Thinking out loud. And I go walking on ... Or why do we need walking robots
Terrestrial mobile robots traditionally use tracked and wheeled movement systems, the use of such systems is dictated by ease of implementation and continuity from ground vehicles. At the same time, there are many specialized systems of movement, among which the walking systems and mobile robots based on them are of particular interest to scientists and science fiction writers.
Mechanical legs (pedipulyatori), provide the movement of a mobile robot and provide the possibility of stepping over obstacles, respectively, the use of a walking robot is advisable when the obstacles are insurmountable for a tracked and wheeled robot, these can be objects higher than the height of the robot chassis or marshlands, and the use of large chassis dimensions are not acceptable due to the use of the robot on rough terrain or in urban environments, as well as the high power consumption of the chassis.
')
How many legs does a robot need? The number of legs affects the stability of the robot, respectively, the use of robots with the number of legs of more than one pair (multi-legged walking or multi-legged locomotion) is advisable in difficult terrain. Using one pair of legs (bipedal walking or bipedality, bipedal locomotion) is advisable for movement in the interior of a room and urban area, since such an environment is adapted for a person with a straight leg on two legs.
What is the use of walking robots? If we turn, for example, to science fiction films, then, more often, walking robots are depicted as combat vehicles and there may be a mistaken view that such a technique is a panacea on the battlefield, but this is not so.
In the Star Wars kin-universe, or, for example, in the Avatar science fiction film, these machines are used in combat on open and rough terrain, which completely unmasks them because of the high profile, and makes it an easy target for artillery and other heavy armament. In contrast to the previous example, the first part of the movie “Robokop” and the movie “Robot named Chappi” show walking robots operating in an urban environment, but the design of their pedipulators does not allow them to step over large obstacles (to effectively step over the design of pedipulators must be similar to the structure of human legs), as well as maneuverable movement in the city setting, which makes them an easy target, despite the presence of heavy armor. The situation is completely similar with the use of tanks in the city.

Figure 1 - AT-AT Walker from the “Star Wars” movie

Figure 2 - AMP exoskeleton from the k / f “Avatar”

Figure 3 - Robot ED-209 from the k / f "Robocop"
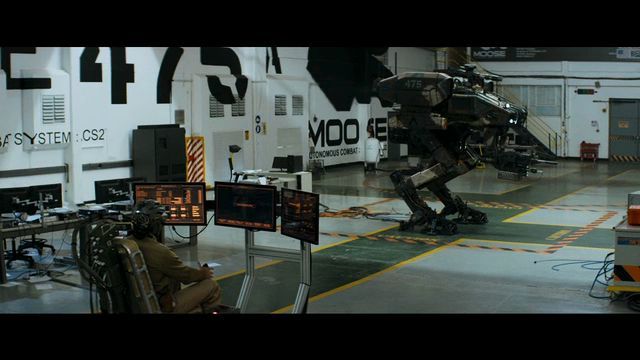
Figure 4 - The MOOSE robot from the “Robot named Chappi”
Consider where it is advisable to use walking robots.
Robots with bipedal locomotion:
Robots with multilegged locomotion:
Conclusion Currently, walking systems are used only in experimental samples of robotics and research platforms, and have not been widely used, because The issues of balancing and efficient energy supply of pedipulator drives are not solved. But certainty in the use of such mobile robots is needed now to develop concepts of practical significant samples.
Mechanical legs (pedipulyatori), provide the movement of a mobile robot and provide the possibility of stepping over obstacles, respectively, the use of a walking robot is advisable when the obstacles are insurmountable for a tracked and wheeled robot, these can be objects higher than the height of the robot chassis or marshlands, and the use of large chassis dimensions are not acceptable due to the use of the robot on rough terrain or in urban environments, as well as the high power consumption of the chassis.
')
How many legs does a robot need? The number of legs affects the stability of the robot, respectively, the use of robots with the number of legs of more than one pair (multi-legged walking or multi-legged locomotion) is advisable in difficult terrain. Using one pair of legs (bipedal walking or bipedality, bipedal locomotion) is advisable for movement in the interior of a room and urban area, since such an environment is adapted for a person with a straight leg on two legs.
What is the use of walking robots? If we turn, for example, to science fiction films, then, more often, walking robots are depicted as combat vehicles and there may be a mistaken view that such a technique is a panacea on the battlefield, but this is not so.
In the Star Wars kin-universe, or, for example, in the Avatar science fiction film, these machines are used in combat on open and rough terrain, which completely unmasks them because of the high profile, and makes it an easy target for artillery and other heavy armament. In contrast to the previous example, the first part of the movie “Robokop” and the movie “Robot named Chappi” show walking robots operating in an urban environment, but the design of their pedipulators does not allow them to step over large obstacles (to effectively step over the design of pedipulators must be similar to the structure of human legs), as well as maneuverable movement in the city setting, which makes them an easy target, despite the presence of heavy armor. The situation is completely similar with the use of tanks in the city.
Figure 1 - AT-AT Walker from the “Star Wars” movie
Figure 2 - AMP exoskeleton from the k / f “Avatar”
Figure 3 - Robot ED-209 from the k / f "Robocop"
Figure 4 - The MOOSE robot from the “Robot named Chappi”
Consider where it is advisable to use walking robots.
Robots with bipedal locomotion:
- in the form of androids, in the field of social services, in consumer robotics;
- in the form of a platform with the target equipment and manipulators, in emergency situations, for example, when parsing debris, in construction, in the maintenance of technical objects (machinery, units);
- in the form of an armored platform with a weapon system and manipulators for fire support of ground operations in an urban setting, the destruction of engineering barriers, barricades, while the approximate height of the robot should not exceed two average human height, i.e. 350 cm (this value was obtained intuitively on the basis of SNiP 2.09.04-87, which states that residential buildings should have a ceiling height of at least 250 cm, and administrative at least 300 cm, of course, this conclusion does not pretend to be unambiguous) shelters in urban terrain (ie, at least one-story building) and of sufficient size to accommodate the payload.
Robots with multilegged locomotion:
- in the form of a platform with a cargo compartment, for expeditions across rugged, marshy and mountainous terrain, while the design of a platform with a variety of joints on the principle of the caterpillar body structure is desirable for better bending of obstacles.
Conclusion Currently, walking systems are used only in experimental samples of robotics and research platforms, and have not been widely used, because The issues of balancing and efficient energy supply of pedipulator drives are not solved. But certainty in the use of such mobile robots is needed now to develop concepts of practical significant samples.
Source: https://habr.com/ru/post/390895/
All Articles