Multicopters have learned how to sit down on the roofs of moving cars

The drone sits on the roof of the car at a speed of 50 km / h
The ability of multikopters to hover statically makes them an excellent tool for performing various tasks, including video surveillance, parcel delivery, or participation in search and rescue operations. At the same time, they have to put up with a limit on battery life and a relatively small radius of action. The battery charge is not enough to get to the place, if it is located many kilometers from the base. Engineers from the laboratory of mobile robotic and autonomous systems of the Polytechnic School of Montreal (Canada) offered an original solution to the problem: the drone along the way taught to sit down on the roofs of passing vehicles moving at speeds up to 50 km / h. Passing cars literally turn into aircraft carriers.
If the police have the full right to use civilian vehicles for their needs, then police drones can give such a right. One can imagine that even for civilian UAVs, a system of “commercial partnership” will be introduced, so that drivers will be paid a small reward if an unmanned passenger is attached to the roof. According to the tariff for each kilometer. The multi-rotor will recognize cars (by GPS coordinates and visually) and only sit on the roofs of those participating in the affiliate program.
Actually, with the current technology, the drone is simply not able to sit on the roofs of arbitrary cars, because in order to aim it requires a landing pad on the roof with a special black and white code AprilTag.
')

The roof of an ordinary car is not very suitable for the equipment of such a site. System developers believe that public transport (buses), mail trucks and delivery services are suitable as aircraft carriers. These cars are actively romp around the city, so that for the drone it will not be a problem “for free” to jump a dozen kilometers to the destination.
In theory, it is possible to equip such landing areas and the roofs of cars. During test flights, researchers have shown that even a relatively small area on a “car” is enough for landing.

The drone sits on the roof of the car at a speed of 40 km / h
The advantage of this method of transportation is that the drone on the roof can charge its batteries. Thus, two existing problems of the UAV are solved at once - insufficient battery charge and a small radius of action.
Developed by Canadian engineers, the unmanned landing system uses the GPS coordinates of a mobile phone to search for a vehicle, and during landing it does not require coordination of maneuvers between the UAV and the car. That is, no assistance is required from the driver at all, except for installing a landing platform with a visual marker and a mobile phone on the roof. Theoretically, the driver during a trip may not even notice that someone used his car on the road.
A key element when landing a drone on the roof of a car are AprilTag black and white visual markers, which have recently been increasingly used in robotics. Developed by Olson in 2011, such markers play the role of both visual identification and accurate 3D positioning of the object relative to the camera.

For aiming the drone and coordinating with the platform in six degrees of freedom, a 30 × 30 cm marker is used. As an auxiliary information, an approximate estimate of the coordinates and speed of the vehicle, which comes from the GPS and IMU modules of the mobile phone, is sufficient.
The quadcopter is equipped with an inertial navigation system (INS), a three-axis propeller camera (with a separate IMU) for tracking the target, and a wide-angle down camera that tracks the AprilTag marker at close distance in the last seconds of the maneuver. The developers note that at the stage of approaching the car, the UAV can also use the speed sensor, which is installed on many modern quadcopters. These sensors calculate the speed of a sequence of photo frames.

Estimation of the relative location, speed and acceleration is calculated on the on-board computer using the Kalman filter at a frequency of 100 Hz. This is an effective recursive filter that evaluates the state vector of a dynamic system using a series of incomplete and noisy measurements.

Experiments have shown that the multicopter successfully sits on cars at speeds up to 50 km / h. With increasing speed increases the risk of stalling from the edge of the platform. Perhaps this problem can be solved if we increase the speed of information processing from the drone cameras.
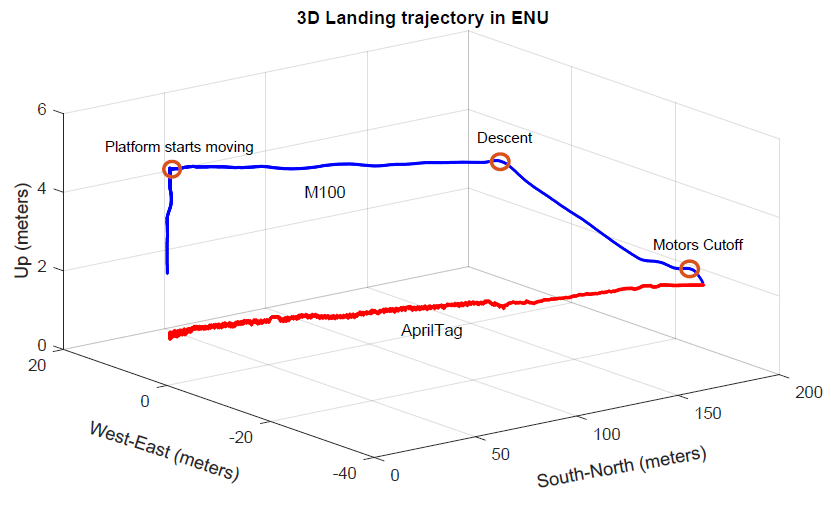
Landing trajectory at a speed of 50 km / h
The scientific article was prepared for the IFAC 2017 world congress and was published on November 22, 2016 on the site arXiv.org (arXiv: 1611.07329).
Source: https://habr.com/ru/post/399463/
All Articles