DIY disco laser set from a pointer and arduinka
For a New Year's dance party, I decided to make a simple laser machine that would demonstrate something to the music. At hand was a laser pointer with a set of interchangeable rotating caps, which allowed to get nice effects on the ceiling. Adding a pair of servos and arduino mini pro - got what was required.
The scheme is very simple (one key that controls the laser pointer; a pair of silicon diodes for lowering the voltage for the pointer; a resistor for the electret microphone and a ready-made DC-DC voltage converter from a five-volt battery), performed on a piece of the development board.
The microphone with such a simple inclusion - has a rather low sensitivity, so the device should be placed close enough to the speakers.
')
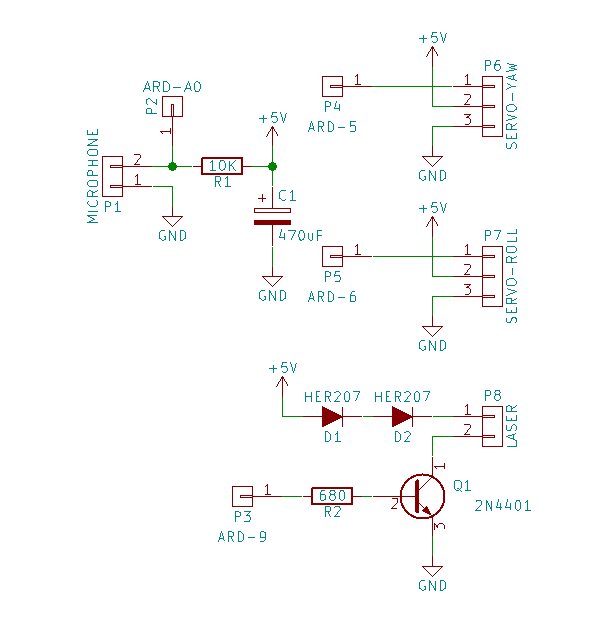
It should be noted that despite the presence of a key to control the laser pointer - I’m not actually using it (always on), so you can just throw it away. Well, or add some blink, if you want.
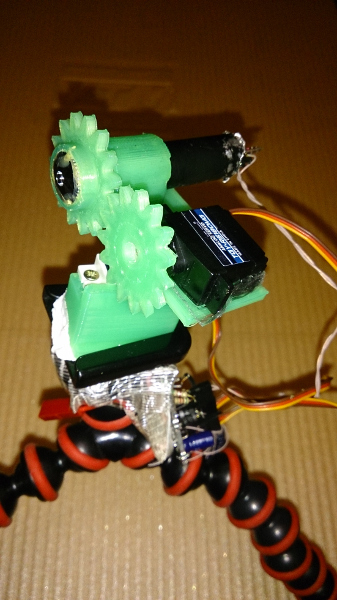
Theoretically, it would be much better to use the motor with a gearbox to rotate the cap (to avoid noticeable jitter), but with a servo drive it was easier (printed a couple of gears on the printer and that's it).
Servos - Turnigy TGY-R5180MG (180 degrees, to rotate the cap) and some old 9 gram server (to rotate the device itself). The stand is a fan tripod that hobbyking was selling for a penny.
Video of work:
Sketch:
Thanks for attention!
The scheme is very simple (one key that controls the laser pointer; a pair of silicon diodes for lowering the voltage for the pointer; a resistor for the electret microphone and a ready-made DC-DC voltage converter from a five-volt battery), performed on a piece of the development board.
The microphone with such a simple inclusion - has a rather low sensitivity, so the device should be placed close enough to the speakers.
')
It should be noted that despite the presence of a key to control the laser pointer - I’m not actually using it (always on), so you can just throw it away. Well, or add some blink, if you want.
Theoretically, it would be much better to use the motor with a gearbox to rotate the cap (to avoid noticeable jitter), but with a servo drive it was easier (printed a couple of gears on the printer and that's it).
Servos - Turnigy TGY-R5180MG (180 degrees, to rotate the cap) and some old 9 gram server (to rotate the device itself). The stand is a fan tripod that hobbyking was selling for a penny.
Video of work:
Sketch:
#include <Servo.h> // yaw servo - PWM #define SERVO_YAW 5 // roll servo - PWM #define SERVO_ROLL 6 // Laser pin - PWM or DO #define LASER 9 // Microphone input - A0 #define MIC A0 // Yaw servo period (in ms) #define YAW_PERIOD 40 // Roll servo period (in ms) #define ROLL_PERIOD 100 // MIN value for yaw servo #define MIN_YAW 40 // MAX value for yaw servo #define MAX_YAW 130 // MIN value for roll servo #define MIN_ROLL 10 // MAX value for roll servo #define MAX_ROLL 150 Servo yaw_servo; Servo roll_servo; // Current position and direction for servos int16_t roll_pos = MIN_ROLL; int8_t roll_dir = 1; int16_t yaw_pos = MIN_YAW; int8_t yaw_dir = 1; // Sound peak detected boolean flag_sound = false; // Internal sound volume average stuff int16_t arr_vol[32]; int8_t arr_pos = 0; unsigned long last_sound = 0; // Detect sound volume peaks void check_sound() { int16_t volume = analogRead(MIC); int i; int32_t sum; int16_t average; // Calculate average from last reads arr_vol[arr_pos] = volume; arr_pos++; if (arr_pos > (sizeof(arr_vol) / sizeof(arr_vol[0]))) arr_pos = 0; sum = 0; for (i = 0; i < (sizeof(arr_vol) / sizeof(arr_vol[0])); i++) sum += arr_vol[i]; average = sum / (sizeof(arr_vol) / sizeof(arr_vol[0])); if (flag_sound && ((millis() - last_sound) > 200)) flag_sound = false; if ((millis() - last_sound) < 300) return; if (volume > (average + 4)) { flag_sound = true; last_sound = millis(); } } // void check_sound() unsigned long last_yaw = 0; // Rotate yaw servo void rotate_yaw() { if ((millis() - last_yaw) < YAW_PERIOD) return; last_yaw = millis(); yaw_pos += yaw_dir; // Change rotate direction when reached limit if ((yaw_pos >= MAX_YAW) || (yaw_pos <= MIN_YAW)) yaw_dir = -yaw_dir; yaw_servo.write(yaw_pos); } // void rotate_yaw() unsigned long last_roll = 0; // Rotate roll servo void rotate_roll() { if ((millis() - last_roll) < ROLL_PERIOD) return; last_roll = millis(); roll_pos += roll_dir; // Rotate faster when we detect sound peaks if (flag_sound) { roll_pos += (8 * roll_dir); if (roll_pos < MIN_ROLL) roll_pos = MIN_ROLL; if (roll_pos > MAX_ROLL) roll_pos = MAX_ROLL; } // Change rotate direction when reached limit if ((roll_pos >= MAX_ROLL) || (roll_pos <= MIN_ROLL)) roll_dir = -roll_dir; roll_servo.write(roll_pos); } // void rotate_roll() void setup() { // put your setup code here, to run once: pinMode(LASER, OUTPUT); digitalWrite(LASER, HIGH); yaw_servo.attach(SERVO_YAW); yaw_servo.write(yaw_pos); roll_servo.attach(SERVO_ROLL); roll_servo.write(roll_pos); Serial.begin(115200); delay(300); } // void setup() void loop() { // put your main code here, to run repeatedly: check_sound(); rotate_yaw(); rotate_roll(); delay(10); } // void loop() Thanks for attention!
Source: https://habr.com/ru/post/373017/
All Articles