Physicists have learned to tighten the screws with a magnetic field

The magnetic field rotates the individual screws, which, through the ropes, control the movement of the arms, legs, and head of the toy.
There are two ways to remote control a robot. Either you try to equip it with an autonomous propulsion system and navigation system (very difficult), or you make a very small robot that moves in a magnetic field. The robot is controlled by large external magnets. Remote control of such devices is especially in demand in medicine, especially since devices that are even a few microns in size are well controlled by magnetic control. Experiments have already been carried out with remote conducting of a catheter in the heart and control of a video probe in the gastrointestinal tract . The enormous potential of micromachines for drug delivery to specific human organs.
However, many promising applications of magnetic control require coordinated work of not one, but many microrobots at the same time. Until now, scientists have been able to achieve only the simultaneous movement of identical robots in a uniform field, but not arbitrary participants of the swarm. Yes, there was a series of experiments on the individual control of robots from the swarm. But in all cases, these robots must differ from each other in magnetic properties or in construction. That is why the scientific work of physicists from the Philips GmbH Innovative Technologies research laboratory is very interesting. They learned how to tighten the magnetic field in arbitrary places - and successfully conducted experiments on tightening and unscrewing individual screws located next to each other.
At first glance, it is not clear how the twisting of arbitrary screws is related to the control of a swarm of robots in the human body. However, if you think about it, these tasks are very close. After all, the management of a magnetic field with such accuracy allows you to create magnetic traction in specific areas of the human body - exactly where the magnetic device is located that needs to be set in motion.
')
Tighten individual screws with magnetic field
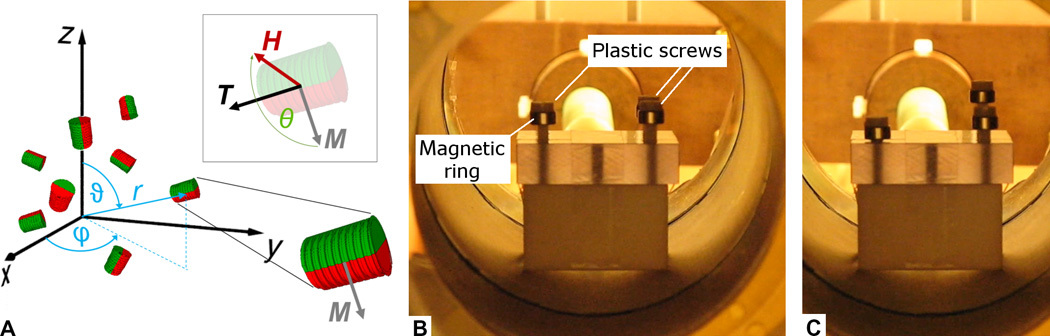
Principle of operation
The illustration below shows a field applicator with a bore diameter of 12 cm. It consists of three pairs of copper coils installed along three spatial axes, and cylindrical iron cores to enhance the field along the z axis. The design is somewhat similar in principle to a magnetic particle imaging (Magnetic Particle Imaging, MPI) device, only here the opposite task is put - not to detect the location of magnetic particles with high accuracy, but to control these objects with the same high accuracy.

If a current of the same amplitude flows in parallel along two coils, then a spatially uniform field arises along the axes, as in the Helmholtz rings . The combination of three pairs of coils allows you to generate homogeneous dynamic fields of arbitrary orientation. If currents of the same amplitude flow in opposite directions, then a pair of coils works like a Maxwell coil , forming a gradient field (in the illustration above right and in the illustration below).

Maxwell Perfect Coil Configuration
When conducting a conceptual experiment, scientists proved that they can tighten the screws, located literally in arbitrary locations inside the field generator.
The illustration shows how the direction of the magnetization vector is calculated and the torque generated. Physics allows you to tighten / unscrew all screws simultaneously or each screw separately.
Scientists believe that the developed device can now be used in medicine. For example, to tighten and loosen the screws that are placed inside the capsules or implants, firmly fixed by the surrounding tissues of the human body. If the capsule is fixed, it will not rotate with the screw. Moreover, the strength of fixation of the capsule can be so high that it allows you to screw in screws or screws directly into the tissue of the human body. For example, in the bone.
It is possible that the twisting of the device with a magnetic field may be applicable to the movement of microrobots in body fluids. In this case, doctors will receive the much-needed selective control of a swarm of microrobots in the human body.
In addition, more complex machines in the human body can be controlled by rotating individual control screws, as shown in the KDPV by the example of the Lego toy (illustration from a scientific work). These can be some kind of complex implants inside the body. It is possible that in orthopedics, the shape of implants will be corrected without the need to use motors or install batteries inside the device. Scientists suggest the practical use of remote rotation of screws in devices for lengthening limbs, for controlling micropumps, for remote release of drugs and for the precise introduction of radioactive grains of type 103 Pd inside cancer tumors (contact radiation therapy).
The scientific article was published on February 15, 2017 in the journal Science Robotics (doi: 10.1126 / scirobotics.aal2845).
Source: https://habr.com/ru/post/401595/
All Articles