Astrobee robot will help astronauts on the ISS

These three robots are predecessors of Astrobee. They passed some tests on the ISS, but the man did not help in any way.
NASA has been using robots on the International Space Station since 2006. For more than 10 years, various systems have been tested on the ISS. One of the most unusual projects was named SPHERES (Synchronized Position Hold, Engage, Re-orient, Experimental Satellites). As part of this project, NASA conducted a trio of robots that spent more than 600 hours at the station. During this time, engineers and scientists were able to conduct a large number of experiments, including the interaction of robots in battery mode, mapping and navigation. At the same time, these robots were not designed to perform any practical work that could help astronauts.
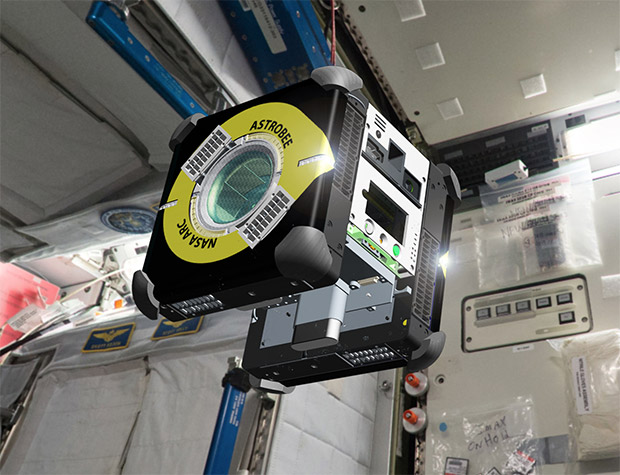
Now is the time for a new generation of robots that can provide direct assistance to people on board the ISS. Astrobee is such a robot. He can remove some of his routine tasks from astronauts, including analyzing air quality, determining the level of noise, and relaying sounds from the station through a microphone and camera. In addition, the robot is equipped with an RFID scanner, it can use some tools, working with them using a small manipulator.
In the fall, NASA revealed the capabilities of its robot at one of NASA 's research centers . It does not look too impressive for its capabilities. In fact, the robot is a cube with a length of 32 centimeters. The body is made of elastic material. Inside - a miniature reactive system that allows the robot to move. In addition, the case contains a large number of sensors, control systems, a touchscreen, and several additional free connectors for adding various hardware, including the arm already mentioned above.
')
In order to test the capabilities of the robot's reactive system, Astrobee was placed on a docking station resembling a sleigh. These "sleds", in turn, are located on one of the faces of a very smooth granite cube. With the help of a jet stream of compressed carbon dioxide, the system easily slides along the surface. Thanks to this, developers can test navigation and jet systems, tweaking various elements if necessary. In space, the robot will soar in zero gravity without any sleigh, moving due to jet propulsion.
NASA's developers claim that Astrobee is not at all the next generation of SPHERE robots . In fact, this is a completely new platform, assembled from scratch and designed to work autonomously on the ISS. One of the most notable additions is the jet propulsion system. It “starts” from electric current, and the robot can be charged in its docking station. SPHERE robots, for example, also knew how to navigate using jet propulsion, but they depended on the charge of their batteries. As mentioned above, adding additional elements to the design of the robot becomes more functional. Modules can be replaced by others, replacing one function with another if necessary.
The difference between the new robot and its predecessors can be called the fact that SPHERES completely depended on the available “charge” of carbon dioxide. It was believed that they can work not only inside the station, but also outside. Astrobee in this sense is very different from its "colleagues". It can move in conditions of weightlessness only if it is in the atmosphere. The robot does not have carbon dioxide charge, therefore its reactive system uses the station air. That is, outside the ISS, he will not be able to move.
The computer control system of the robot captures and throws air in the opposite direction of the intended route. Astrobee can move in any direction.

The photo shows one of the Astrobee jet propulsion modules.
Behind the protective wall of one of the faces of the cube is a fan that sucks in air. There are other similar items. Their movement is designed to minimize gyroscopic forces. This system is constantly working , creating a pocket of compressed air inside the robot. If necessary, the air movement of the system is ejected from the special nozzles. They are located on all faces of the Astrobee case. If the nozzles are closed, the robot does not move. Opening the nozzle means discharging compressed air and moving in the opposite direction.
Total developers have provided 12 nozzles, which are placed in a special order. If you use only one nozzle per unit of time, then the cube in weightlessness will move erratically. Manage it will be very difficult. But if you work immediately with a pair of nozzles, the cube will move balanced.
It is clear that the presence of a system that moves with the help of a jet of air in a closed air space requires the development of special safety measures. If necessary, any of the astronauts can take a cube in hand and move it to a safe place. In addition, the body of the robot is covered with a soft material that minimizes the possible damage from the impact of the robot on any fragile element (laptop display, etc.).
As for the station windows, then for them there is no need to be afraid. They consist of four layers of glass. Two layers are strong glasses that are closed with two more layers of another type of glass. Now NASA needs to prove that under no circumstances will the robot be able to break through one of the layers.
In addition, the developers when creating the Astrobee provided for its complete security. In other words, if the system software is "crazy", the entire system should not cause critical damage to the station. For example, any bug in the software can lead to the fact that the robot will accelerate as much as possible and pass in this mode about 20 meters (the maximum distance in a straight line on the ISS). In this case, you need to be sure that if you strike any element of the station (the same window), it will not suffer critical damage.
Between the individual elements of the robot's jet propulsion system there is a large number of sensors and other equipment that the robot needs for autonomous work. In particular, he may be engaged in the movement of goods. Several faces of the robot are designed to work with weights. Due to the presence of the capture system, the robot can transport it from one end of the station to the other.
The computer system of the robot consists of three levels: low, medium and high. The middle and high levels are almost identical, except that the middle level is Linux-based and is responsible for most of the robot’s functions. But the top level is based on Android and is responsible for working with cargo and transfer them from point to point. This level, according to the developers, is not too complicated, so you can write applications for Android for it, expanding the functionality of the system.
As for the sensors, the Astrobee has a main navigation camera with a field of view of 116 °. In addition, the developers have provided the presence of HD cameras with autofocus, which is able to transmit information from the ISS to Earth in real time. CamBoard Pico Flexx camera allows the device to identify obstacles from a distance of 4 meters. And another optical detector determines the speed of the device. If the speed is too high, a number of engines are turned off to reduce it.
One of the advantages of Astrobee is that the robot is able to move offline on the ISS (everywhere except in the Russian segment). This is a significant achievement of engineers and scientists, since inside the ISS there is a segmented space, and it’s not so easy for a robot to navigate there. However, it is organized very rationally, so the robot does not need to “strain” too much to navigate through the various compartments. There is a main map in the memory of the robot, so that one frame of the environment the robot can understand where it is.
But the interaction with people during the movement - a more difficult task. People move more or less unpredictably, and the robot should not encounter them in the process of moving. In the process of working on Astrobee this problem was solved. By the way, the offline mode of the robot can be disabled and controlled remotely.
To charge the device’s batteries and to retrieve the telemetry data for the robot, we designed a docking station.
As mentioned above, to perform a number of operations for the robot created a manipulator, it was printed on a 3D printer. Most of the time the manipulator is in the folded state, but if necessary it can decompose. Using the camera, the robot recognizes the objects available to it, which it can move. Also with the help of the manipulator Astrobee is able to move around the station space. In this case, you can save battery power. If you use only the manipulator, and turn off the jet system, the power consumption is reduced by 80%.
The “claw” at the end of the manipulator is reliable enough - if the robot is fixed with its help, but it cannot be broken. But nevertheless, if necessary, the astronaut can take off the robot, the compression force is specifically provided at such a level that a person can even take a fixed robot without any problems if something goes wrong.
So why is it needed?
The main task of the robot is to assist astronauts in performing a number of routine tasks. Regardless of whether the robot will function offline or be controlled remotely, it must be able to replace the person. For example, install a camcorder, observe the behavior of various elements inside the station, monitor the operation of the station, monitor the air quality. In particular, determining the level of carbon dioxide concentration is extremely important. This analysis has to be done often, but astronauts do not like this monotonous procedure. But the robot can replace a person in this, and conduct air analysis as often as necessary.
Render of the appearance of the final prototype of the robot
This year the robot will not work on the ISS. NASA claims that it will launch its stations in the 2018 reporting year. Three such robots will be sent at once. Two will perform basic tasks, and the third serves as a supplement. If one of the sent robots breaks, it can be replaced.
Before these robots arrive on the ISS, their predecessors, SPHERES, will already be removed. In the past, the devices showed themselves well, and the data they collected greatly helped scientists to develop a new-generation robot. One robot can significantly relieve the members of the ISS team, and three such robots will completely remove some of the insignificant but time-consuming astronauts.
Source: https://habr.com/ru/post/401509/
All Articles