Robot promoter - Oscar. Head
Hello. Today we will talk about the head of the promotional robot Oscar. It is often interesting for people to communicate with a robot as if they were like themselves: to look in the face and look for an emotional response during a dialogue. Therefore, the head of our promotional robot should be one of the main elements that attract human attention.
To make the head really “alive”, we have outlined the following requirements:
')
- The head must have two degrees of freedom: tilt and turn
- Must be present tracking the interlocutor head
- The eyes of the robot must respond to the interlocutor
Structurally, the head was divided into two parts:
- Neck
- Eyes
Head design
First of all, we started with the design of the head, in order to understand what the form factor will be and how to place everything desired in the head. In general, this process is iterative and sometimes not very easy, especially for engineers who have previously designed only gears.
After a couple of iterations, we received a sketch, which approximately took into account the location of the serv and the mechanics of the eyes.
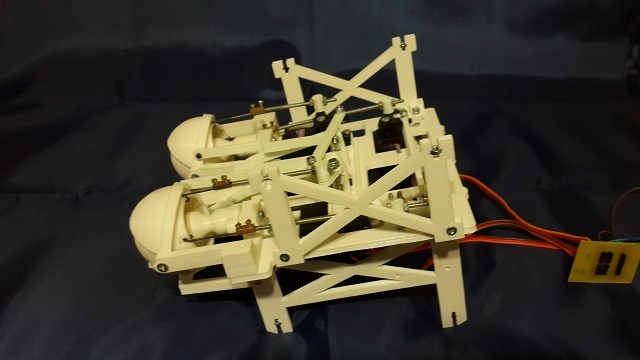
Neck
The head of the robot is equipped with two degrees of freedom: tilt and turn of the head. The basis of the neck design consists of profiles and edges, which we have already used in the manipulator .
To control the degrees of freedom used by our custom serv. We will rotate the head through speed, i.e. the speed of rotation of the head will depend on the position in the frame of the monitored face, the benefit of the server is able to control the speed. The farther the face is from the center, the faster the head will turn. As you approach the center, the speed will decrease to zero. Thus, you get a rather smooth rotation of the head.
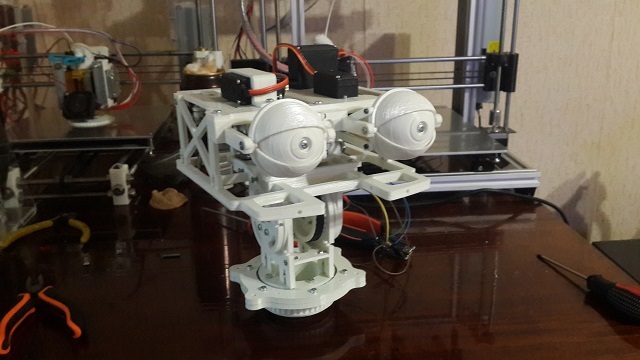
Eyes
We didn’t want to spend much time here either, so we decided to search for existing projects of animatronic eyes, it’s good that such projects are a car and a small truck. Of those found by us, I especially want to mention one project .
We took it as a basis. And everything was fine until we started trying to combine the mechanics of the eyes, the existing head design and the mechanics of the neck. In the end, I had to develop my own “bicycle”. It turned out this design eye:

Eyes work on the basis of arduino_nano. To manage the server took the standard library . Serves are powered from a separate power source, arduino is not capable of producing enough current. At first there were minor problems with the “bounce” that spoiled all the aesthetics. Then they found the cause - a poor-quality power conditioner, replacing it with another similar one - the problem went away. And another thing, the servos do not like long wires, so we removed the extra length between the servos and the controller. The movement of the eyes is realized by setting the angle of rotation of the serva.
As a test, we will use the second face of our state - Dmitry Anatolyevich Medvedev. Suddenly, for hard work, a grant for the development of the project will “fall over”.
How it works?
It all works quite simply, because the head and eyes must respond to the person, then the source of information they will have is identical - a video camera located in the head of the robot. Used camera from Raspberry. By the way, here we made a small mistake - we took a camera with a small viewing angle. In the course of testing, it became clear that it was necessary to put wide-angle cameras - then the facial expression can be made more lively, because you can take your eyes off to a larger angle.
As an image handler, the Raspberry Pi 3 is used. I would like to say that Malinka copes with this task confidently, but at a small resolution, while giving a significant load to all 4 cores.
Face detection is carried out with a classic tool - the Haar cascade. The frequency of face detection is 9 - 12 FPS.
By analogy with a man, the robot first looks at the interlocutor, and then turns his head to him. Despite the relatively high head rotation speed available, we slowed it down. Having brought the speed of head rotation in line with the speed of face detection, we obtained smooth and graceful movements.
We were satisfied with the collected head. What do you think? What else can you add or do?
What's next?
Now we are completing the assembly of the second manipulator, after which we will switch to making the platform with the body. And all this will have to be exposed in a decent body. Let's hope that in the next article we will present our brainchild in full glory.
You keep here, you all the best, good mood and health!
Source: https://habr.com/ru/post/402283/
All Articles