The student made a mechanical leg that jumps twice as high as its height.
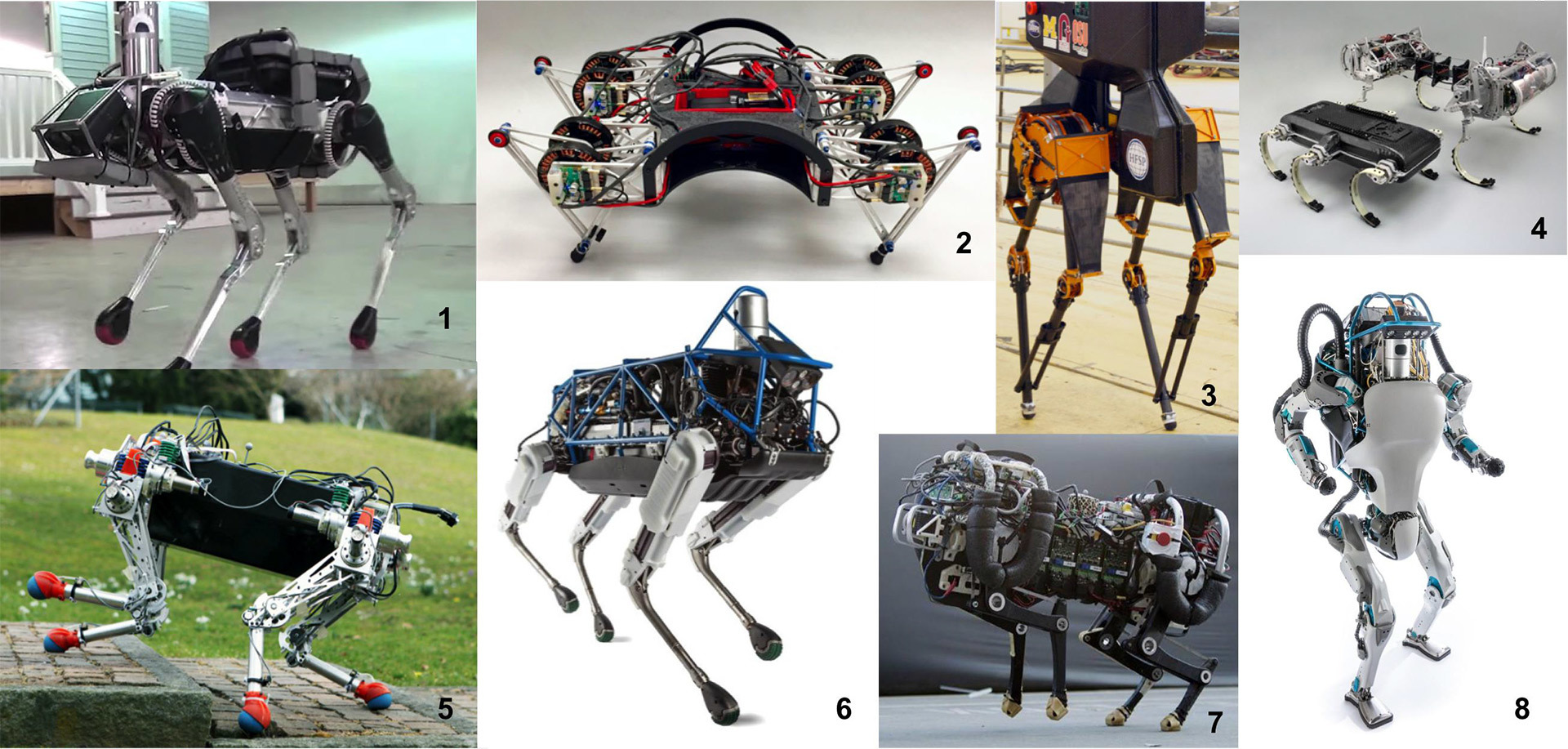
Some of the existing robots capable of vigorous foot movements: 1) Boston Dynamics SpotMini; 2) UPenn / Ghost Robotics Minitaur; 3) ATRIAS; 4) RHex and Canid; 5) StarlETH; 6) Boston Dynamics Spot; 7) MIT Cheetah; 8) Boston Dynamics Atlas. Illustration: Simon Caluche / Carnegie Mellon University
With rare exceptions (see above), modern two-legged or four-legged robots are not capable of vigorous dynamic movements. Humanoid robots almost never know how to run and jump, and four-legged robots have only recently mastered the basic skills of dynamic movement. But this is a very important skill for any robot that moves over rough terrain and overcomes obstacles. It turns out that more than half of the earth’s land remains inaccessible to them. They just can't get there. This seriously limits the scope of use of robots, because they must be ubiquitous.
As can be seen in the illustration, engineers still can not decide what design legs will be most effective for the robot. Different options are offered. The photographs show robots with different leg structures: straight leg (prismatic), articulated (series articulated), redundantly articulated (redundantly articulated) and flat parallel (parallel planar).
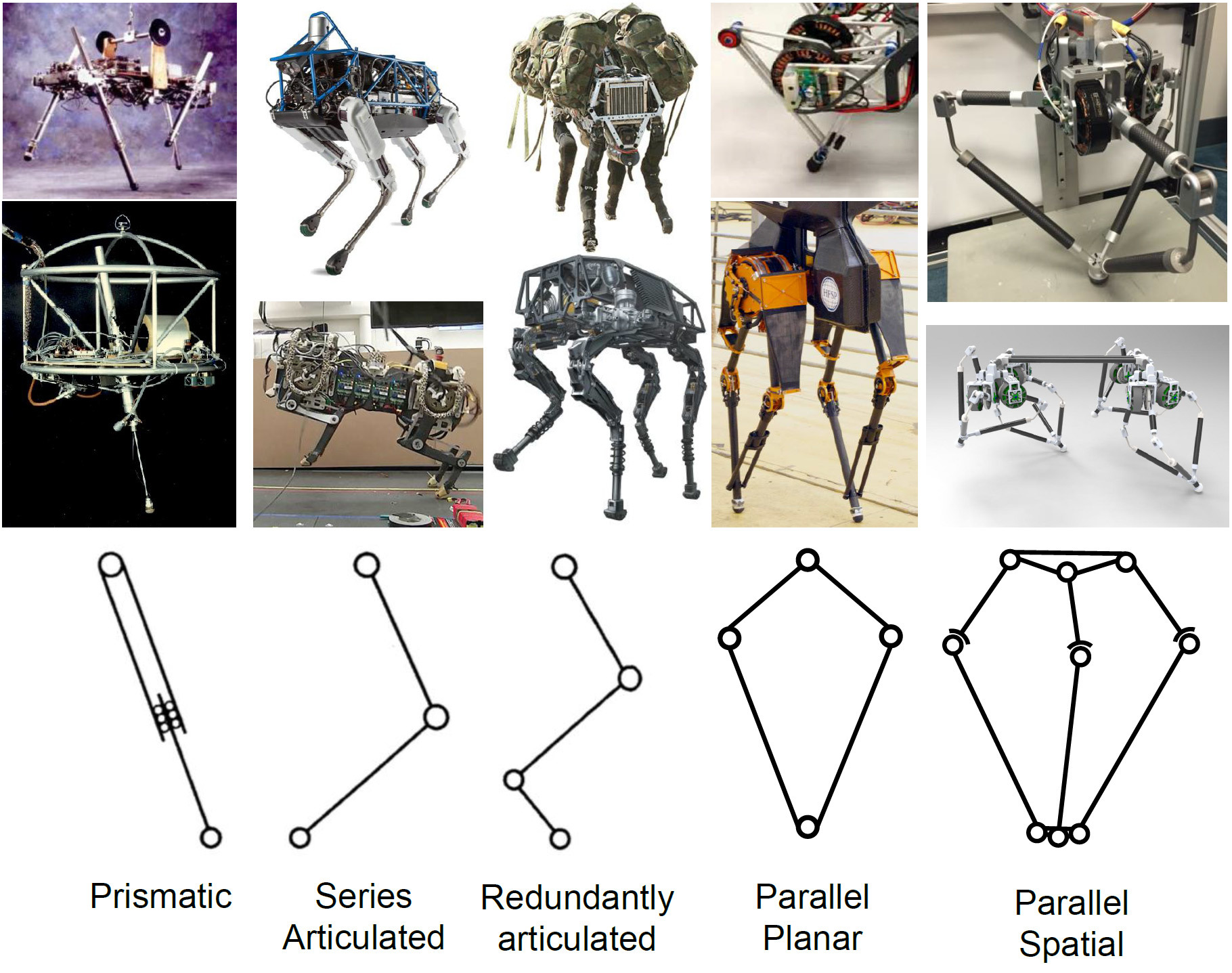
Typical leg structures for existing robots. From left to right from top to bottom: Raibert, BDI Spot, MIT Cheetah, Boston Dynamics Big Dog, Penn / Ghost Robotics Minitaur, ATRIAS, GOAT. Illustration: Simon Caluche / Carnegie Mellon University
')
Simon Kalouche, a student at Carnegie Mellon University, proposed a new type of foot design for a jumping robot: a parallel spatial design (parallel spatial in the diagram). The student also made a working prototype of such a leg, which he described in his thesis (pdf) .

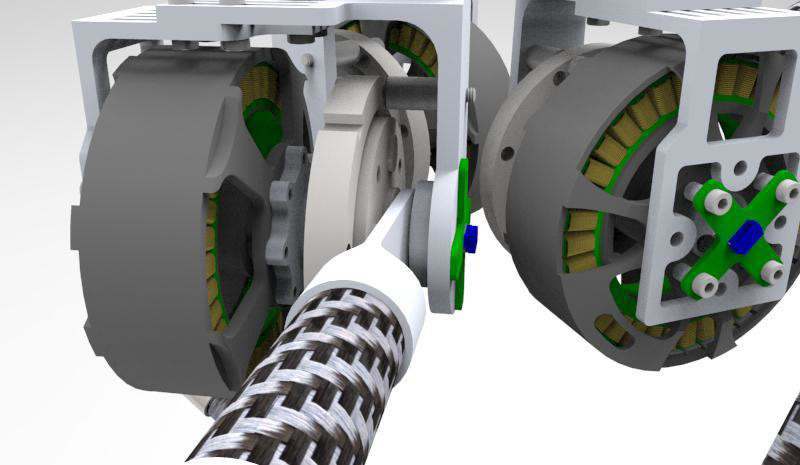
CAD-rendering of a robot with four legs GOAT. Image: Simon Caluche / Carnegie Mellon University
The leg design is called GOAT, which means "Gearless Omni-directional Acceleration-vectoring Topology". In his graduation thesis, Simon Caluche explains that there are examples of mammals in wildlife that are notable for their incredible jumping ability. In particular, it is the Oreamnos americanus snow goat, capable of moving over rough terrain, jumping precipices, jumping from a cliff to a cliff. This animal gave the author inspiration for creating a robotic leg, although the design of the GOAT leg has little in common with the leg of a real animal. But ideally, robots in the future should have the same fantastic mobility as a snow goat.

The mountain goat is jumping over the rocks. Photo: W.Wayne Lockwood, MD / Corbis, Britannica
The space-parallel design of the GOAT leg provides “agile walking, running and, most importantly, explosive jumps in any direction and active soft landing,” the author writes. He agrees that a robot with such legs cannot compete with the famous Cheetah cheetah robot from engineers at Boston Dynamics and the Massachusetts Institute of Technology, but GOAT has an advantage over maneuverability with Cheetah. It is much better suited for the movement of jumps, for example, through the rubble in a disaster zone or a man-made disaster, on the battlefield, in difficult environmental conditions. Such a robot can jump quite high obstacles, fences, walls, climb on the climbs, even with the limit for a man of elevation angle of more than 45 °. Roughly speaking, it is inferior to Cheetah in speed in 1D, but wins in all dimensions of 3D.
The GOAT robot is able to overcome other obstacles encountered on the way: crevices, caves, holes, ditches, trenches. The video shows that the design of the robot provides a soft landing and maintaining balance even after the highest jump.
GOAT leg tests with different settings
The GOAT design uses a T-Motor U10 drive with a Matex 75-7MLD 7: 1 single-stage planetary gearing.
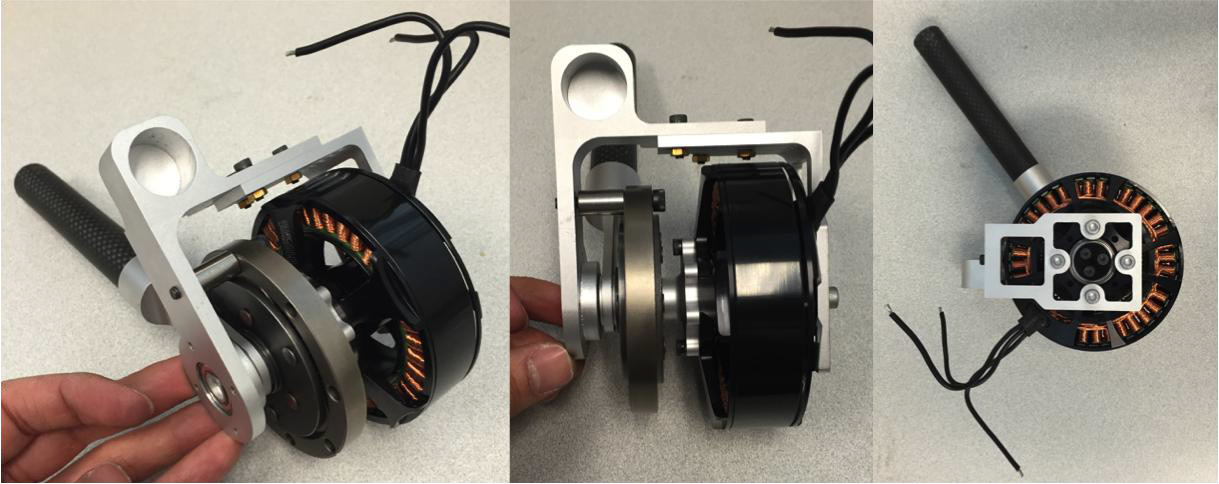
In the thesis, the author compares the different types of motors. The table shows the test results of four types of drives: gearless T-Motor electric drive (DD, direct drive), T-Motor electric drive with one planetary gear (QDD, quasi-direct-drive), T-Motor electric drive with two planetary gears (GM, gear motor), as well as the Hebi X-5 SEA electric drive.
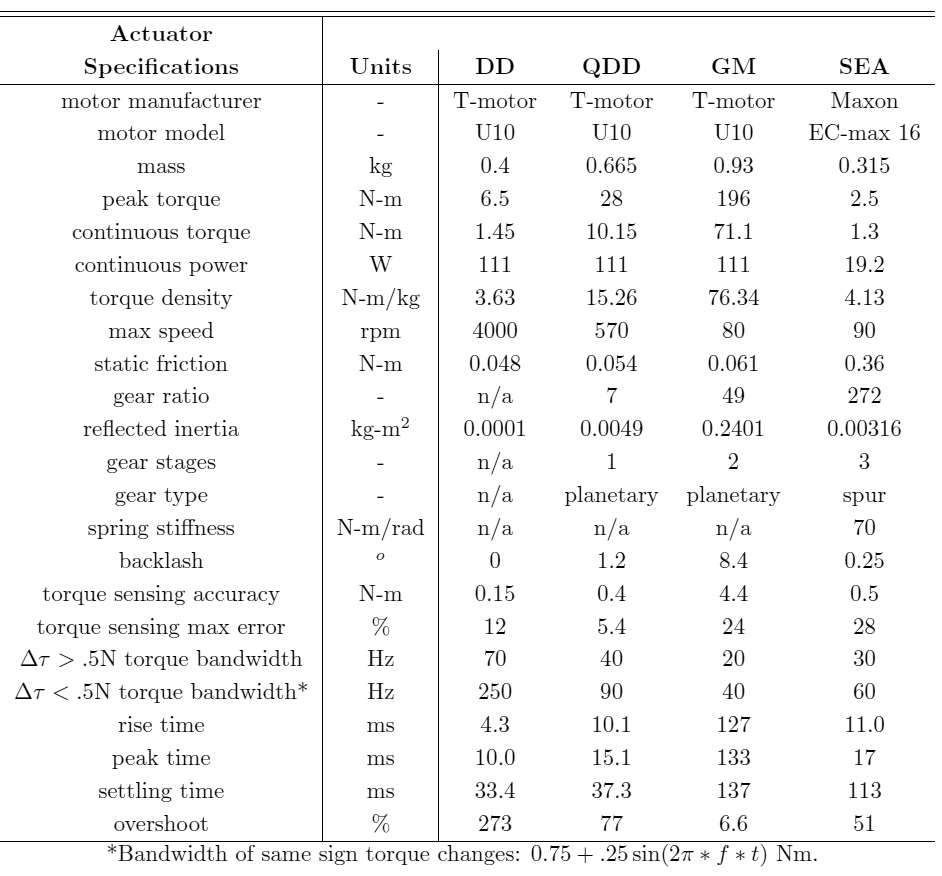
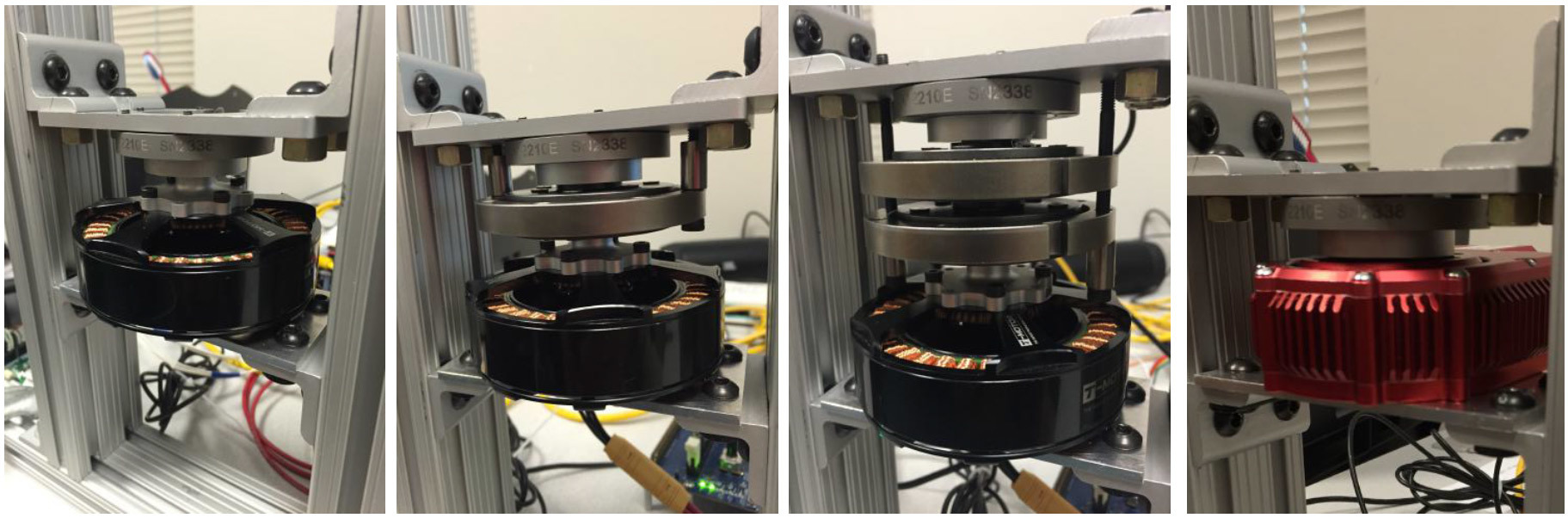
All four types of drives are shown in the photos, from left to right: DD, QDD, GM and SEA.
The author says that each electric drive has its drawbacks, so I had to compromise. He explains why he chose the electric drive with one planetary gear - it fits into the GOAT design in the most optimal way.
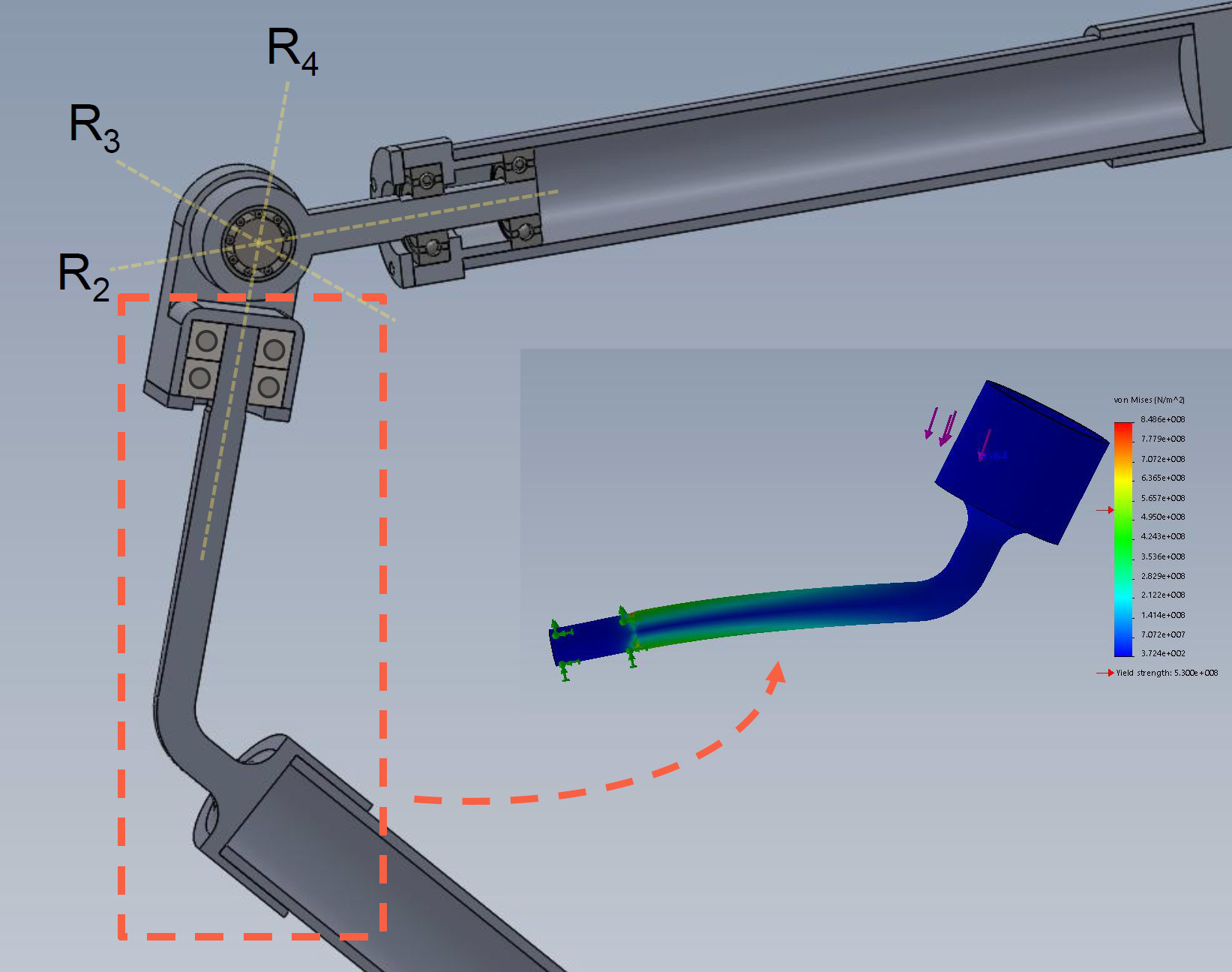
The design of the joint "legs" GOAT consists of three parts with intersecting axes. Modeling in Solidworks FEA showed that such a joint is under pressure up to 123 psi in its lower part. Therefore, this component should be made of high carbon steel with a yield strength of 125 psi, while most of the remaining parts can be made of aluminum 7075 with a yield strength of 73 psi.


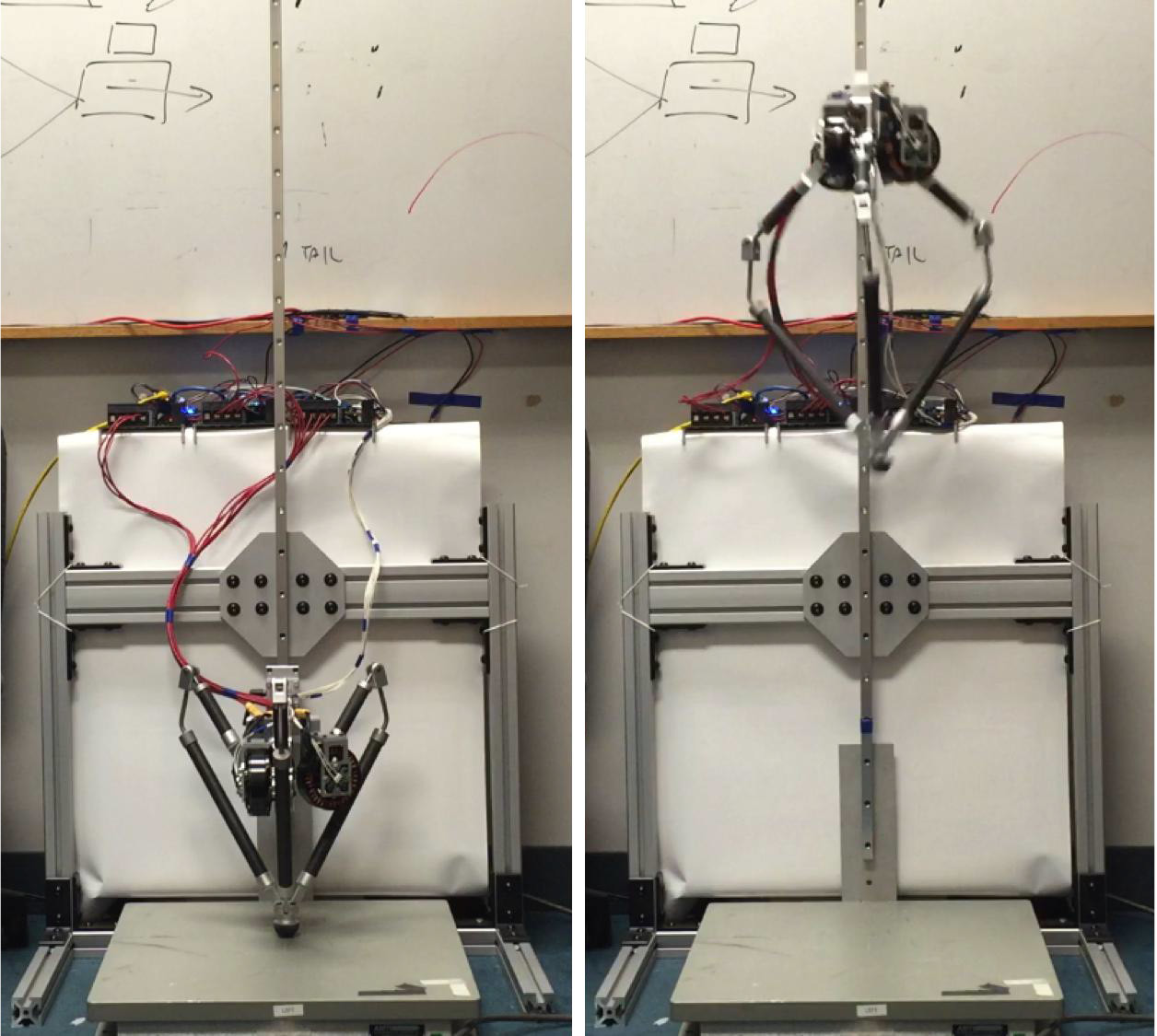
During the GOAT leg testing, a jump height of 82 cm was reached, which is more than twice the height of the structure itself.
So far, Simon Kaluche has made only a prototype of one foot GOAT for thesis. In the future, he plans to continue working on the robot. Perhaps, in conjunction with engineers from other research centers or private companies, it will turn out to make a full-fledged four-legged robot, which will indeed be agile to move across rough terrain. Or someone will make such a robot before the author, because his thesis with all the calculations is in the public domain , except that there are not enough CAD files. But you can try to repeat this work.
Source: https://habr.com/ru/post/372587/
All Articles