3 serious autopilot problems that don't seem solvable

Tesla's deadly accident with the Model S is a reason for itself, but, as in the joke about the fight at the wedding, "you have to start someone else." There are many discussions, interpretations of what is happening on the market and the causes of accidents a million.
"But how could he not see the truck!" And that was all. I did not see, did not cope with the situation, yes. And the autopilot will not be able to cope with the fact that protein graduates of driving schools click.
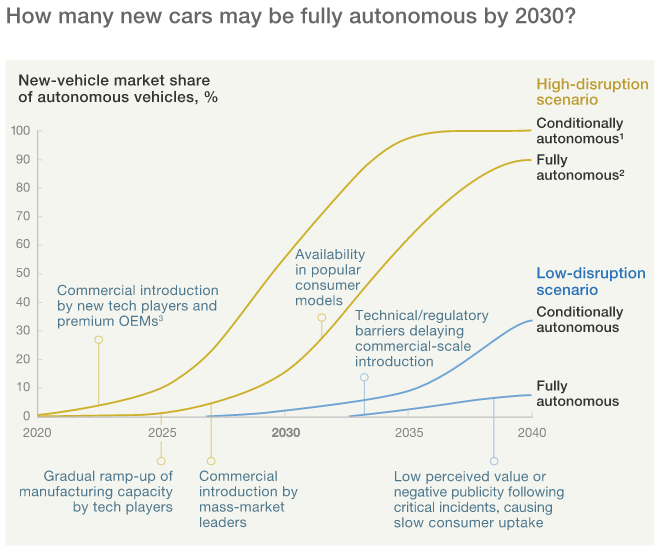
I will try to describe the 3 practical difficulties that autopilots are facing now and that do not look solvable in the coming years. So when McKinsey says that by 2030, at best, 15% of new cars will be self-driving , believe them.
')
And if something goes wrong, then by 2040, no more than 5% of cars can be called autopilot.
Why?
The first problem is the sensors
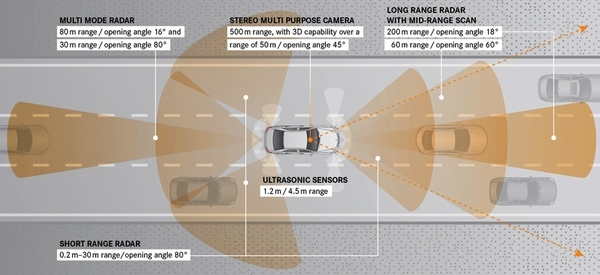
The main brake on the development of autopilots is not algorithms. A disgusting understanding of the machine surrounding space. Information from modern sensors is categorically insufficient and improving the decision-making mechanism (neural networks, and so on) makes little difference. Scanning lidars (black buckets that stand on most prototypes, including Google Car) are prohibitively expensive for production cars and do not provide the information necessary for confident movement.
Simple illustration: AI wins the pilot on the air combat simulator in a situation where the car has full information about what is happening. The computer will pass you in any simulator. On the road, this will not happen.
And computer testing grounds for autonomous transport , which are trained on synthetic information, will not seriously change anything.
What to do?
There is an opinion that with existing sensors (cameras, radars, lidars, etc.) it is impossible to completely solve the problem of self-government. So, to improve the capabilities of modern sensors, to invent new ones for the correct "digitization" of space in dynamics.
Something like a question with batteries. While the capacity of the batteries will not turn up to increase several times, and better by an order, wearable electronics, electric cars and many others are marking time.
The second problem, nonuniversality

Everyone is familiar with the Pareto Law , and so it is also implemented in autopilot. 80% of road situations cars understand, the remaining 20% spoil everything.
This does not mean that autopilots can drive 80% of the world's roads. This means that within any arbitrarily taken trip, 80% of situations will not cause problems, 20% will cause. Dangerous proportion.
Look at what works. These tasks will be the easiest. Autobahn autopilot, parking, check in the garage - not without blots, but it works.
The developers are left with the most unpleasant thing: passing intersections, rebuilding in a lively stream, and a couple more dozen similar scenarios. With some cases it is not very clear what to do. For example, it is difficult for a car to understand in advance whether it will pass between two closely spaced obstacles. And while it is impossible to understand your dynamic corridor (that is, the limits of the space that the car occupies in dynamics), and without this it is impossible to correctly calculate the traffic situation.
Existing autopilots are so not universal that they require each road scenario to be described separately. Read Mobileye's comment on the notorious accident ? The official position is as follows: the collision avoidance system does not understand the arrival of the car from the oncoming lane, it will start in 2018.
What to do?
The client, as a minimum, is not carried out on the demonstrations on the freeways - these are the simplest tasks. As for the players, they still do not understand which way is right. From here, neural networks, manual layout of scenarios (they write that 600 people are involved in Mobileye, and soon there will be more than 1000), virtual polygons and all that.
Problem three, market

Autopilot or another feature is not enough to be functional, you need to become cheap. Car navigation for over twenty years. But with the price of the system in a couple of thousand dollars, it is still put on less than 20% of all new cars. Self-managed functionality is even more expensive.
70 thousand bucks for Velodyne lidar or 30 thousand for several Sick lidars - brute force, this is understandable. If you focus on production cars, advanced driver assistance systems, abbreviated ADAS, (which are not yet autopilots) add to the price of 7-12 thousand dollars. Fine? Nah
A study by the Boston Consulting Group says that only 17% of buyers are ready to spend more than 5,000 dollars on autopilot (I’m noticing). That is, to win at least 15 percent of the market, the autopilot system needs to become roughly speaking an order of magnitude smarter and twice as cheap as it is now. This does not look like a near prospect.
So there will be more and more assistants with autopilot elements (car parking, auto traffic in traffic, traffic on the highway with markings or even convoy modes) in the next couple of years. Automakers reduce the cost and scale of these functions, not a problem. Toyota offers its simplest Safety Sense for only $ 500-1000 , which is not much.
And in difficult situations (the same 20 percent of the trip) management for many years will remain on the person. Why? See point 1 - the machine cannot adequately assess what is happening and will not learn in the near future.
So what to do?
To get used to the abbreviation ADAS , which in the next five years will become as familiar as steel ABS and ESP. After 2020 it is worth waiting for active state regulation in this area, active assistance systems will become mandatory in Europe and the USA.
And to understand that there is no full-fledged autopilot on the market yet, and in general they have (so far) unrecoverable problems.
Further more about the first problem, sensors .
Source: https://habr.com/ru/post/396055/
All Articles