“The origin of the project. Part 1.1. How I collected a telepresence robot on a wheelbase. ”Endurance Technologies
Project: Endurance Robots & Lasers Technologies.
Article number 1. “The origin of the project. Part 1.1. How I collected a telepresence robot on a wheelbase. ”
By 2015, members of our future team managed to earn enough money to risk their time in the long term (determined the planning horizon for 1 year). And we decided to organize a startup. Engage in buying and selling? Nooooo, tech startup! Namely, the development of robots and solid-state lasers with a power of about 1-10 watts.
The idea of being present at the right time in an interesting place for thousands of kilometers I immediately liked and still enjoy! We all love live webcasts. And thanks to the robot, I also control the direction of my gaze, my location. So in 2015, when we started the Endurance Robots project, I started developing a telepresence robot on wheels. The wheelbase will allow you to move around the room or on the street, and the telepresence will ensure the relevance of what is happening around the situation. The ultimate goal: complete virtual reality, a robot controlled by a man with the help of Oculus rift points! The fire!))
')
For a start, I googled and studied the internationally available offers: PadBot (China), BotEyes (Russia), Double Robotics (USA), Webot (Russia), OrigiBot (USA), Oculus (Canada), Anybot (USA), RBOT Synergy (Russia), and compiled a table of comparative characteristics of robots. Robots differed in their functionality: the ability to take objects with a manipulator (a can of beer from the fridge :), to overcome high obstacles, autonomously charge, etc. Naturally, the price tag floated and ranged from $ 1,000 to $ 10,000. Subsequently, I realized that low-cost devices up to $ 5000 are robotic platforms, controlled by a human operator, but not autonomous robots that can make decisions independently in a changing environment: approaching an obstacle, driving from point A to point B, recognizing voice commands. Our team Endurance Robots decided to enter the market of economy class platforms up to $ 2000. Based on the table of comparative characteristics, I determined the characteristics of the device, which need to be achieved first of all, namely: battery life (from 8 hours, a whole working day), overcoming obstacles (up to 3.5 centimeters, entrance door threshold), reliable transmission control commands via the Internet, high-quality video and audio communication. One project participant insisted on making the body of a robot out of a female dummy and installing a tablet between the breasts. We even bought a used torso without arms, legs and head for $ 2 (a full-fledged new dummy costs ~ $ 100), but due to the limited budget, this idea eventually died.

During the testing of demand, it became clear that people are looking for not just a tablet on wheels, but rather a robotic platform that is able to perform human intellectual tasks: recognize objects and speech (open source technology OpenCV), competently answer questions (AI), overcome the route to the subject, grab the object and transfer to the destination. That is, the wheelbase is not the main thing, but the necessary addition to what we offer. Strategically, the wheelbase remains the main form factor. By analogy laptop -> tablet. Those. A new form is a new product.

The task at the first stage is to develop a wheelbase: inexpensive (no more than $ 200 for small-scale production), efficient (which would move reliably, have modularity and the ability to quickly repair), simple (like what the phone put, the application downloaded and the system works ), reliable (software, hardware), which can be further improved. The operator must be able to send signals to electric motors and servos via the Internet.
So, the BASIC PRINCIPLES of the design.
- The universality of the platform a la "all-terrain vehicle" is not pursued. Environmental model = indoor. The surface is flat, (laminate, tile, wood, concrete, linoleum), obstacles up to 1 cm.
- Priority in the following sequence: attractiveness, ergonomics and simplicity, mobility.
- Creation of a prototype modeled for industrial production.
- Reliability in daily use (1 year)
- Interchangeability or complementarity (put the second speaker or the second camera is where).
- Versatility fasteners.
- Rectilinear movement, not zigzags.
- Noise and vibration less than 10 dtsb.
- Disassembly and ease of construction for transfer from one building to another.

TECHNICAL SPECIFICATIONS designs.
- Maximum speed up to 3 km / h.
- The height of the upper edge of the screen is ~ 1.5 m. (Preferably, with the possibility of changing from 1.2 m to 1.8 m).
- How many kg at a height of 180 cm? Tablet + cradle + two servos. Will the three-wheeled construction be stable with the selected batteries along the sides when driving over an obstacle of 3.5 cm with one wheel or two wheels?
And then a million questions fell ... What is the size of the wheel? What material?

What type: Omni, smooth, with a deep tread?
How many wheels: three or four? How to fit on the shaft?

On the shaft gear or motor?

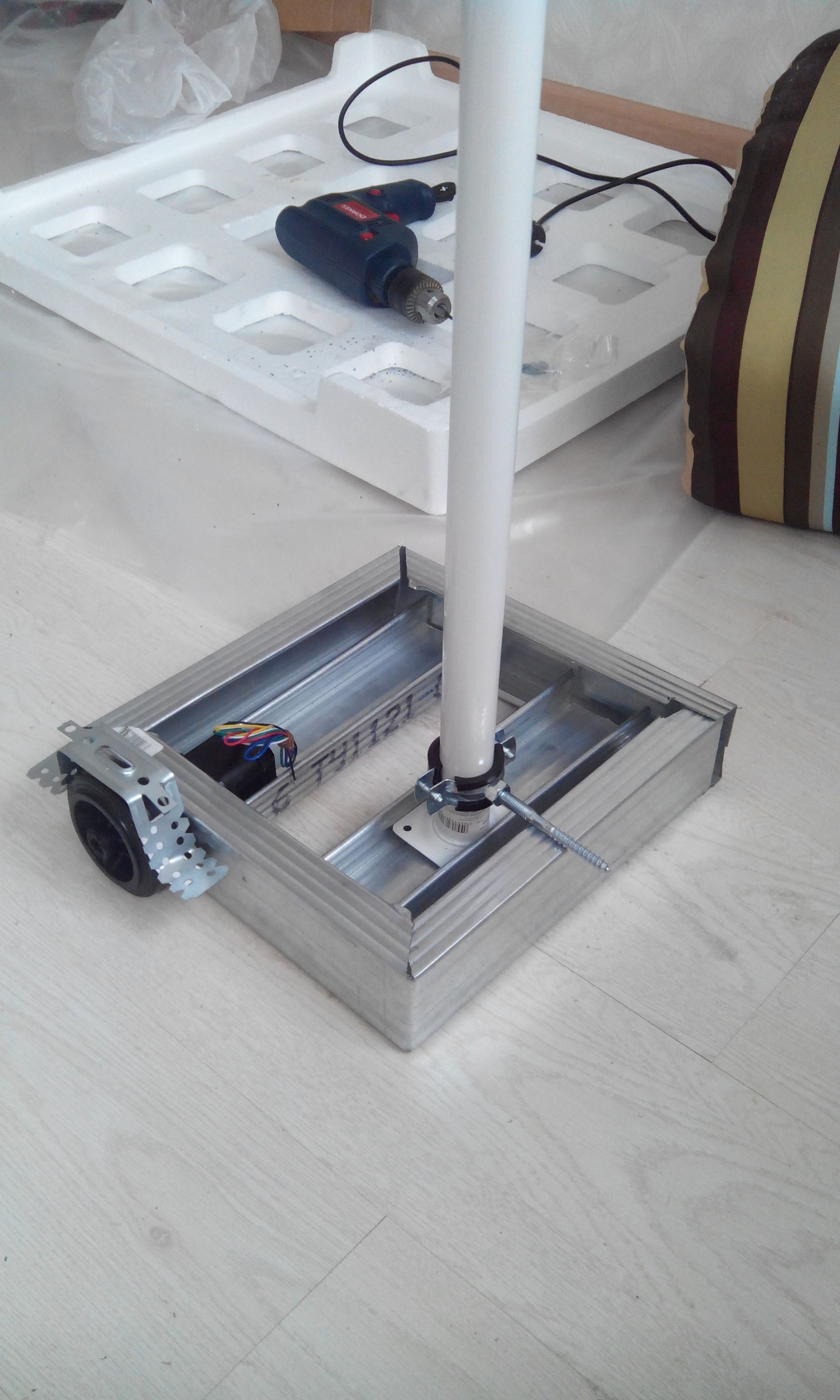
Which motor to choose: collector, brushless, stepping? What material to make a frame? As a result, I made the first prototype of readily available materials sold in any hardware store: 3 wheels (two leading and one swivel), a frame made of a thin aluminum U-shaped profile, screws and bolts, 2 stepper motors.

The main thing is that this prototype fulfilled its mission: to serve our circuitry to Andrew for testing electronics up and down.
In this article, I described the very beginning of our long journey. Products and photographs of amateur. But in the following parts I will show a more professional approach:
The layout of the elements of mechanics and electronics, which we focused on:
Continuation of the article here: “Continuation. Part 1.2. How I assembled a telepresence robot on a wheelbase. "Endurance Robots & Lasers Technologies
Article number 1. “The origin of the project. Part 1.1. How I collected a telepresence robot on a wheelbase. ”
By 2015, members of our future team managed to earn enough money to risk their time in the long term (determined the planning horizon for 1 year). And we decided to organize a startup. Engage in buying and selling? Nooooo, tech startup! Namely, the development of robots and solid-state lasers with a power of about 1-10 watts.
The idea of being present at the right time in an interesting place for thousands of kilometers I immediately liked and still enjoy! We all love live webcasts. And thanks to the robot, I also control the direction of my gaze, my location. So in 2015, when we started the Endurance Robots project, I started developing a telepresence robot on wheels. The wheelbase will allow you to move around the room or on the street, and the telepresence will ensure the relevance of what is happening around the situation. The ultimate goal: complete virtual reality, a robot controlled by a man with the help of Oculus rift points! The fire!))
')
For a start, I googled and studied the internationally available offers: PadBot (China), BotEyes (Russia), Double Robotics (USA), Webot (Russia), OrigiBot (USA), Oculus (Canada), Anybot (USA), RBOT Synergy (Russia), and compiled a table of comparative characteristics of robots. Robots differed in their functionality: the ability to take objects with a manipulator (a can of beer from the fridge :), to overcome high obstacles, autonomously charge, etc. Naturally, the price tag floated and ranged from $ 1,000 to $ 10,000. Subsequently, I realized that low-cost devices up to $ 5000 are robotic platforms, controlled by a human operator, but not autonomous robots that can make decisions independently in a changing environment: approaching an obstacle, driving from point A to point B, recognizing voice commands. Our team Endurance Robots decided to enter the market of economy class platforms up to $ 2000. Based on the table of comparative characteristics, I determined the characteristics of the device, which need to be achieved first of all, namely: battery life (from 8 hours, a whole working day), overcoming obstacles (up to 3.5 centimeters, entrance door threshold), reliable transmission control commands via the Internet, high-quality video and audio communication. One project participant insisted on making the body of a robot out of a female dummy and installing a tablet between the breasts. We even bought a used torso without arms, legs and head for $ 2 (a full-fledged new dummy costs ~ $ 100), but due to the limited budget, this idea eventually died.
During the testing of demand, it became clear that people are looking for not just a tablet on wheels, but rather a robotic platform that is able to perform human intellectual tasks: recognize objects and speech (open source technology OpenCV), competently answer questions (AI), overcome the route to the subject, grab the object and transfer to the destination. That is, the wheelbase is not the main thing, but the necessary addition to what we offer. Strategically, the wheelbase remains the main form factor. By analogy laptop -> tablet. Those. A new form is a new product.
The task at the first stage is to develop a wheelbase: inexpensive (no more than $ 200 for small-scale production), efficient (which would move reliably, have modularity and the ability to quickly repair), simple (like what the phone put, the application downloaded and the system works ), reliable (software, hardware), which can be further improved. The operator must be able to send signals to electric motors and servos via the Internet.
So, the BASIC PRINCIPLES of the design.
- The universality of the platform a la "all-terrain vehicle" is not pursued. Environmental model = indoor. The surface is flat, (laminate, tile, wood, concrete, linoleum), obstacles up to 1 cm.
- Priority in the following sequence: attractiveness, ergonomics and simplicity, mobility.
- Creation of a prototype modeled for industrial production.
- Reliability in daily use (1 year)
- Interchangeability or complementarity (put the second speaker or the second camera is where).
- Versatility fasteners.
- Rectilinear movement, not zigzags.
- Noise and vibration less than 10 dtsb.
- Disassembly and ease of construction for transfer from one building to another.
TECHNICAL SPECIFICATIONS designs.
- Maximum speed up to 3 km / h.
- The height of the upper edge of the screen is ~ 1.5 m. (Preferably, with the possibility of changing from 1.2 m to 1.8 m).
- How many kg at a height of 180 cm? Tablet + cradle + two servos. Will the three-wheeled construction be stable with the selected batteries along the sides when driving over an obstacle of 3.5 cm with one wheel or two wheels?
And then a million questions fell ... What is the size of the wheel? What material?
What type: Omni, smooth, with a deep tread?
How many wheels: three or four? How to fit on the shaft?
On the shaft gear or motor?
Which motor to choose: collector, brushless, stepping? What material to make a frame? As a result, I made the first prototype of readily available materials sold in any hardware store: 3 wheels (two leading and one swivel), a frame made of a thin aluminum U-shaped profile, screws and bolts, 2 stepper motors.
The main thing is that this prototype fulfilled its mission: to serve our circuitry to Andrew for testing electronics up and down.
In this article, I described the very beginning of our long journey. Products and photographs of amateur. But in the following parts I will show a more professional approach:
The layout of the elements of mechanics and electronics, which we focused on:
Continuation of the article here: “Continuation. Part 1.2. How I assembled a telepresence robot on a wheelbase. "Endurance Robots & Lasers Technologies
Source: https://habr.com/ru/post/395507/
All Articles