Pilotless tractor tested on the fields of Russia
The Russian company Cognitive Technologies conducted the first tests of unmanned tractors with a computer vision system of its own design in Tatarstan. In the future, the hardware-software complex is planned to be installed not only on tractors, but also on other agricultural equipment — combines, seeders, and so on, Izvestia writes .
Thanks to unmanned vehicles and computer vision systems, Russian farms will be able to significantly increase their profitability, because now expensive equipment is used inefficiently. For example, a combine works on average six hours a day, and idle the rest of the time. Unmanned tractors and harvesters will work in the fields day and night, 24 hours a day. They will not be disturbed by the conditions of poor visibility, they will not be confused by rain or fog, and even in pitch darkness, an unmanned tractor can mow grass or collect potatoes as effectively as it does during the day.
Unmanned agricultural equipment in Russia will be promoted by a new agroholding, which Cognitive Technologies is creating with agricultural machinery manufacturer Rostselmash and agroholding Soyuz-Agro based on the Innopolis special economic zone.
')
In total darkness for unmanned systems, night vision cameras can be used, but it is more effective to use lidars in conjunction with a previously marked map of the territory, which is recorded in the tractor's navigation computer. American colleagues recently conducted tests of an unmanned vehicle vehicle system in complete darkness - and determined that a navigator lidar is much safer to drive a car in the dark than a human driver.
During the test, unmanned Ford at the site in Arizona was made 3D-map of the area, and in the dark lidar using laser pulses (2.8 million pulses per second) paved the way, as if probing the road with the orientation of the 3D-map.
The Russian tractor is not yet planned to be equipped with a lidar, because this will significantly increase its value. At the moment, according to the developers, the cost of the hardware-software complex of unmanned vision is no more than 15% of the cost of the tractor. For Russian collective farms and farms, this is an acceptable markup. If you put a full-fledged lidar on a tractor, then the cost of equipment will increase significantly.
They will install computer vision software and hardware complexes on Russian tractors, including a stereo pair - a system of two video cameras that shoot video in Full HD resolution, that is, 1920x1080 pixels.
In addition to video cameras, the GLONASS and GPS navigation and inertial sensors and a computing unit (computer) are included in the package of the Russian unmanned tractor.
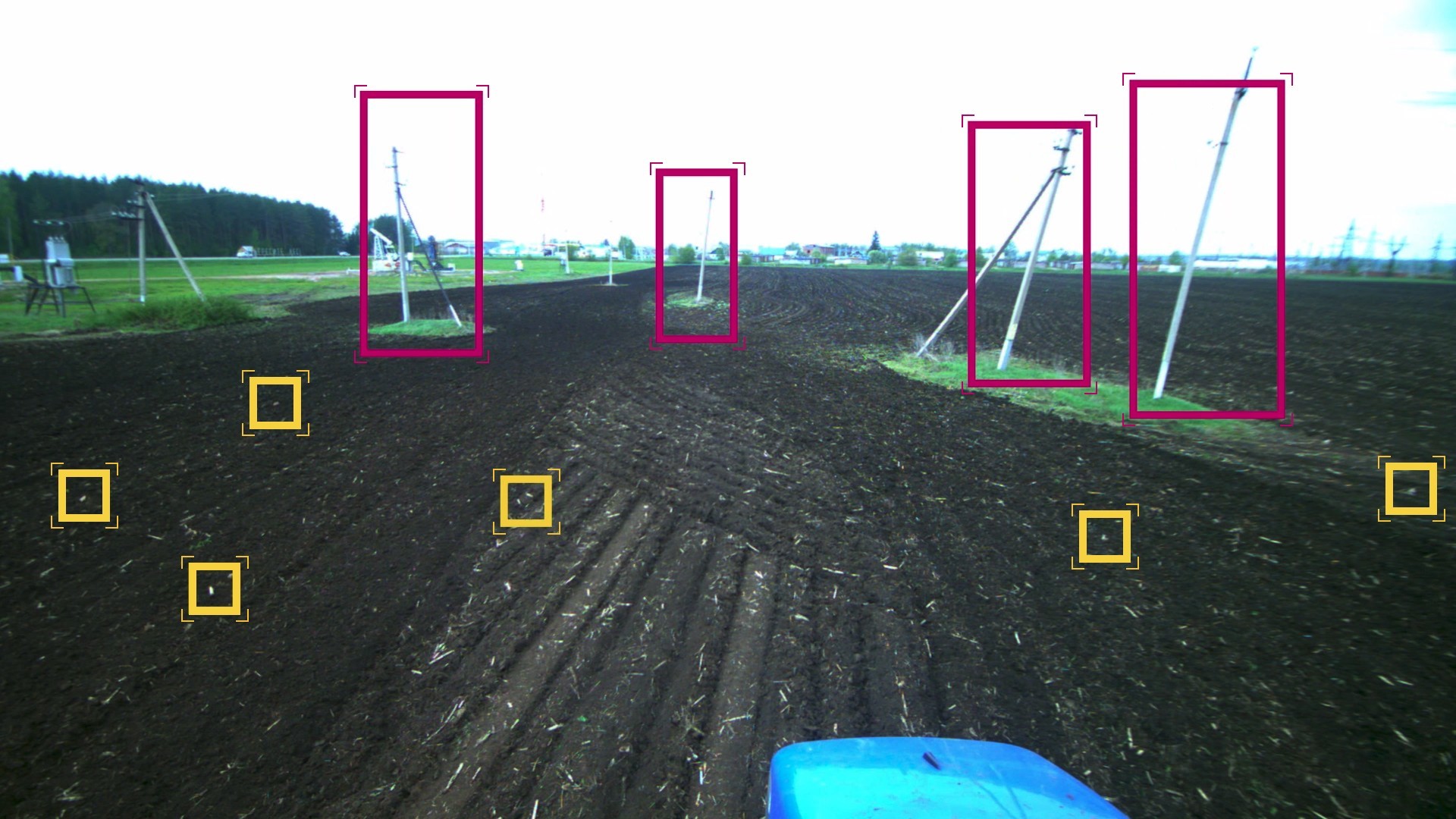
“The computer vision system allows you to accurately detect dangerous objects, determine their sizes and coordinates to compile high-precision maps,” said Olga Uskova, President of Cognitive Technologies. “Thanks to an accurate knowledge of the position of items on the field, many of them can be removed even before harvesting, when they can pose a real threat to the mechanical elements of agricultural machinery.”
The compilation of a digital map of the field and the application of surrounding objects (pillars, stones and other artifacts) to it are carried out during pre-sowing operations, such as fertilizing and harrowing. The operation takes place in spring, when the acreage is not sown, so that all artifacts are well recorded by the computer vision system. On these digital maps, the tractor will be oriented in summer and autumn, during harvest. He will try to go around objects that could not be removed from the field in the spring.
The developers are confident that vehicle sensors and a computer vision system can even detect obstacles that are not on the map. It is stated that the system recognizes objects ranging in size from 10–15 cm at a distance of up to 15–20 m. Everything else is not dangerous if a stone trap is installed on the tractor.

Tests of a tractor with a computer vision system Cognitive Technologies
Tests of an unmanned tractor will last about a year and a half. According to Olga Uskova, this time is enough to bring the computer vision system to the stage of industrial use and put it into commercial operation. Software and hardware systems will be sold to farms of Russia, as well as countries of near and far abroad.
Experimental developments in this area are not only in Russia. For example, recently the Minister of Agriculture of Japan raised the topic of switching to robotic technology in agriculture in connection with the aging of the population, including farmers.
The average age of Japanese farmers is 67 years old, two thirds of them are over 65 years old. In Russia, the problem of aging is not yet due to low life expectancy, but over time it may appear.
Unmanned tractors are ready to release the Japanese corporation Kubota.

Kubota autonomous tractor prototype with lidar
Small unmanned tractors do in Belarus . Surely, the Russian computer vision system can also be installed on popular Belarusian tractors manufactured by the Minsk Tractor Plant.
In the imagination of Russian developers, in the future, agriculture in Russia is as follows: “The work of all intelligent agricultural equipment will be controlled by the minimum number of people from the control center, from which control will be exercised over the operation of all machines. If necessary, he will be able to set the program and the operating time of the tractors, and he will not have to be constantly at the console, ”says Olga Usova.
In general, approximately as predicted by the writer Nikolai Nosov in the science fiction work “Dunno in the Sunny City”.
Independent experts believe that a fully automated future in agriculture will not work out yet. Behind the wheel of a vehicle must be a person who controls the work of automation and is ready to take control in the event of an emergency.
By the way, the company Cognitive Technologies described in more detail its development in the field of machine vision in a corporate blog on Habrahabr . As part of a joint project at the Department of Cognitive Technologies at MIPT, in 2014, a robot car was developed that “processes the video stream in real time, recognizes the surrounding scene, detects objects, and generates a control action aimed at solving the problem”. The robot was tasked with chasing the red ball and pushing it with a bumper.
The video was shot during a report at the autumn conference of young scientists at MIPT, right in the corridor of the main building.
Source: https://habr.com/ru/post/395169/
All Articles