STB). The robot is equipped with a microprocessor, a video camera and a speaker, as well as infrared sensors and a distance sensor.
Social Trash Box [5]
The robot begins its vigorous activity with determining the place where people are present at the moment. This happens with the help of an infrared sensor that reacts to the heat of their bodies. The distance sensor is responsible for the safety of moving the robot among people. To search for garbage itself, STB uses a built-in camera in combination with an object recognition algorithm.
When the robot finds the garbage, it begins to perform active “gestures” and make audible signals. Thereby he “asks” people to pick up the garbage and throw it into the container.
Infrared sensors located at the top of the bucket will let you know if the garbage really got to the right place. The robot can even slightly tilt the bucket in any direction, to facilitate the person to perform his task. In general, we have before us an active human-machine cooperation in the preservation of the environment. Moreover, the robot not only acts as a garbage collector, but also serves as an alarm clock for the lovers of conscience to trash them anywhere.
But as the sea does not draw a spoon, so you will not collect all the garbage in small baskets. For this we need more powerful units. For example, such as those developed and tested in the framework of the DustBot project (www.dustbot.org) for developing technologies for robotic cleaning and garbage collection on a small city scale. It involves many experts from Italy, Spain, Britain, Switzerland and Sweden, but the leading role belongs to researchers from the St. Anne Graduate School (Scuola Superiore Sant'Anna), located in Pisa. Financial support for the project is provided by the European Commission (European Commission).
The first robot, called the DustClean, is an autonomous sweeper equipped with rotating brushes and a vacuum cleaner. DustClean cleans the streets, circling the city on a given route, while stopping in front of pedestrians and bypassing obstacles.
DustClean Robot [6]
The second robot, named DustCart, can be called a scavenger. He collects garbage bags of city dwellers and takes them for recycling. The height of the robot is 150 cm, weight is 70 kg, the speed is 1 m / s. One battery charge lasts for 16 km.
Robot DustCart [6]
In order for the garbage truck to arrive at its destination, it will need to be called by telephone. After the arrival of the robot, the client enters his personal code through the screen on the DustCart case. This is necessary, since in the future such systems are supposed to be made paid. At the same time, a person can choose different routes for further transportation of garbage, as well as the type of garbage (organic waste, glass, plastic or paper). After these manipulations, the client places the bag of garbage in the opening hatch of the robot, and he goes to the waste collection point, where he unloads the bag.
Robots from the DustBot project cannot completely solve the problem of garbage collection. Their purpose is more modest - work in places where the usual cleaning equipment does not fit. And there are a lot of such places in European cities. Additionally, the robots are equipped with sensors that determine the content of benzene, oxides of nitrogen, carbon and sulfur in the air, and temperature sensors.
Field tests DastBust-s were held in the Italian town of Pechcholi. The Pechcholi commune is the first settlement in the world in which a separate lane for the movement of robots was allocated on the roads.
DustCart hurries along a dedicated line for another batch of garbage [7]
Next on the scale after DustBot will be the robot ROARY, demonstrated by Volvo. The development was carried out in conjunction with specialists from Chalmers University of Technology, Malardalen University and University of Pennsylvania. The project demonstrates the possibilities of joint work of two robots, which in the future will help facilitate the daily work of urban workers.
ROARY works, reconnaissance drone snoops somewhere nearby [8]
ROARY is transported on a special platform fixed on the back of the garbage truck. The garbage truck itself is barely visible to the right in the photo, so a false impression can be made that ROARY is completely autonomous. In fact, its autonomy is significantly lower than that of DustBot.
Upon arrival, the operator activates the unmanned aerial vehicle mounted on the roof of the car, after which the drone scans the surroundings to detect garbage containers. The system transmits data on the location of the tanks to the robot, which loads the dumpster on a special platform, returns to the garbage truck and raises the tank, clearing it from the garbage. In general, ROARY is adapted for the hardest and dirtiest part of the scavenger job.
For orientation on the ground ROARY uses GPS and lidar, which allow him to avoid collisions with obstacles. Using the built-in camera ROARY can detect an object that is dangerously close to the garbage truck during emptying of the container, and the automated emergency stop function will prevent possible unpleasant consequences. The operator of the garbage truck can also use emergency shutdown.
In general, judging by the three systems considered, robots are quite capable of coping with garbage collection. Especially if people help them a little. This is only fair - everyone should clean up after themselves. But to clean up after others, let alone rake up the waste they have accumulated over the years, no one is obliged against their will. So you have to go back to the robots. More specifically, to the ZenRobotics Recycler (ZRR) system developed by the Finnish company ZenRobotics.
Currently, the classical methodology of garbage pre-sorting is carried out in several stages:
- Sort metal / non metal using powerful electromagnets.
- Heavy / not heavy sorting with air blowing.
- Manual stage.
At the third stage, there are people at the conveyor who, with the help of certain instructions and acquired skills, sort the garbage. After that, the waste disintegrated in different containers is sent to special plants for recycling or biofuels. ZenRobotics decided to save people from dirty and monotonous work by creating a special robotic technology that is able to combine all three stages into one.
True, so far we are talking mainly about construction waste, and more specifically about the mountains of garbage remaining after the demolition of old buildings. ZRR consists of 3 main parts. Firstly, these are manipulators, which are standard industrial robots. Secondly, these are sensors for recognizing fragments of garbage - video cameras of various types and metal detectors. Sensors are fixed. Thirdly, industrial computers. The basis of the “intelligence” of ZRR is software that is regularly updated by the company via the Internet.
The ZRR device is clearly represented in the figure depicting the current prototype of a complete industrial system. Construction waste by means of a conveyor is fed under the sensor unit. Sensors recognize each piece of garbage and transmit information to the manipulator control system about its location on the conveyor, its size and material - brick, wood, fittings, etc.
The current prototype ZRR [9]
When the fragment reaches the range of the manipulator, the only thing left to do is to move to the already calculated position, open the gripper according to the fragment size, remove the fragment from the conveyor and throw it into the container with the appropriate fraction.
It is possible that some fragments of garbage will not be reliably identified by sensors. In this case, the manipulators will not sort them at random. Unrecognized fragments will be delivered by a conveyor to a special collection, from where they will be served again to the beginning of the conveyor, under the sensors. Most likely, with a different location on the tape and relative to each other, these fragments can be correctly recognized. The process will continue until the entire batch of garbage is decomposed into fractions.
The ZRR commercial system is more than a prototype, it includes at least two manipulators and bulky containers.
ZRR manipulators at work [10]
ZRR in the minimum commercial version [10]
Based on ZRR, multi-stage sorting systems can be built. Separate installations in such a system work consistently - if a piece of garbage is missed by the first installation, the second one will most likely handle it.
ZRR software can make independent decisions and self-learn. Therefore, human intervention in the system is minimal and is required only for failures.
To be fair, it should be noted that ZRR is not the only possible solution for sorting garbage without the participation (or with minimal participation) of a person. Thus, the German company GUNTHER ENVIROTECH has developed a special sorting plant SPLITTER for sorting solid household waste. This installation does not use sensors, manipulators and complex software. All of them are replaced by screws and shafts of a special form, allowing to separate the garbage in shape, size and weight into 3 fractions.
Installing SPLITTER [11]
Despite the simplicity and originality of the design, it is obvious that the SPLITTER is capable of carrying out only rough primary separation of garbage into fractions. If further sorting is necessary, a ZRR type system is required. Thus, these technologies do not compete so much as complement each other when solving the task set by us at the beginning of the article - waste disposal by at least 2/3 with the use of robotics.
And here it turns out that, speaking of waste recycling by 2/3, we significantly underestimate the capabilities of available technologies. Because the systems are already in operation, allowing to increase the utilization rate to 97%!
At the beginning of the 90s, a group of Dutch scientists began research and development of a new technology, the main tasks of which were processing waste without preliminary sorting, obtaining high-quality (including purified from toxic and harmful substances) initial raw materials, as well as cost-effectiveness, profitability and, at the same time, environmental safety.
In 2000, scientists achieved their goal, tested and patented the so-called "3R" technology, combining all of the above principles [12]. The technology is operated by the EPC Group.
The recycling plant, built on the basis of the principles of "3R", is capable of processing:
- household waste;
- large unground garbage (furniture, building materials, etc.);
- organic waste;
- the contents of landfills;
- unassembled cars and truck parts, batteries, tires;
- electronic and electrical equipment (televisions, refrigerators, etc.);
- medical waste;
- industrial waste;
- batteries, thermometers, lamps
and much more.
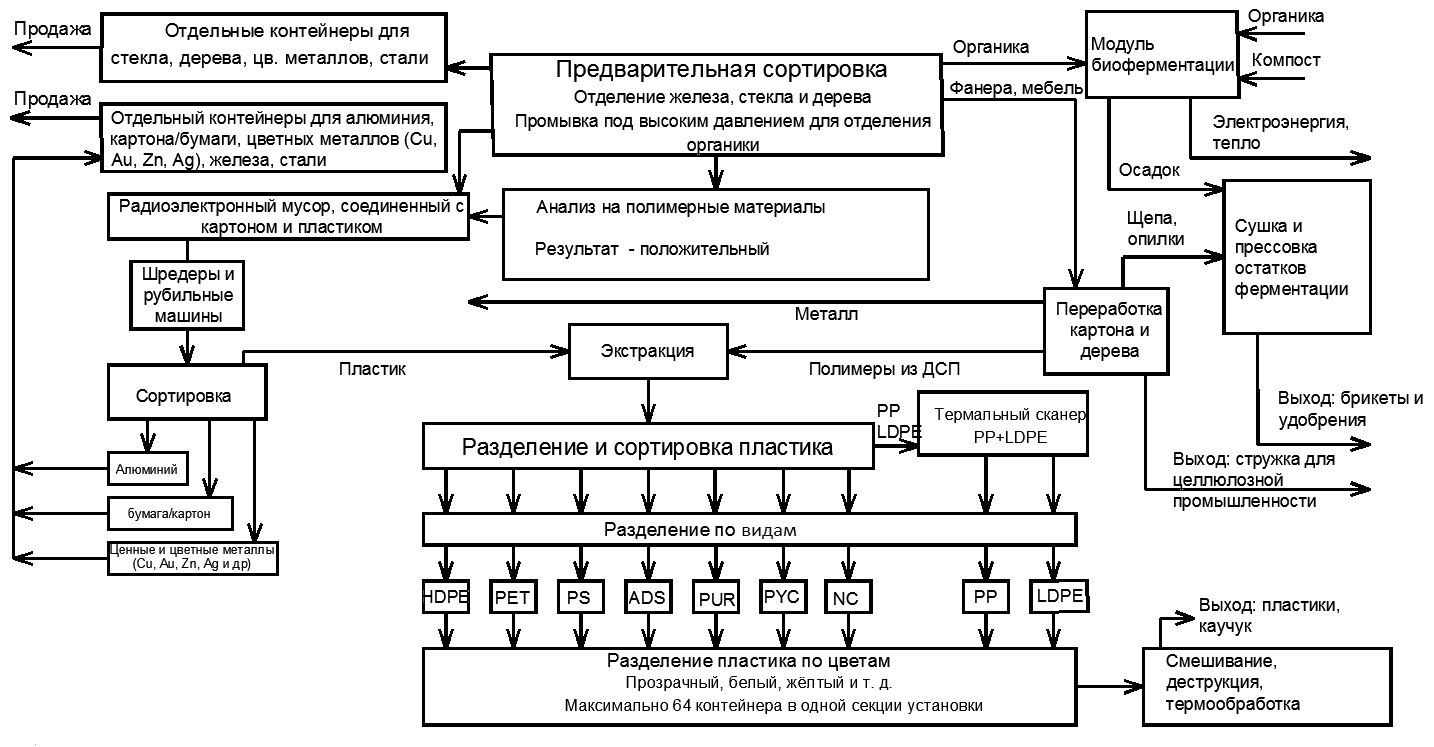
Depending on the tasks, the plant is completed from the necessary independent blocks.
Generalized scheme for recycling using "3R" technology [12]
At the design stage, an analysis of the waste assumed for recycling in the system is carried out. Thus, a qualitative composition is determined for the calculation of efficiency and payback, which the manufacturer can guarantee, as well as the presence of hazardous or radioactive substances in their composition.
The following describes a generalized process for recycling waste at the 3R plant.
- Unsorted waste is automatically sorted directly at the factory. Additional waste analysis is not required before delivery to the plant.
- The recycling process begins with the separation of non-plastic, electrical and electronic components. Further, magnetic materials are separated, as well as wood, glass. All of them are packaged in containers for further sale or processing. At this stage, integration into the “3R” technology of ZRR-type systems is possible to improve the quality and fully automate the sorting.
- The remaining waste containing plastic is analyzed for quality and degree of erosion. After that, they enter the shredders.
- The second sorting of already crushed materials: metals, paper, cardboard are divided and ready for sale.
- Plastics are cleaned of residual products in the extractor. Dyes are separated from materials and can be reused.
- Plastic is sorted by type - PET, PVC, HP, HDPE, PURE, ABS, etc. Plastic processing module includes up to 64 containers for the separation of various types of plastic. Plastic separation takes place with the help of a thermal scanner according to the melting index, since each species has its own melting point.
- Divided by type of plastic is further sorted by color.
- Mixing and pressing: plastics are prepared for sale with the possible consideration of the requirements of the buyer.
- Gas fermentation - organic materials are collected for the production of biofuels.
- Different types of wood are recycled and cleaned for further use in the pulp and paper industry.
- Raw residues from gas fermentation and wood chips from cardboard and wood are delivered to the briquette block, where the mass is dried, ground and pressed into fuel briquettes. Briquettes can also be used in agriculture and farming industry as fertilizer.
Note that biogas from the fermentation unit is used for energy. Thus, the amount of energy produced does not directly depend on the percentage of organic matter in the garbage entering the plant, but only on the time and intensity of fermentation. Therefore, a plant can be made not by a consumer, but by an energy supplier (including for oneself) practically in any case.
Based on the calculations of the EPC Group, when processing 100 kg of waste, it turns out 97 kg of high-quality ready-made raw materials (the yield and qualitative composition of the raw material depends on the type of waste supplied to the system), and the project payback period will reach 30-50% per year.
According to the 3R technology, several waste recycling plants have already been built, including in Düsseldorf, Amsterdam and Harlingen. A plant is being built in Jakarta. Below is a comparative analysis of the designed plant in Jakarta and existing plants [12].
As can be seen from the table, all 3R plants of the technology not only recycle garbage, but also are sources of energy for external consumers.
To sum up the above, it is obvious that the processes of collecting, sorting and recycling garbage can be almost completely automated, and on the basis of existing technologies. Moreover, automatic waste disposal can bring considerable profit. From a person, in fact, you only need to help the robots in their new noble occupation and, nevertheless, do not throw the wrappers from the ice cream past the robot container hurrying after them. And that is not good somehow work.
Sources
1. Characteristic features of the information society. Pros and cons of the information society
2. http://www.world-art.ru/cinema/cinema_photos.php?id=59760&screenshot_number=17
3. How to choose the best robot vacuum cleaner?
4. Robot for washing windows: tips on choosing and feedback on manufacturers
5. A robotic trash can asks people to help him pick up trash.
6. Project DustBot - scavenger robots on the streets of Europe
7. Interesting inventions. Scavenger robot
8. Introduces the first autonomous robot robot ROARY
9. Smart robot for sorting and collecting garbage
10. zenrobotics.com
11. http://www.zaotl.ru/filestore/pdf/_file_1396866305.pdf
12. 3R technology - new in waste recycling
2. http://www.world-art.ru/cinema/cinema_photos.php?id=59760&screenshot_number=17
3. How to choose the best robot vacuum cleaner?
4. Robot for washing windows: tips on choosing and feedback on manufacturers
5. A robotic trash can asks people to help him pick up trash.
6. Project DustBot - scavenger robots on the streets of Europe
7. Interesting inventions. Scavenger robot
8. Introduces the first autonomous robot robot ROARY
9. Smart robot for sorting and collecting garbage
10. zenrobotics.com
11. http://www.zaotl.ru/filestore/pdf/_file_1396866305.pdf
12. 3R technology - new in waste recycling
Source: https://habr.com/ru/post/402311/
All Articles