History of engineering designers fischertechnik
Sometimes in the world around us strange things happen. For example, in the wake of the madness of mass consumption of goods and digital content, in an endless kaleidoscope of one-day things that pour out from the screens of monitors and TV, really amazing commercial products with their own philosophy and long history are imperceptibly lost.

Today I want to share material about the project, which for 52 years has been promoting the formation of engineering personnel in various countries, including the USSR and the Russian Federation. It's about the designers of fischertechnik (Fishertechnik).
1965
The history of fischertechnik designers began 52 years ago, when a talented German entrepreneur and inventor Arthur Fisher (1919-2016) decided to use the original marketing technique to give his customers something unusual for Christmas that was different from the usual set: chocolate, branded pens and promotional paper.
It must be said that by that time his main business - the production of plastic construction fasteners - was already firmly on his feet and had everything necessary for a quick start in the production of new plastic parts (the history of Mr. Fisher’s life itself is very exciting and requires a separate post. ).
In general, it is not known for certain what pushed him to the final idea, but as a result, the original plastic building block was born, to which other parts could be attached from all sides.
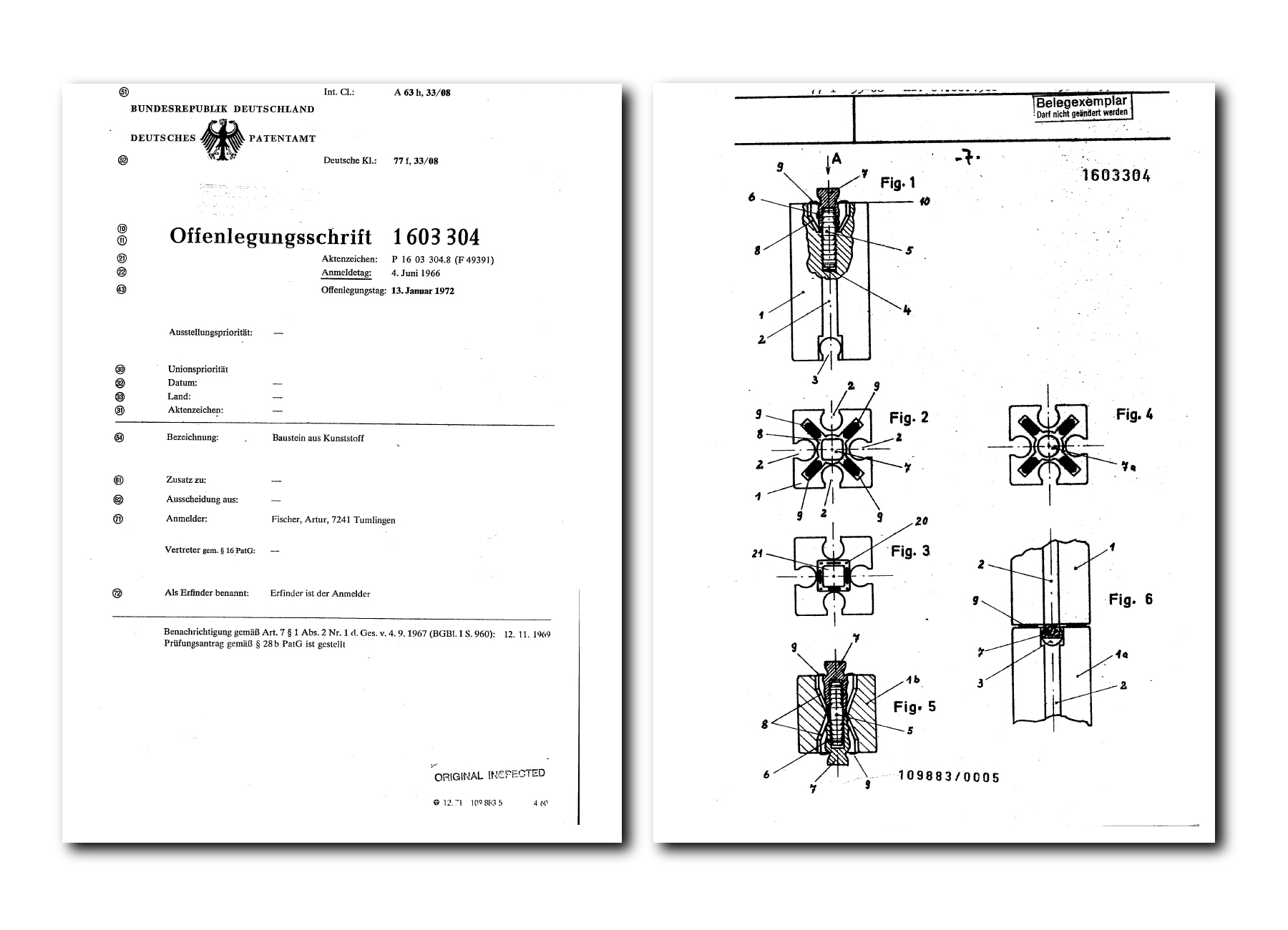
Parts were made of polyamide and contained a structural element reinforcing steel element. Illustration explaining how parts are connected to each other:

The picture below is a copy of patent P 1603304, which describes the design of this unit. The application, by the way, was filed on June 4, 1966, and the invention was registered on January 13, 1972. Link to the DPMA page .
The customer response was so good that Arthur decided to launch the kits into commercial production - the first set for designing fischertechnik was born. It can be said that here he groped for a gold mine - the talent of the inventor and the businessman's instinct allowed him to market a successful product - the designer of fischertechnik quickly took his place on the shelves of shops and was warmly received by the educational community.
1966
The first results of the commercialization of the invention appeared in the spring of 1966 - three basic sets of fischertechnik — 100, 200, and 400 — and five sets with upgrade details — 10, 15, 20, 25, and 30 — went on sale.
The picture shows the design set FT200:

Upgrade kits could by the following formulas:
FT200 = FT100 + FT10 + FT15 + FT20
FT400 = FT200 + FT10 + FT15 + FT25 + FT30
In the picture, the FT30 upgrade kit:

These were simple kits for designing machines and mechanisms with manual transmission. However, at that time, fischertechnik was distinguished by an engineering bias - all designs were somehow connected with real technology, they lacked any decorative elements without a functional sense. The designer of fischertechnik maintains this philosophy even now.
On the picture below is a scan of the page from the instructions for dialing FT 100:

1967
At the very beginning of 1967, the mot.1 and mot.2 expansion kits appeared on the market with DC motors, gearboxes and gearing elements. With the help of these sets it was possible to extend the functionality of existing designers and “revive” the assembled structures with the help of an electric drive.
In the picture set FT mot.1:

Also this year, six additional kits appeared with different details to expand the capabilities of the designers:

1968
A year later, in the fischertechnik lineup, the first e-m1 electromechanical set appeared - the “Elektro-Mechanik”, which included lamps, buttons, wires and switches. Also in the constructor there were several contact rings for sliding contacts, from which it was possible to assemble the simplest controller for cyclically controlling the assembled models.
On the picture below is a page from the instructions for the assembly of a traffic light with automatic control:

1969
In 1969, Arthur Fisher continues to develop the electronic direction in his designers and releases the l-e1 set - "Licht-Elektronik":

It was possible to find lenses, mirrors, lamps, mechanical and electronic components in the kit for carrying out experiments and a multi-page booklet with a description of each design variant.
What's next?
Every year fischertechnik released new sets, gradually covering new technical areas. There was a separation into sets for home use and educational. I think that a detailed listing of sets will be tedious. Therefore, instead of a detailed chronological almanac, I will note key, in my opinion, dates in the history of the designer.
1981
This year the pneumatic constructor “Pneumatik”, made as a set of additional parts with pneumatic cylinders, distributors, hoses and fittings, went on sale. For the injection of compressed air it was proposed to use a hand pump or an electric compressor. Later, an upgrade kit appeared, which included parts for assembling a proprietary piston compressor with an electric motor, a cylinder and a receiver. This set has gone through several revisions and is now being released as a designer 516185 "Pneumatics 3".

1982
A year after pneumatics, several sets with hydraulic drive appear on the market. In these sets, one of the included cylinders was used as a pump. There is a legend that these kits did not receive further development due to the mass discontent of parents who were faced with floors flooded with water - apparently, they had never been in a workplace where there is hydraulics.

1985
The key moment in the history of fischertechnik - the first designer with the possibility of computer control - fischertechnik Computing went on sale. In addition to this set it was required to purchase an Interface electronic unit for communication with a computer. A total of 7 units were released to connect to popular computers of the time, among them: Apple, Sinclair, Acorn, Commodore. And the IBM PC was not on this list. The module for connecting to IBM appeared only in 1986.

Connection diagram of sensors and actuators to a computer through an interface unit:

With this set it was possible to get acquainted with the technology of computer control of various machines and technological processes, and even build a small welding manipulator. For programming it was proposed to use the programming languages BASIC and PASCAL. Included was a booklet with a detailed analysis of each task and examples of source code.

A little later this year, two more sets devoted to automation and robotics — Trainingsroboter and Plotter-scanner — came out.
Designer "Trainingsroboter" for the assembly of the current model of the manipulation robot with the function of learning movements:

Designer “Plotter-scanner” - it was possible to build a plotter and a computer-controlled scanner from it.

1987
The next set in the Computing series, as you probably already guessed, was dedicated to mobile robotics. In 1987, the fischertechnik “Computing-Experimental” kit was released.
A cart built from this constructor was connected to a computer via an interface unit and could move by executing commands in accordance with a program written in BASIC or PASCAL languages. Of course, the constant availability of a cable for communicating with a computer severely limited the space for experimentation, but already in the didactic booklet there was a whole chapter devoted to the hit of modern educational robotics - following the line (line following):

1991
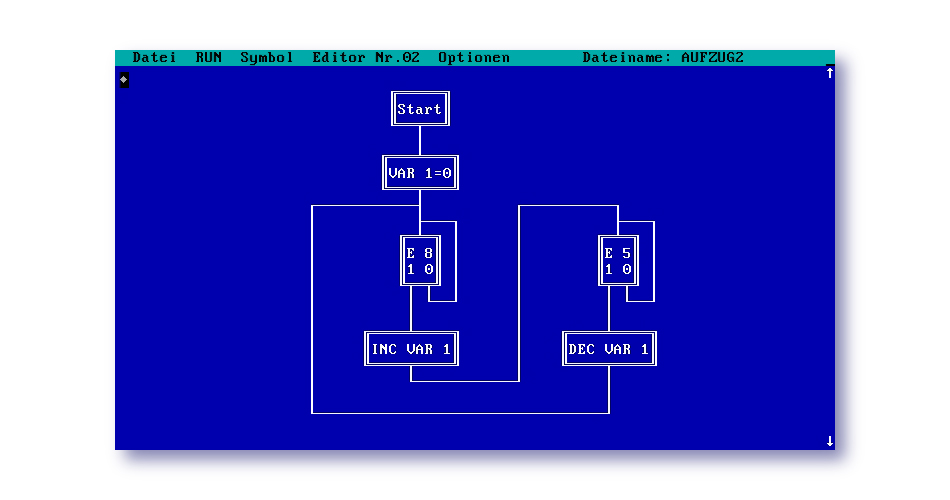
The pace of development of computer technology continued to increase, and as a result, in 1991, new software LuckyLogic appeared in the fischertechnik toolkit - a training package for developing control programs in a visual language in the form of a block diagram. Graphic user interfaces were still far from entering the market, so LuckyLogic software used pseudographics. If you caught the time of NC or VC, then the following picture will be familiar to you:
1997
The next generation of instrumental software comes out in 1997 under the name LLWin for Windows OS 3.11 and 95. In LLWin, the control programs, as well as in Lucky Logic, are compiled in the form of flowcharts. In addition, it is possible to build multi-threaded custom algorithms, subroutines, local and global variables are supported, and there are also visualization and user interface elements - buttons and indicators:

Simultaneously with the LLWin software, fischertechnik is releasing a new Intelligent Interface control unit - a full-featured programmable controller with a processor and RAM, which allows you to build stand-alone models that can work independently without constant communication with a computer:

To download control programs to the controller, a connection to a computer through the RS232 interface was required.
1999
After mobile robots in 1999, fischertechnik releases the Pneumatik Robots kit, dedicated to pneumatic drive in industrial automation. From the designer it was possible to assemble 8 models of various production machines with pneumatic drive. The key elements of this set were electromagnetic pneumatic valves that were connected to the controller outputs and used to control the supply of compressed air to the pneumatic cylinders.
The picture below shows the electrical and pneumatic diagrams from the assembly instructions:

2004
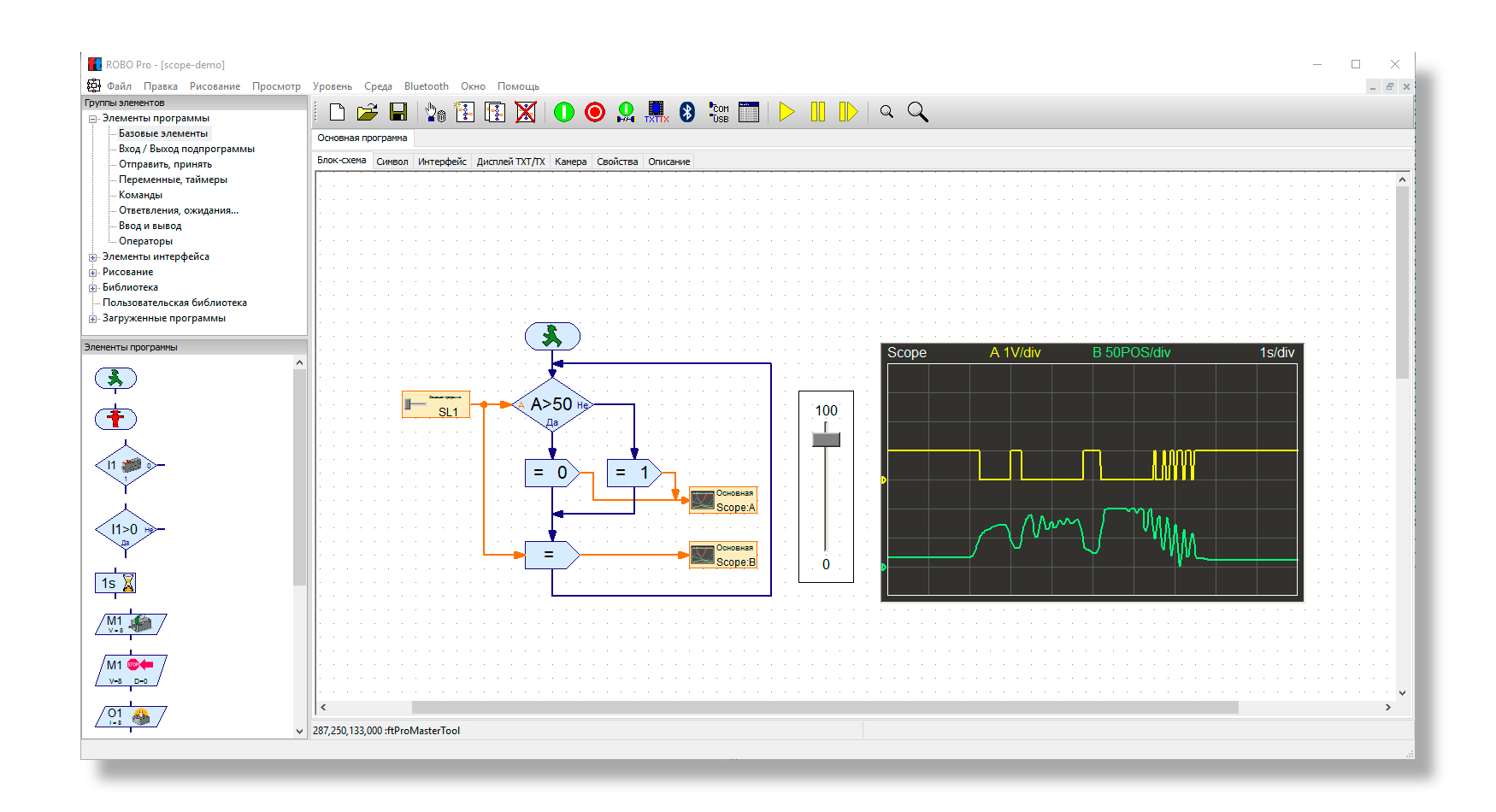
The next iteration in the Computing series of fischertechnik designers began in 2004 with the release of the new ROBO Interface controller and the new version of the ROBO Pro software.
At the same time, the design kits were updated. New versions of Robo Mobile Set mobile robots, Industry Robots II industrial robots and Robo Starter Set for beginners have been released.
The new ROBO Interface controller has acquired flash-memory, so now the programs did not disappear after turning off the power. To connect to a computer, you could use RS232 or USB interfaces. The ROBO Pro tool software was developed from scratch and offered the user an expanded set of functions for developing and debugging control programs in the form of flowcharts:
2010
The ROBO Interface was replaced in 2010 by a ROBO TX controller built on an ARM9 processor with integrated Bluetooth and USB interfaces. The controller has a display to which it was possible to display user information. The controller had 4 outputs for connecting motors, 8 universal inputs and 4 inputs for signals from encoders. If necessary, it was possible to increase the number of inputs and outputs by connecting another ROBO TX through the expansion connector. In total, it was possible to assemble 8 controllers in one network and thus get 64 inputs and 32 outputs.
The controller was part of the new designer dedicated to mobile robotics, the ROBO TX Training Lab.

2014-2017
Currently, the ROBOTICS series of fischertechnik designers use two controllers - BT Smart and TXT, the beginner and advanced levels, respectively. The controllers are supplied both separately and as part of the ready-made 540586 BT Smart Beginner Set and 524328 TXT Discovery set .
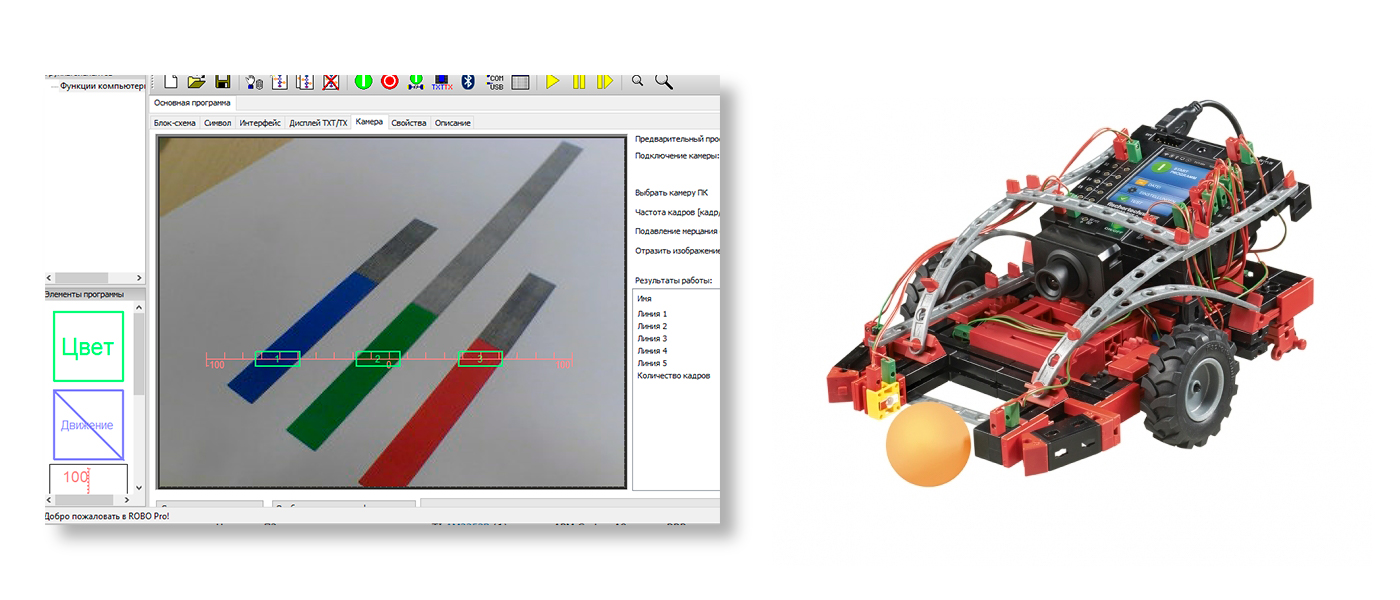
The ROBOTICS TXT controller is designed as a dual processor system based on ARM Cortex-A8 and Cortex-M3 processors. It has built-in wireless interfaces Bluetooth and WiFi, as well as a standard set of communication buses: I2C, CAN, USB, USB-Host and another IR receiver. TXT is running the GNU / Linux OS. If desired, you can boot from micro-sd flash-card.
The main feature of this set is the presence of a powerful system of computer vision, which can be used to solve problems of automatic control of various objects.

For programming controllers, the software ROBO Pro Light and ROBO Pro are used. And ROBO Pro Light exists in the form of an application for iOS and Android. In addition, you can use the programming languages C, C ++, Python and any others for which there is a cross-compiler or the ability to run in a Linux environment. For a separate group of users it is possible to use Scratch.
In the pictures below, a mobile robot from the ROBOTICS TXT Discovery Set with a computer vision system in real time determines the coordinates of geometric objects in the frame and hunts for a ball:
Perhaps to review these kits will require a separate article. Therefore, at the end there will be a survey.
As a conclusion
52 years ago, Arthur Fisher invented an original gift for his clients, which eventually turned into an engineering designer fischertechnik. Perhaps now history repeats itself and we have a great opportunity to make a New Year's gift to the younger generation. A gift that can distract future inventors from the continuous consumption of digital content.
As usual, for lovers of engineering creativity who have mastered the entire post, a 20% discount on the gktmswlkm code until 14/12/17 inclusive in the Pakpak store. Glory to the robots!
Sources of information and pictures
')
Source: https://habr.com/ru/post/374075/
All Articles