Open source designer of Multiplo robots
Since we started teaching robotics to schoolchildren (and this happened more than two years ago), we mainly work on our own developments. The main reason for this is the closeness of all popular designers. Any Lego, Fishertecnnic, Tetrix is very difficult to combine with something, the more difficult it is to modify them, manufacturers in every way prevent it, because there is very little room for creativity.
The creators of Multiplo adhere to exactly the same ideology as we: maximum openness and compliance with common standards, compatibility with everything in the world.
The main developer of Multiplo is an Argentine office called RobotGroup. They are, in general, the same techies as we are; they are engaged in the training of schoolchildren and at the same time trade in their own developments. Production organized in China. (By the way, in the course of working with them, I deeply imbued with what globalization means - this is when the Russians discuss with the Argentines the peculiarities of monetary settlements in Hong Kong.)
I would divide the Multiplo platform into the following components: mechanical designer, electronic peripherals, control module and software.
')
Mechanics

The most interesting part. Consists of the following elements:
- The main parts, cut on a laser machine from a three-millimeter plastic.
- Hardware: screws and nuts M3 + various washers to them, plastic rivets.
- Aluminum corners.
- Tires on wheels.
The main parts can be cut by yourself on a laser or a milling machine, hardware - to buy in the nearest store of construction fasteners. Tires we are going to pour from silicone. Aluminum corners, apparently, only from China.
The wheels here are also assembled from plates:

Head screws are inserted between the plates under the internal hexagon, which clamp the motor axis:

Plastic rivets deserve special attention:

Actually this is the main element of fasteners in the designer. On rivets, everything is assembled several times faster than on screws. Their disadvantage is that they are formally disposable, in fact, the number of uses is limited; apparently, therefore, they are not used in other constructors.
From the experience of assembling the feeling is very good, the scope for creativity is much more than with Lego.
Peripheral electronics
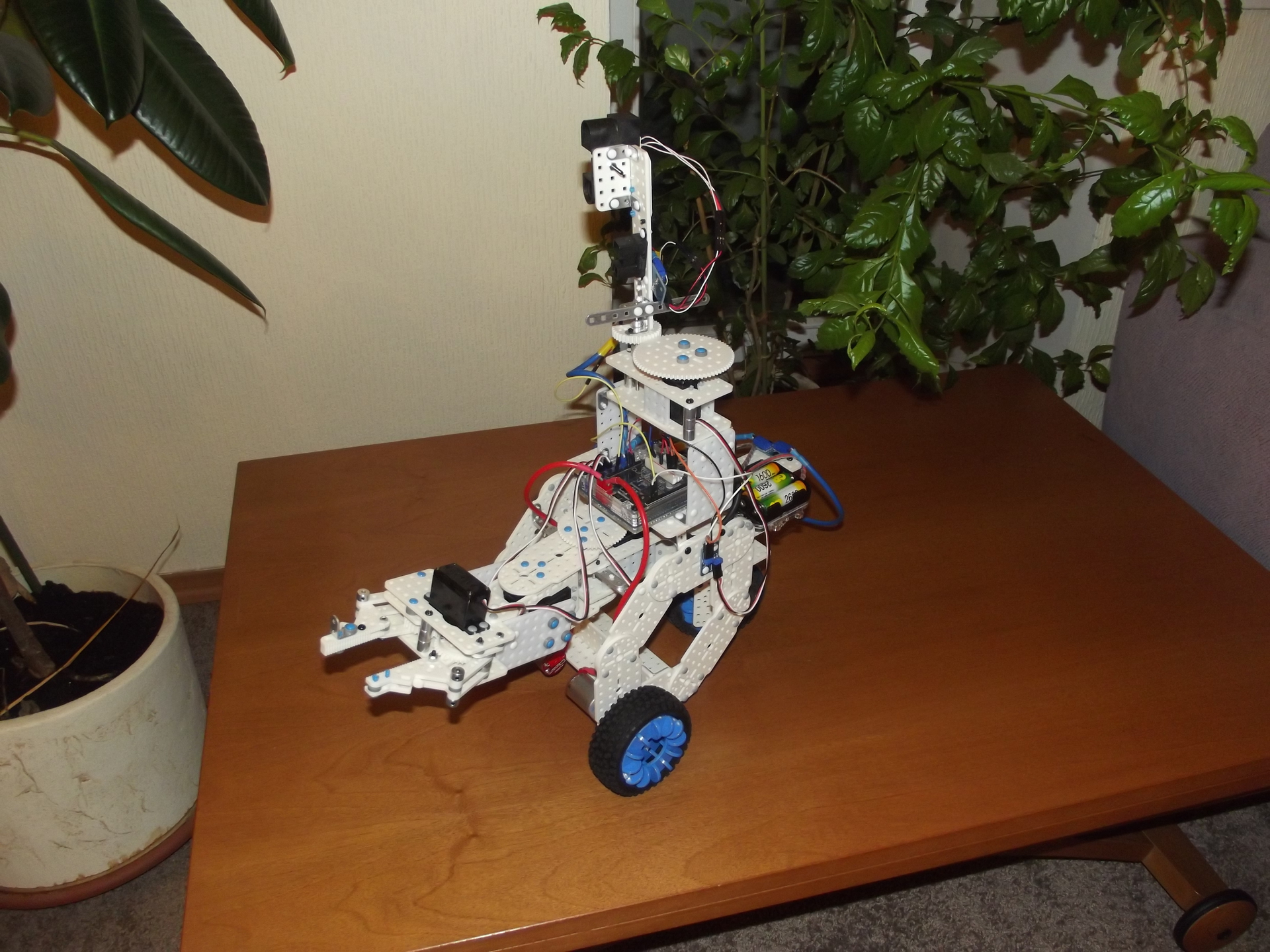
Everything is standard: such sensors, motors, servos can be bought at any specialty store. The peculiarity is that the motors are very powerful: the design from the title photo moves on a flat surface at a speed of about a meter per second.Control module

Own Argentinian development on the basis of the atmega 328. What is:
- Standard Arduin connectors.
- Driver for two 12V engine.
- Additional wiring ports for three-pin peripherals.
- Zoomer.
- Buttons Run, Reset and Power.
- Any other exits with which I did not understand.
The highlight is this: the board communicates with the computer not via the serial port, as usual, but through the HID interface. On the one hand, this is convenient, because there are no problems with finding the port, on the other hand, after downloading the code, it is not possible to communicate normally with the board (this can be done only with the help of special software, which also has problems). In the latest versions of this board, it is possible to work on the serial port (there is a corresponding jumper on the board).
And everything is good, the only trouble is that the board is very unreliable: about a third of those that we actively use have already flown. To replace them, Argentines are asked to first send the broken back; postal trade between Shanghai and Yekaterinburg - you understand that.
Soft
The Argentines made their own build of the arduino IDE, added a module for working with the HID interface and a library for working with engine drivers and others.
The second thing is much more interesting - this is a minibloq graphical programming environment:

In graphic environments, I am not a great specialist, but this is what I like most of all - you can immediately see the generated code, it is possible to edit it, it is easy to switch from this medium to ordinary coding.
Order and cost
We ordered a large enough lot for our competition. After a long discussion and combing, the turnips did this as follows: they sent a list of what we needed to the Argentines by mail, they told us the amount, we collected an arbitrary amount of money in their online store and paid for it. Delivery organized through the company, which usually brings us any nishtyaki taobao.
By cost, if you compare, for example, with Lego, you get the following: for the same price, you get about the same electronics (though not always working) and several times more mechanics.
Summary
The mechanics are great, cut it yourself, order from China - what you like best.Developing your own control module, organizing its production - it seems to me that it was a mistake on the part of the creators, it was much easier and safer to take a standard arduin with some shield. Among other things, it also gives a modularity effect: it stopped arranging the current shield - set another one.
A further direction of our work is to develop the multi-mechanics and install standard control modules on it.
References:
multiplo.org is the main site of the project.
multiplo.org/wp-content/uploads/2013/07/N8.BuildingKit.v1.0.PartsList.png - the composition of the set.
www.youtube.com/watch?v=TRj5SiNW1y4 - walking robot.
youtu.be/LbMC282NXvo is my craft.
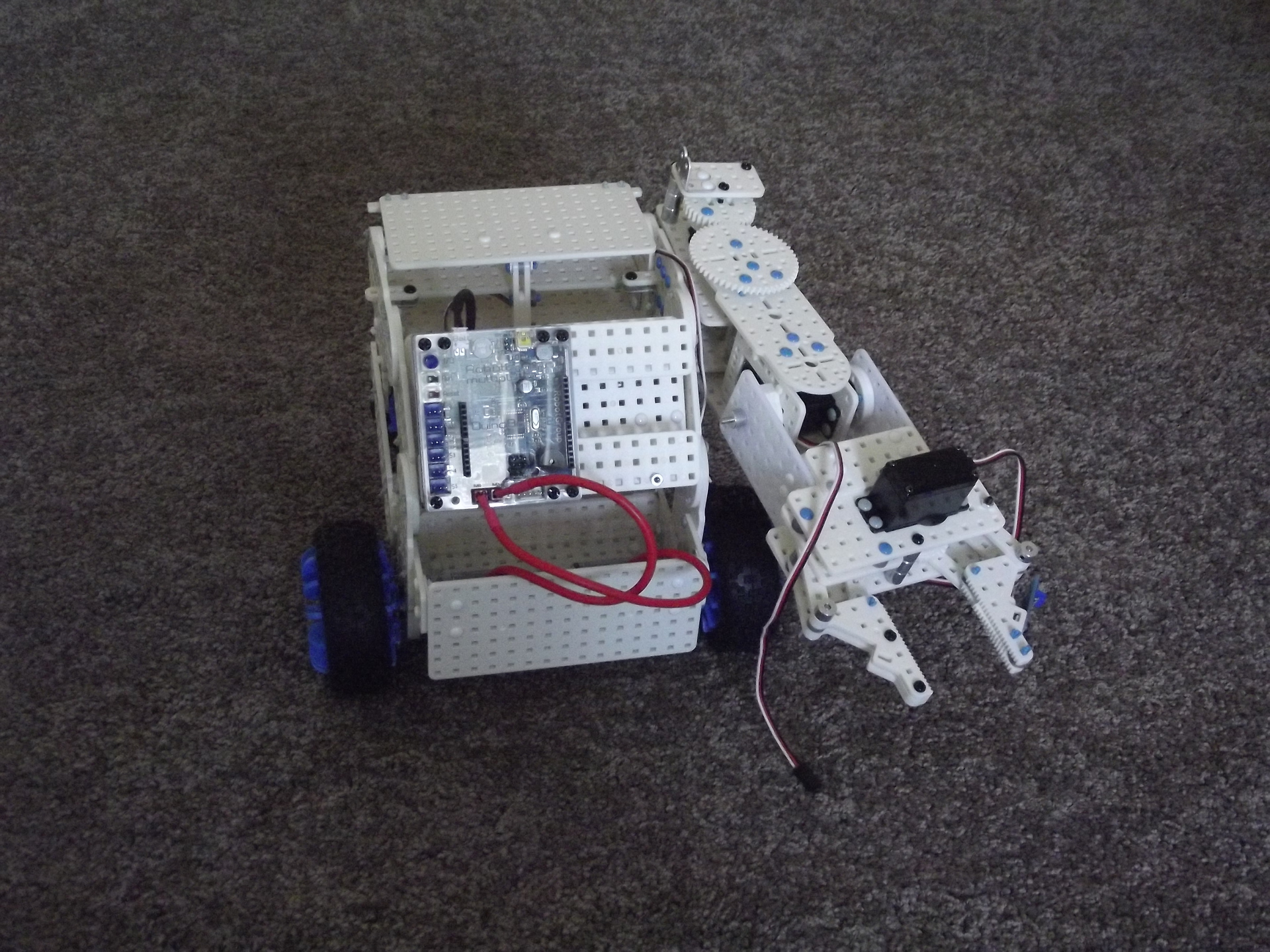
More photos:
Claw:



Some advertising for Ekaterinburg
We have several sets without control modules (modules are broken, they are on their way to China). Come in, give up at cost.
Source: https://habr.com/ru/post/375113/
All Articles