Iron Company of Fukushima
For some reason, in Russia, few people know about the real state of affairs with the use of various robotics at the emergency site of the Fukushima nuclear power plant. The general public has an unequivocal stereotype:

In fact, in various works during the liquidation of the consequences of the accident at the Fukushima nuclear power plant (I, perhaps, I will write for short on the FNPP) hundreds of units of various remote-controlled robots were used and applied. The scale of the use of remote-controlled vehicles is incomparably greater than at the Chernobyl nuclear power plant, for the simple reasons that all this technology has developed great over the past 30 years and because the accident at the FNPP is more ambitious than at the Chernobyl NPP.
')
Robot vacuum cleaner, Japanese version for Fukushima.
Before looking at the robots, it is worthwhile to imagine at least in general terms what kind of work has been carried out at the FAES for the past 6 years since the accident.
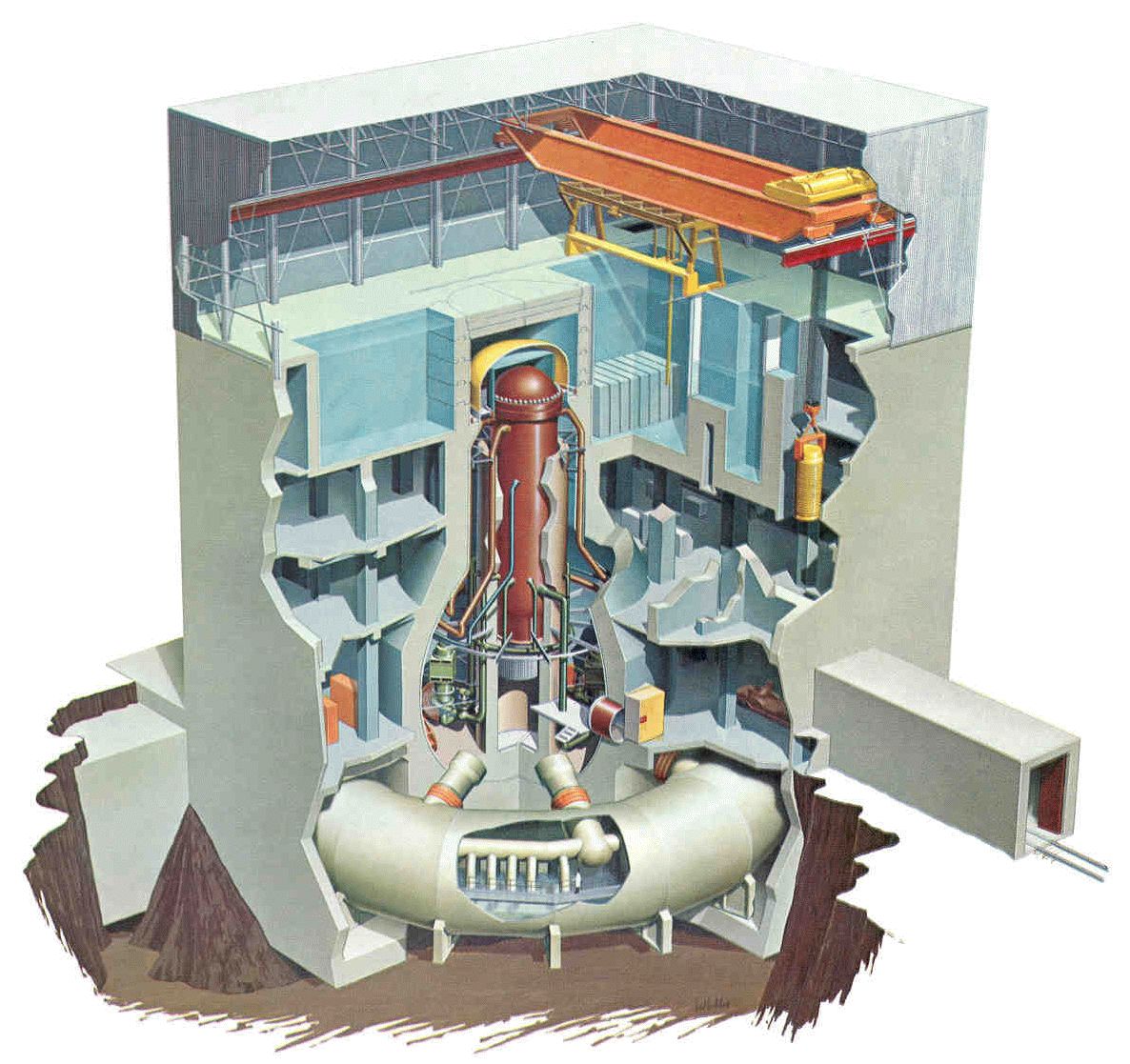
The basic picture of the construction of the Fukushima nuclear power plant is given by this simplified picture: the reactor here in the center (brown) is located in the center of a pear-shaped concrete container, inside which is quite a lot of equipment. A pool to the top of the right of the reactor is an exposure pool, right under the reactor is the drive room of control and protection rods (unlike PWR, in the BWR they are inserted into the AZ from below). A toroidal bubbler pool is located below and around the reactor, designed to condense steam in the event of a major rupture of the main body of the reactor.
After bringing the reactors of blocks 1, 2, 3 into a “cold shutdown” state (ie, cooling the SNF in the reactor to 100 C and below) at the end of 11 years, the following tasks were formulated :

Infographics on the status of blocks at the beginning of 2016.
The entire plan is supposed to be completed in 30-40 years, and the most difficult part here is the unloading of spent nuclear fuel from the aging pools littered with fragments and the removal of corium from the remains of reactor vessels. At the moment, the SNF is completely discharged from unit 4 (where, fortunately, it was not in the reactor, but only in the holding pool - that is, unit 4 can be turned into a green lawn soon enough), and the construction of the containment shell for unloading SNF from unit 3, it is planned to start it in 2017.
With blocks 1 and 2, the situation is the most difficult - here, for the construction of a shelter for cleaning the SNF, you must first disassemble the debris and partially decontaminate to reduce the fields, which is what TEPCO (the owner of the nuclear power plant) now does.

General view of the site of the Fukushima nuclear power plant in 2016. By the way, there is a good plan explaining all these tanks and some buildings.
So, robots are involved in absolutely all the works described above. Yes, of course, these are all remote-controlled machines, mostly cable, I will not go deep into a terminological dispute here, consider such a technique as robots, or only autonomous, and will call them robots.

iRobot Packbot 510 - the first of those used at the NPP.
From the first days of the accident, still on its active part, the question of radiation reconnaissance arose. TEPCO had a fleet of iRobot Packbot robots - a large-scale car, quite convenient for such purposes. They put dosimeters on pakbot (it seems that this is one of the standard options), gamma cameras, pressure sensors, temperature, humidity, and sent them to and around the blocks destroyed by the explosions. Unfortunately, with the movement around the pakbot ladders, everything is bad, and they conducted reconnaissance on the ground floor and outside the blocks.
April training at the site of the nuclear power plant with a robot iRobot warrior.
After some time, they were added a few robots (of similar construction) developed by the FuRO center and Tiba University - Quince, Hibiscus, Sakura, etc., according to developers who have the best intelligence / mechanics when moving around difficult terrain. And indeed, in April-May 2011, these robots allowed to scout the upper floors of the blocks, two of them were lost due to cable breaks.
Quince on intelligence inside the second block of the Fukushima nuclear power plant, April-July 2011.
In addition, at least one Honeywell T-HAWK drone provided by the Japanese military was used for aerial reconnaissance and surveillance. The military was becoming more generous with several more similar to Pakbot and Quince tracked Talon robots. This is a heavier and more secure version in the ideology of Packbot.

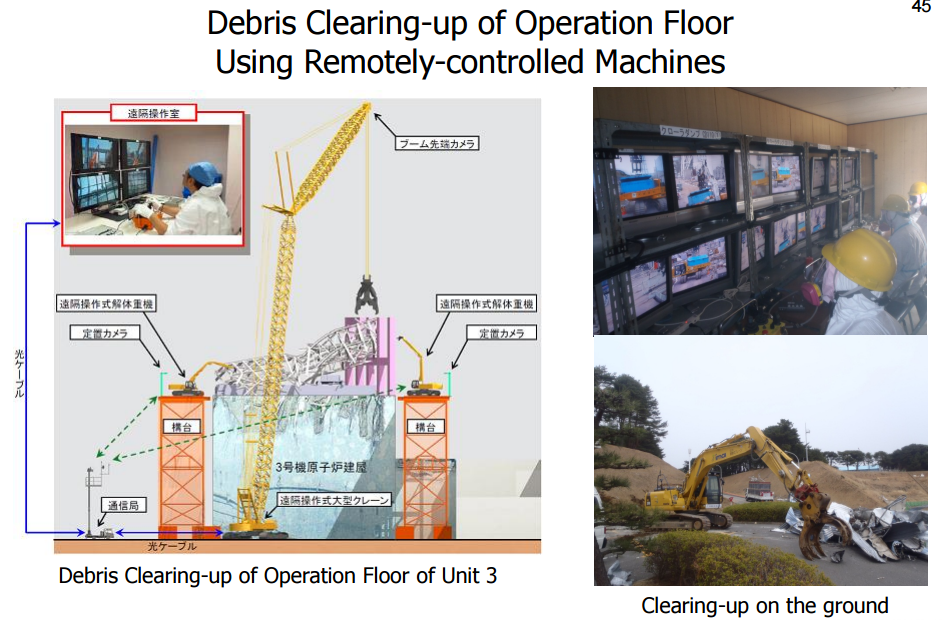
In addition to reconnaissance, almost instantly, in the first weeks, for the removal of debris, the use of converted remote-controlled construction equipment began - several excavators, bulldozers, and trucks, which successfully cleared the aisles between the blocks from radioactive debris.

The robots used to collect radioactive debris on unit 3 in May-June 2011. Including two traditional for the nuclear industry Brokk'a
An interesting application was also found in Putzmeister's robotic concrete pumps - pouring water over the blocks from above and observing the situation from a 70 meter boom. These machines were controlled by radio from lead-protected mobile premises that were installed near the work site.

Telecontrolled Putzmeister with a 62-meter boom, beginning of April 2011, the task is to explore and supply water to the top of the destroyed block.
I think that the instantaneous appearance of such equipment on the site of the FNPP is due to the fact that over the past 10 years it has become popular to add the possibility of external control from the console to construction vehicles essentially a completely electronic control inside, which is already easy to bring to at least another hemisphere of the Earth. Having such a technique, it is enough to load it with cameras and provide the correct telecommunications channel and a remote-controlled robot is ready. Unfortunately, in 1986, to achieve such a result, we had to torment ourselves notably, and in fact the task was never solved - speed in eliminating the consequences of the accident turned out to be more important than the dose load of people.

Finally, even at 2011, the radiation-resistant remote technology standard for the nuclear industry was used at the site of the FNPP: heavy (more than a ton!) BROKK robots and manipulators on Walischmiller bogies - mostly again on disassembling radioactive garbage, working in the “hottest” points.
Strangely enough, the specific problems associated with radiation in all of this technology did not arise - well, or it is somehow silenced (which is doubtful). However, unprotected robotics was used in non-high fields (no higher than 15 roentgens per hour), and for more severe conditions, lead protection was sometimes placed on electronics (for example, on Putzmeister 3 remotely controlled concrete pumps, which stood close to the blocks destroyed by the explosions and filled the water from above)

The radiation situation on 23.03.2011 - a week after the end of the active phase of the accident. The largest figure is 130 mSv - 13 R / h, compare with ~ 1000 R / h on the Chernobyl NPP site on May 6.
However, there is one important point to note. Serial or semi-serial equipment was not sent to the reactor vessel or to the bottom of the containment, where subsequently fields of up to 50,000 r / h were measured. For such tasks, and other specific, such as decontamination of large volumes, reconnaissance under water, removal of debris from spent fuel pools, Japanese corporations since 2011 have led to the development of a mass of various mechanisms, many of which are being commissioned only today. Let's look at them:


Survey runner and FRIGO-MA
Let's start with a more compact version of Pakbot kinematics - Survey runner production TOPY. Not a very interesting robot, however, climbed into the basements of the blocks in 2012. An even smaller version of this scheme called FRIGO-MA, as well as a strange four-legged robot from Toshiba that could produce a separate flat spy, were used to monitor leakage from the reactor piping piping (for a long time the task of finding cooling water leaks was extremely important for the liquidators).
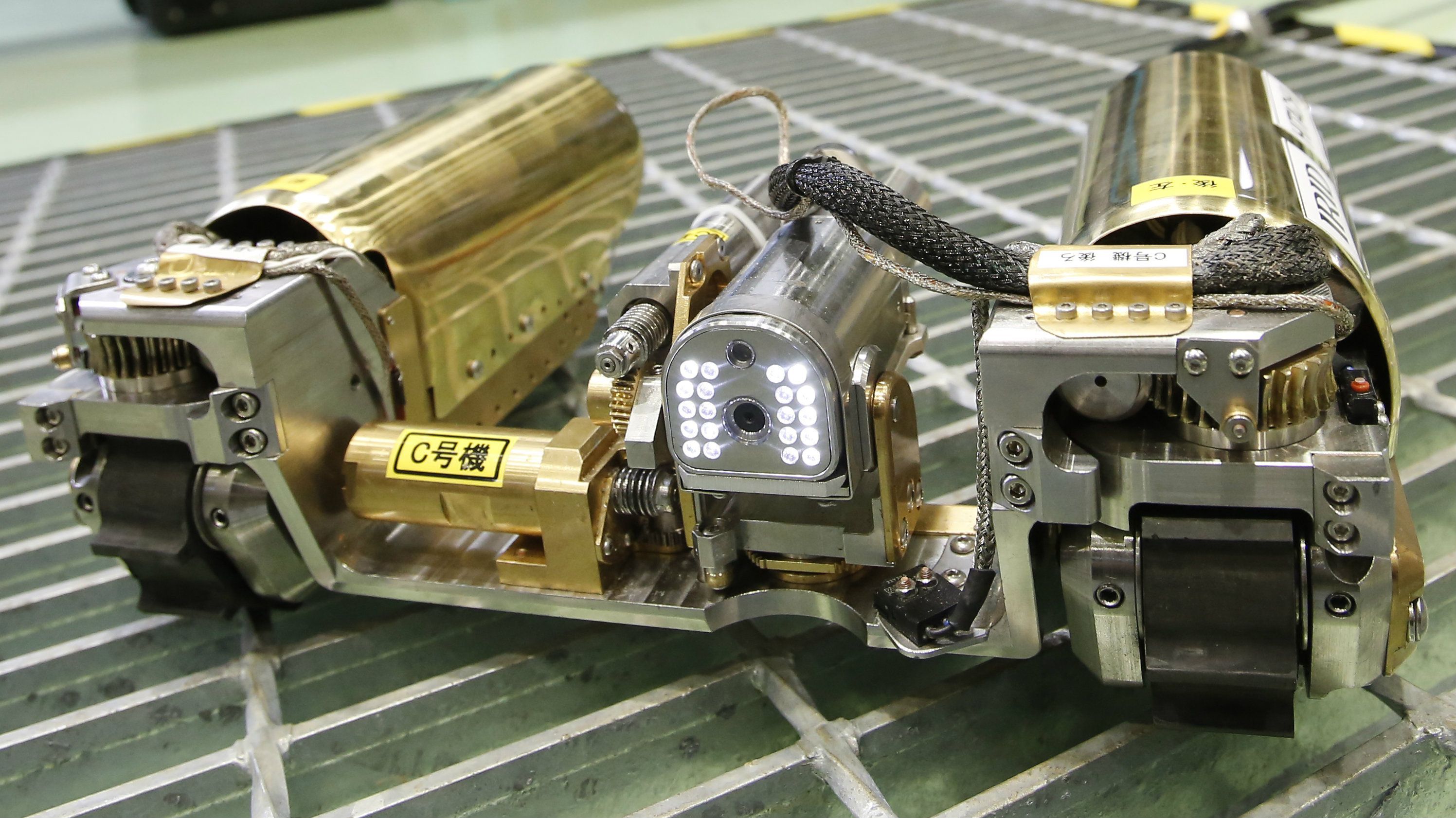
Scorpion developed Toshiba, an even smaller and more durable scout - and this robot walked into bubblers and reactor containers (and one of the scorpions seemed to be the first robot that died from radiation).
Testing "Scorpion" on the layout of the content of 2 blocks. Interestingly, for sending robots, quite a lot of various layouts were built, fairly reliably reproducing many elements of nuclear power plant designs.
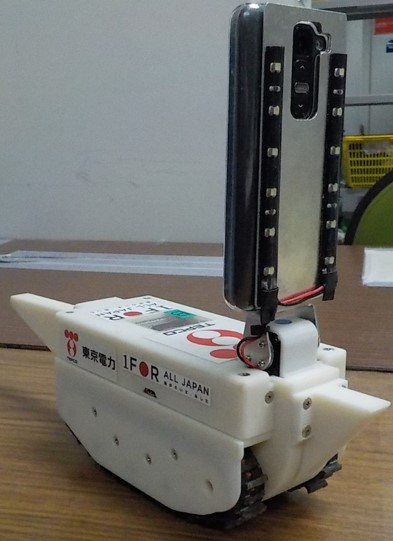
By the way, to the question of small scouts. I liked the photo of this robot - guess what is used as a camera

Toshiba's Scorpion competitor has become a Hitachi Shape-changer, a rather rampant design with interesting kinematics. Two robots of this version were sent to the lower part of the container, carried out reconnaissance in the fields of ~ 500 r / h (5 Sv / h), and found a spray of corium there.


They became the hero of last year's news “TEPCO sent robots to the reactor, and they died from radiation” - in fact, the first robot just got stuck, but the second one really stumbled upon a piece of spent nuclear fuel with a field of 5000-8000 r / h and electronics refused (the irony of fate here is that the term “being conscious” of the car turned out to be very similar to a person). By the way, despite the death, these robots found out quite an important thing - in the container unit 1, the water is at a rather high level, which means it is airtight.
Video shot by one of these scouts.
However, unlike a person, engineers have the opportunity, faced with a problem, try to solve it by inventing a new version. Now Toshiba is experiencing a version of the same small scout Scorpio, equipped with a micro-transceiver and a micronite for pushing pieces of corium. In general, new machines are getting closer to the main unexplored area - the melting points of the reactor vessel and the container with corium, and the mapping of the location of the corium under the reactor in blocks 1,2,3.
At the moment, from non-remote TEPCO methods, it was only possible to lower the radiation-resistant chamber at block 2 to the corium and measure the DER at 530 Sv / h (ie, 53000 p / h). Such a dose rate does not allow us to hope that the reconnaissance / mapping task will be simple — the existing, even radiation-resistant electronics become too unreliable in such conditions, and it is impossible to screen it in a small robot.
By the way, as part of ITER in Europe, they develop a line of radiation-resistant microchips (ADC, DAC, digital interfaces, logic) approximately for such working conditions. Another example of how a “useless” project brings concrete benefits.
Finishing the topic of intelligence, it should be mentioned that TEPCO used several serial underwater autonomous robots and one small remote-controlled boat for reconnaissance of water-filled basements.
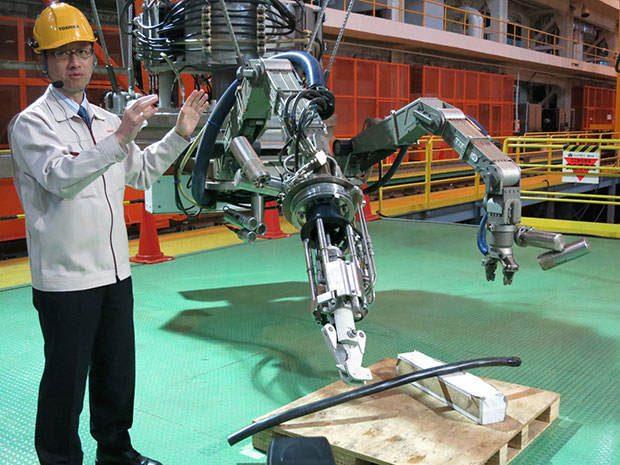
The second main task for the army of TEPCO robots has been and is the analysis of debris, primarily in the framework of the removal of SNF. As I wrote above, initially, at BASP, BROKK and Walischmiller products standard for the nuclear industry and remote-controlled construction equipment were used. However, Hitachi rather quickly developed a special BROKK-like (i.e. heavy self-powered tracked robot powered by an internal combustion engine) ASTACO-SoRa robot.
In the guise of ASTACO-SoRa there is something from the images of Japanese anime.
His task was to disassemble the debris of cables - an object that is often found at nuclear power plants, a complex object for standard manipulators of dismantling robots. Along with the special ASTACO-SoRa and radiation-resistant BROKKs, dismantling robots Husqvarna DXR-140, DX-250 and DX-310 were used. How, you did not know that husqvarna produces robotic destroyers?

Acceptance of Husqvarn in 2012 at the Fukushima nuclear power plant.
Why did you need such devices? Let me remind you that within the framework of the main event for today, namely, the removal of SNF from aging pools, it is necessary to dismantle the rubble around the pools, finish building the shelters, and prepare them in general. And not everywhere the radiation situation allows people to do this, so the abundant shifting of these tasks to dismantling robots is understandable, although the pace of work is falling quite strongly.
Again, in this task, along with all sorts of awkward and slow robots, the remote-controlled construction equipment works.
By the way, about the pace, a small digression. In 1986, the robots moved even more slowly, were even less accurate and reliable, and every day the delay in the disposal of SNF from the roof of the 4 units of the Chernobyl NPP led to an additional removal of radionuclides - wind and water. That is why, trying to fulfill the tasks of cleaning with robots, and making sure that it is too slow, the liquidators of the Chernobyl NPP accident returned to the realization of this task by people. Slowness and unreliability of robotics have become the main reason for its small use, and not radiation and “terrible conditions”, as the developers of those robots like to say. As proof I will give a piece of the documentary video:
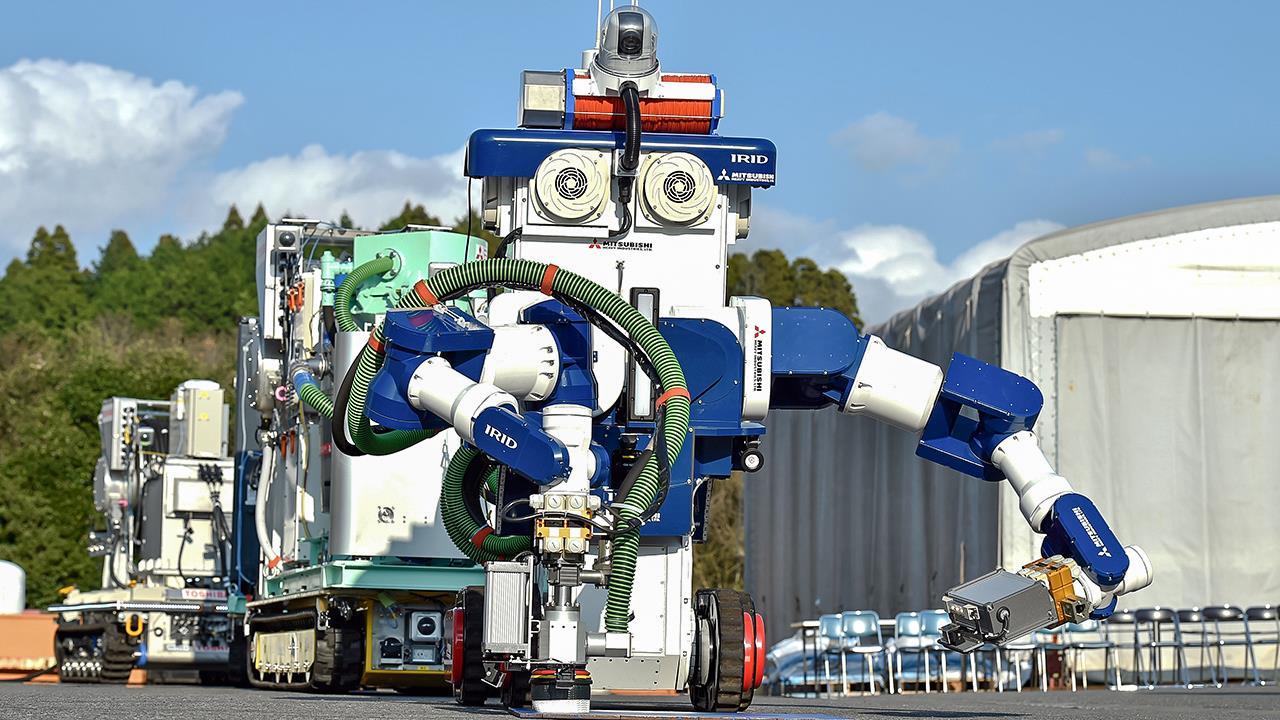
But back to Fukushima. Along with dismantling debris and shipment of solid radioactive waste into containers on contaminated blocks, there was (and is) another unpleasant task — decontamination of walls, floors, ceilings, and so on — all the structural elements that cannot be simply removed from the place of future work. The radionuclides emitted during the active phase of the accident have settled on these surfaces - somewhere they can be washed off, and somewhere they must be stripped off. Ice-blasting is a good option - bombarding surfaces with particles of dry ice (from CO2) with subsequent suction of everything that happened to the filter. However, the system itself for such cleaning is rather cumbersome - for starters, they tried to install it on the same Husqvarna DXR-140 with a weight of 985 kg, but the result was not very good. But we are in Japan! Homeland strange robots! And the result exceeded all expectations.
The robot train is about four trucks, the first of which is equipped with a decontamination manipulator, and the rest carry a system for generating dry ice, a vacuum cleaner, filters, various cleaning fluids, etc.
In general, about a dozen specialized mechanisms were created for the decontamination task, including the most simple to clean the floor and the strangest - to clean the ceiling. At the same time, as far as can be understood, the results are not tests, but real work on the blocks is still quite modest and more similar to the same tests, only in a real situation. Including, the megabarry shown above, while (it seems) did not start blocks yet.

Decontamination technology - a manipulator mounted on the end of a remote-controlled retractable ladder?
Another example of a strange decontamination machine.
Finally, the last most important task for which the Japanese design remote-controlled robots is the clearing of the aging pools. This task is the most difficult, because here, in addition to unstable structures in turbid water, we have to deal with large radiation fields (especially picking up debris from the racks with SNF) and the danger of chain reaction outbreaks - let's say if you drop one fuel assembly to others, it is quite possible.
Video shot by an underwater vehicle in the pool of the third unit. Under this garbage there are several hundred tons of SNF!
To solve this problem, a rather large complex of an underwater remote-controlled robot with two manipulators, suspended on a bridge crane and various lifting devices, has been created. TEPCO is going to start using this complex in 2017 when clearing the BV on the third block, where in 2018 the SNF will begin to be unloaded.
To summarize, I would like to note the following:
1. Liquidation of the consequences of the accident at the Fukushima nuclear power plant has become a place of massive use of remote-controlled equipment, mainly in the tasks of exploration and mapping.
2. With the tasks of the actual elimination (and intelligence in difficult places), the existing serial robots do not really cope. Two or three years after the accident, many new technical options were developed - it is clear that there is a search for forms that are successful and effective for working in conditions of radiation accidents at industrial facilities. In total, by the way, I counted 43 types of remote-controlled vehicles that fell into the frames of TEPCO reports.
3. The work of remote-controlled cars is much slower than with the help of people. This is a well-known problem, and it is associated with both the flawed kinematics and the mobility of the robots themselves, and the difficulty of perception of the situation by the operator through separate cameras: they are trying to solve the second problem with augmented and virtual reality, but such fashionable bells and whistles have not reached the FAES ( but are actively used in developments in universities).
PS For some reason I do not understand, some videos are not picked up, if someone can advise something - advise.
In fact, in various works during the liquidation of the consequences of the accident at the Fukushima nuclear power plant (I, perhaps, I will write for short on the FNPP) hundreds of units of various remote-controlled robots were used and applied. The scale of the use of remote-controlled vehicles is incomparably greater than at the Chernobyl nuclear power plant, for the simple reasons that all this technology has developed great over the past 30 years and because the accident at the FNPP is more ambitious than at the Chernobyl NPP.
')
Robot vacuum cleaner, Japanese version for Fukushima.
Before looking at the robots, it is worthwhile to imagine at least in general terms what kind of work has been carried out at the FAES for the past 6 years since the accident.
The basic picture of the construction of the Fukushima nuclear power plant is given by this simplified picture: the reactor here in the center (brown) is located in the center of a pear-shaped concrete container, inside which is quite a lot of equipment. A pool to the top of the right of the reactor is an exposure pool, right under the reactor is the drive room of control and protection rods (unlike PWR, in the BWR they are inserted into the AZ from below). A toroidal bubbler pool is located below and around the reactor, designed to condense steam in the event of a major rupture of the main body of the reactor.
After bringing the reactors of blocks 1, 2, 3 into a “cold shutdown” state (ie, cooling the SNF in the reactor to 100 C and below) at the end of 11 years, the following tasks were formulated :
- Survey of the radiation situation in hard-to-reach places - the reactor vessel, containment, torus-bubbler and others, where by the end of 2011 the situation was not known (primarily with the remnants of melted fuel)
- Reduction of wind and water removal of radioactivity from reactors - by eliminating leaks (including the notorious ice wall), closing panels of the walls of buildings, collecting contaminated garbage into containers, where this has not yet been done
- Preparation of sites for SNF unloading from the storage pools of all 4 blocks - cleaning of destroyed structures, mapping of debris in the cooling pools and their cleaning, organization of temporary structures above the pools, and finally - unloading of SNF into containers
- Maximum decontamination of facilities (i.e. cleaning of surface contaminants. This is mainly in the interests of SNF disposal operations - in order to reduce the dose load of personnel who will perform this work
- Sealing of reactor containment and subsequent pumping of radioactive water from the buildings of power units
- Disassembly of highly radioactive fused fuel residues (corium) in 1,2,3 blocks
- After the blocks are released from nuclear and radiation hazardous items - disassembly and organization of the “green site”
Infographics on the status of blocks at the beginning of 2016.
The entire plan is supposed to be completed in 30-40 years, and the most difficult part here is the unloading of spent nuclear fuel from the aging pools littered with fragments and the removal of corium from the remains of reactor vessels. At the moment, the SNF is completely discharged from unit 4 (where, fortunately, it was not in the reactor, but only in the holding pool - that is, unit 4 can be turned into a green lawn soon enough), and the construction of the containment shell for unloading SNF from unit 3, it is planned to start it in 2017.
With blocks 1 and 2, the situation is the most difficult - here, for the construction of a shelter for cleaning the SNF, you must first disassemble the debris and partially decontaminate to reduce the fields, which is what TEPCO (the owner of the nuclear power plant) now does.
General view of the site of the Fukushima nuclear power plant in 2016. By the way, there is a good plan explaining all these tanks and some buildings.
So, robots are involved in absolutely all the works described above. Yes, of course, these are all remote-controlled machines, mostly cable, I will not go deep into a terminological dispute here, consider such a technique as robots, or only autonomous, and will call them robots.
iRobot Packbot 510 - the first of those used at the NPP.
From the first days of the accident, still on its active part, the question of radiation reconnaissance arose. TEPCO had a fleet of iRobot Packbot robots - a large-scale car, quite convenient for such purposes. They put dosimeters on pakbot (it seems that this is one of the standard options), gamma cameras, pressure sensors, temperature, humidity, and sent them to and around the blocks destroyed by the explosions. Unfortunately, with the movement around the pakbot ladders, everything is bad, and they conducted reconnaissance on the ground floor and outside the blocks.
April training at the site of the nuclear power plant with a robot iRobot warrior.
After some time, they were added a few robots (of similar construction) developed by the FuRO center and Tiba University - Quince, Hibiscus, Sakura, etc., according to developers who have the best intelligence / mechanics when moving around difficult terrain. And indeed, in April-May 2011, these robots allowed to scout the upper floors of the blocks, two of them were lost due to cable breaks.
Quince on intelligence inside the second block of the Fukushima nuclear power plant, April-July 2011.
In addition, at least one Honeywell T-HAWK drone provided by the Japanese military was used for aerial reconnaissance and surveillance. The military was becoming more generous with several more similar to Pakbot and Quince tracked Talon robots. This is a heavier and more secure version in the ideology of Packbot.
In addition to reconnaissance, almost instantly, in the first weeks, for the removal of debris, the use of converted remote-controlled construction equipment began - several excavators, bulldozers, and trucks, which successfully cleared the aisles between the blocks from radioactive debris.
The robots used to collect radioactive debris on unit 3 in May-June 2011. Including two traditional for the nuclear industry Brokk'a
An interesting application was also found in Putzmeister's robotic concrete pumps - pouring water over the blocks from above and observing the situation from a 70 meter boom. These machines were controlled by radio from lead-protected mobile premises that were installed near the work site.
Telecontrolled Putzmeister with a 62-meter boom, beginning of April 2011, the task is to explore and supply water to the top of the destroyed block.
I think that the instantaneous appearance of such equipment on the site of the FNPP is due to the fact that over the past 10 years it has become popular to add the possibility of external control from the console to construction vehicles essentially a completely electronic control inside, which is already easy to bring to at least another hemisphere of the Earth. Having such a technique, it is enough to load it with cameras and provide the correct telecommunications channel and a remote-controlled robot is ready. Unfortunately, in 1986, to achieve such a result, we had to torment ourselves notably, and in fact the task was never solved - speed in eliminating the consequences of the accident turned out to be more important than the dose load of people.
Finally, even at 2011, the radiation-resistant remote technology standard for the nuclear industry was used at the site of the FNPP: heavy (more than a ton!) BROKK robots and manipulators on Walischmiller bogies - mostly again on disassembling radioactive garbage, working in the “hottest” points.
Strangely enough, the specific problems associated with radiation in all of this technology did not arise - well, or it is somehow silenced (which is doubtful). However, unprotected robotics was used in non-high fields (no higher than 15 roentgens per hour), and for more severe conditions, lead protection was sometimes placed on electronics (for example, on Putzmeister 3 remotely controlled concrete pumps, which stood close to the blocks destroyed by the explosions and filled the water from above)
The radiation situation on 23.03.2011 - a week after the end of the active phase of the accident. The largest figure is 130 mSv - 13 R / h, compare with ~ 1000 R / h on the Chernobyl NPP site on May 6.
However, there is one important point to note. Serial or semi-serial equipment was not sent to the reactor vessel or to the bottom of the containment, where subsequently fields of up to 50,000 r / h were measured. For such tasks, and other specific, such as decontamination of large volumes, reconnaissance under water, removal of debris from spent fuel pools, Japanese corporations since 2011 have led to the development of a mass of various mechanisms, many of which are being commissioned only today. Let's look at them:
Survey runner and FRIGO-MA
Let's start with a more compact version of Pakbot kinematics - Survey runner production TOPY. Not a very interesting robot, however, climbed into the basements of the blocks in 2012. An even smaller version of this scheme called FRIGO-MA, as well as a strange four-legged robot from Toshiba that could produce a separate flat spy, were used to monitor leakage from the reactor piping piping (for a long time the task of finding cooling water leaks was extremely important for the liquidators).
Scorpion developed Toshiba, an even smaller and more durable scout - and this robot walked into bubblers and reactor containers (and one of the scorpions seemed to be the first robot that died from radiation).
Testing "Scorpion" on the layout of the content of 2 blocks. Interestingly, for sending robots, quite a lot of various layouts were built, fairly reliably reproducing many elements of nuclear power plant designs.
By the way, to the question of small scouts. I liked the photo of this robot - guess what is used as a camera
Toshiba's Scorpion competitor has become a Hitachi Shape-changer, a rather rampant design with interesting kinematics. Two robots of this version were sent to the lower part of the container, carried out reconnaissance in the fields of ~ 500 r / h (5 Sv / h), and found a spray of corium there.
They became the hero of last year's news “TEPCO sent robots to the reactor, and they died from radiation” - in fact, the first robot just got stuck, but the second one really stumbled upon a piece of spent nuclear fuel with a field of 5000-8000 r / h and electronics refused (the irony of fate here is that the term “being conscious” of the car turned out to be very similar to a person). By the way, despite the death, these robots found out quite an important thing - in the container unit 1, the water is at a rather high level, which means it is airtight.
Video shot by one of these scouts.
However, unlike a person, engineers have the opportunity, faced with a problem, try to solve it by inventing a new version. Now Toshiba is experiencing a version of the same small scout Scorpio, equipped with a micro-transceiver and a micronite for pushing pieces of corium. In general, new machines are getting closer to the main unexplored area - the melting points of the reactor vessel and the container with corium, and the mapping of the location of the corium under the reactor in blocks 1,2,3.
At the moment, from non-remote TEPCO methods, it was only possible to lower the radiation-resistant chamber at block 2 to the corium and measure the DER at 530 Sv / h (ie, 53000 p / h). Such a dose rate does not allow us to hope that the reconnaissance / mapping task will be simple — the existing, even radiation-resistant electronics become too unreliable in such conditions, and it is impossible to screen it in a small robot.
By the way, as part of ITER in Europe, they develop a line of radiation-resistant microchips (ADC, DAC, digital interfaces, logic) approximately for such working conditions. Another example of how a “useless” project brings concrete benefits.
Finishing the topic of intelligence, it should be mentioned that TEPCO used several serial underwater autonomous robots and one small remote-controlled boat for reconnaissance of water-filled basements.
The second main task for the army of TEPCO robots has been and is the analysis of debris, primarily in the framework of the removal of SNF. As I wrote above, initially, at BASP, BROKK and Walischmiller products standard for the nuclear industry and remote-controlled construction equipment were used. However, Hitachi rather quickly developed a special BROKK-like (i.e. heavy self-powered tracked robot powered by an internal combustion engine) ASTACO-SoRa robot.
In the guise of ASTACO-SoRa there is something from the images of Japanese anime.
His task was to disassemble the debris of cables - an object that is often found at nuclear power plants, a complex object for standard manipulators of dismantling robots. Along with the special ASTACO-SoRa and radiation-resistant BROKKs, dismantling robots Husqvarna DXR-140, DX-250 and DX-310 were used. How, you did not know that husqvarna produces robotic destroyers?
Acceptance of Husqvarn in 2012 at the Fukushima nuclear power plant.
Why did you need such devices? Let me remind you that within the framework of the main event for today, namely, the removal of SNF from aging pools, it is necessary to dismantle the rubble around the pools, finish building the shelters, and prepare them in general. And not everywhere the radiation situation allows people to do this, so the abundant shifting of these tasks to dismantling robots is understandable, although the pace of work is falling quite strongly.
Again, in this task, along with all sorts of awkward and slow robots, the remote-controlled construction equipment works.
By the way, about the pace, a small digression. In 1986, the robots moved even more slowly, were even less accurate and reliable, and every day the delay in the disposal of SNF from the roof of the 4 units of the Chernobyl NPP led to an additional removal of radionuclides - wind and water. That is why, trying to fulfill the tasks of cleaning with robots, and making sure that it is too slow, the liquidators of the Chernobyl NPP accident returned to the realization of this task by people. Slowness and unreliability of robotics have become the main reason for its small use, and not radiation and “terrible conditions”, as the developers of those robots like to say. As proof I will give a piece of the documentary video:
But back to Fukushima. Along with dismantling debris and shipment of solid radioactive waste into containers on contaminated blocks, there was (and is) another unpleasant task — decontamination of walls, floors, ceilings, and so on — all the structural elements that cannot be simply removed from the place of future work. The radionuclides emitted during the active phase of the accident have settled on these surfaces - somewhere they can be washed off, and somewhere they must be stripped off. Ice-blasting is a good option - bombarding surfaces with particles of dry ice (from CO2) with subsequent suction of everything that happened to the filter. However, the system itself for such cleaning is rather cumbersome - for starters, they tried to install it on the same Husqvarna DXR-140 with a weight of 985 kg, but the result was not very good. But we are in Japan! Homeland strange robots! And the result exceeded all expectations.
The robot train is about four trucks, the first of which is equipped with a decontamination manipulator, and the rest carry a system for generating dry ice, a vacuum cleaner, filters, various cleaning fluids, etc.
In general, about a dozen specialized mechanisms were created for the decontamination task, including the most simple to clean the floor and the strangest - to clean the ceiling. At the same time, as far as can be understood, the results are not tests, but real work on the blocks is still quite modest and more similar to the same tests, only in a real situation. Including, the megabarry shown above, while (it seems) did not start blocks yet.
Decontamination technology - a manipulator mounted on the end of a remote-controlled retractable ladder?
Another example of a strange decontamination machine.
Finally, the last most important task for which the Japanese design remote-controlled robots is the clearing of the aging pools. This task is the most difficult, because here, in addition to unstable structures in turbid water, we have to deal with large radiation fields (especially picking up debris from the racks with SNF) and the danger of chain reaction outbreaks - let's say if you drop one fuel assembly to others, it is quite possible.
Video shot by an underwater vehicle in the pool of the third unit. Under this garbage there are several hundred tons of SNF!
To solve this problem, a rather large complex of an underwater remote-controlled robot with two manipulators, suspended on a bridge crane and various lifting devices, has been created. TEPCO is going to start using this complex in 2017 when clearing the BV on the third block, where in 2018 the SNF will begin to be unloaded.
To summarize, I would like to note the following:
1. Liquidation of the consequences of the accident at the Fukushima nuclear power plant has become a place of massive use of remote-controlled equipment, mainly in the tasks of exploration and mapping.
2. With the tasks of the actual elimination (and intelligence in difficult places), the existing serial robots do not really cope. Two or three years after the accident, many new technical options were developed - it is clear that there is a search for forms that are successful and effective for working in conditions of radiation accidents at industrial facilities. In total, by the way, I counted 43 types of remote-controlled vehicles that fell into the frames of TEPCO reports.
3. The work of remote-controlled cars is much slower than with the help of people. This is a well-known problem, and it is associated with both the flawed kinematics and the mobility of the robots themselves, and the difficulty of perception of the situation by the operator through separate cameras: they are trying to solve the second problem with augmented and virtual reality, but such fashionable bells and whistles have not reached the FAES ( but are actively used in developments in universities).
PS For some reason I do not understand, some videos are not picked up, if someone can advise something - advise.
Source: https://habr.com/ru/post/401239/
All Articles