How to make an all-terrain racing car out of a child quad bike

Nothing in this world is forever, but some Chinese products simply surprise with their “durability”. I will talk about my experience in modernizing a children's quad bike.
What we have: a children's quad bike KL-789 with minor irregularities, some free time and a desire to stick a dead Arduin there.
')
What we want to get: something working longer than one month, preferably with improved driving characteristics.
The ATV has two RS550 collector motors at 12V, with a shaft rotational speed of 19,300 rpm idling, connected to the rear wheels with a diameter of ~ 30 cm via gearboxes with a transmission ratio of ~ 131. Simple mathematics says that the maximum speed of this vehicle should be 19300/131/60 * 3.14 * 0.3 = 2.31 m / s or 8.3 km / h. In practice, he drives about 7 km / h. During the selection of new components in me fought the desire to make the maximum speed, and the fear that this would be too dangerous transport for children. Therefore, it was decided that he should go 1.5-2 times faster. In addition to engines, I was not satisfied with it:
- Battery. Gel 12V 10Ah, losing most of the capacitance at a high discharge current
- Control system. The first speed is the pedal, the engines are connected in series. The second speed-handle on the steering wheel, the engines are connected in parallel. The brake is automatic when the pedal is released, the motor windings close. This scheme leads to a too sharp start, the complete absence of free rolling, the same sharp brake, all this leads to high current loads (the pedal button melted during the month of operation), and mechanical loads on gearboxes and wheels, not to mention banal non-comfort ride
- Power wires. Section 0.75-1 square. mm, which with a rated current of 20A are heated to a significant temperature
Those. I was not satisfied with absolutely all electrics. A little thought, it was decided to use:
- Two lithium batteries at 11.1V with a maximum (promised) current of 240A each (yes, they can start the car, checked)
- Two sensory BK motors at 36,000 rpm with nominal 11.1V, and ~ 40000 rpm with fully charged batteries
- Two touch-sensitive BC regulators for 120A (I love everything with a margin)
- Proportional throttle knob based on Hall sensor
- Five-way gear selector , we will have three speeds forward, one back and neutral
- Current sensor 100A
- Bluetooth module for telemetry on the phone
- Headlights
- Stop / rear clearance, red , red
- Beep , where do without it
- FET module , 4 channel, for control of headlights
- Teensy 2.0 , as the controller of all this
- Two-section light switch
- Well, a little bit of all small things - a dongle for adjusting and flashing regulators , connectors , wires , shrinking , a tool for removing pinien from a stock motor
In addition, to reduce the roar of plastic wheels and improve the ride smoothness, 4 12.5 "tires were bought for baby carriages, after which they were slightly modified with a stationery knife, and then stretched over the wheels of an ATV, and secured with self-tapping screws:

When everything arrived, a prototype was assembled on the knees, it turned out that the engines even heated up to 70 degrees for 3-5 minutes of work, I had to buy two coolers for them , and the regulators, on the contrary, do not heat up even with the fans off (looking ahead ATV under load, they are also not heated). Since we have two engines from two different sides, it was necessary to solve one more problem - sensory motors spin only in one direction. Originally it was planned to disassemble one motor, and turn the sensor in it 180 degrees ... but the reality showed that it was impossible to make a little blood. Moreover, during experiments with the sensor and the timings, one of the regulators partially burned, as a result, I abandoned the sensor, and connected them as usual BCs. The sensor itself consists of three Hall sensors that track the position of the rotor, and a temperature sensor. It was decided not to leave all this household, but to connect to the MC and use it as an engine temperature sensor, engine speed sensor, and later, knowing the gear ratio — and as a speed sensor.
The pwmservo library was somewhat puzzled, it is designed to control servos (in my case, regulators) through hardware PWM, with an accuracy of 1 degree, only 180 states, and the “forward” direction is only half of the range, i.e. 90 states. It seemed to me that it was not enough, I had to edit the library to the detriment of the cross-platform arduin (it turned out only for controllers with 16 MHz), the result is 1000 states in each direction (one is 0.5 μs PWM duration, PWM duration from 1 to 2 ms).
After the work "on the knee" was more or less debugged, the whole economy was installed on a quad bike:
A photo
Engine + gearbox:

Inside a small creative mess of wires (just threw all the wires inside, I wanted to test faster, later brought into human form):

Engine + gearbox:
Inside a small creative mess of wires (just threw all the wires inside, I wanted to test faster, later brought into human form):
Since the power turned out to be more than 500 watts, it was necessary to limit the rate of gas rise, if from a place you sharply turn the gas to the maximum, the power will increase smoothly and reach its maximum in about 3 seconds. I am sure that without this there would be an effect of instant tipping.
In general, here is a video recording of telemetry from the phone screen, everything is visible there, only because of a slightly decelerated speed sensor in the left engine (left green bar), these speeds are slightly underestimated, the maximum speed achieved on fresh batteries is 18 km / h
The values of the columns: blue - engine temperature in degrees, green - engine speed in rpm, orange - power supplied to engines in arbitrary numbers from 0 to 1000, gray - the position of the gas knob.
And here is how it goes:
I was not dragged away ... I was stalling, but on the quad itself I was driving, and judging by telemetry, he absolutely doesn’t care who it is
On the first video at the start a crunch is heard. On the first evening, the gearboxes were completely out of order. The problem turned out to be that the gearboxes consist of nylon gears rotating on a 9 mm steel axis without bearings, so the friction force of the gears was so great that in the same gear in the gears the middle just melted, and the alignment was lost. In another gear, the gear wheel welded to the axis, and the axis began to rotate in the housing and melt it, with the result that the gear also lost its alignment.
To solve this problem, we needed:
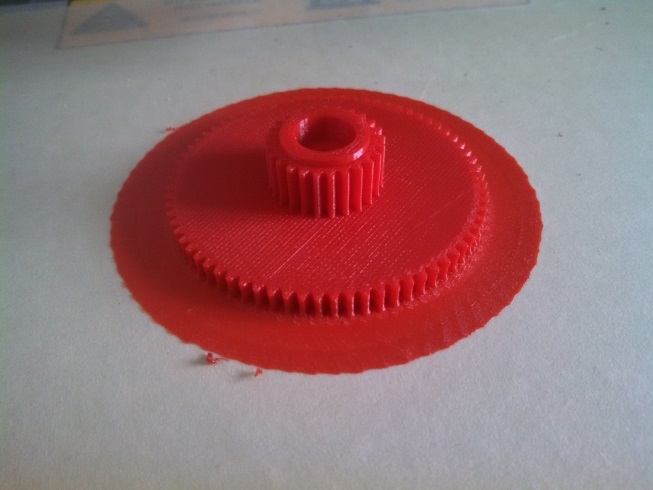
New axes 5mm, the poet had to print on a 3D printer sleeves with an outer diameter of 9 mm (like the old axes), and the internal 5mm, in order to allow new axes to be installed in the old gear case, 11 mm holes 5 mm deep were drilled in gears both sides (bearing seats). The gears are now mounted on bearings, and also richly lubricated with lithologic, and now, for more than six months, everything goes perfectly in all conditions:
A photo



But I don’t stop there, the next step is the custom gears of the gearbox in order to increase the speed to 25-30 km / h.
Children learn very quickly, and already do an excellent job of entering a 90-degree turn with a slight slowdown and then a sharp gas at the exit of the turn.
The sketch, the modified pwmservo library, pinount can be downloaded here , all this in draft form, there are a lot of unfinished and debugging code in the code, for which I apologize in advance.
Source: https://habr.com/ru/post/396209/
All Articles