MIT and Toyota want to free robobom from cartography

Currently, a large number of large and not-so companies are trying to create a future robotic car - reliable, fast and truly autonomous. The ideal is familiar to us all from the descriptions in the media and all sorts of sci-fi works: such a ro-mobile does not need a driver, there may not even be a steering wheel in the cabin. The passenger gets into the car, pronounces the destination, or enters it with the help of the screen / keyboard and the mobile carries the person to the right place.
The “picture” is beautiful, but now this ideal is unattainable due to a number of limitations and problems. Technology has not yet reached the level of development to make the fairy tale a reality. On Geektimes recently information was published that even partially automated vehicle control systems developed by different companies have a large number of flaws. These are errors due to markup, slow processing of data on obstacles encountered on the road, software crashes and a large number of other problems. But the main thing is that now not a single “real” robility mobile can do without a voluminous map of the area on which it moves.
Gigabytes and gigabytes of information about the terrain and features of the roads of the region where the vehicle is located should be loaded into the memory of the car. If we talk about large cities, everything is more or less normal, since maps of well-known and densely populated regions of the USA, Europe and other countries are often updated. But "often" it is not every day, and the usual repair work in this case is a huge problem. After all, just yesterday the accessible roadway today can become a deep ditch, at the bottom of which works are being carried out.
')
If we talk about small towns, located at a distance of tens and hundreds of kilometers from the centers, then a regular update is simply impossible. “Maps even a small city will occupy several gigabytes. If you create maps of an entire country, then you already need high-speed network infrastructure and powerful servers, ”says Teddy Orth, a graduate student at MIT. He and his colleagues are currently working on a project that is able to solve once and for all the “cartographic problem”. According to the authors of the idea, the robility mobile can navigate through the maps, information about which occupies a very small amount of file space. Data on all the roads of the world can fit on a regular flash drive.
To create such a map, there is no need for road markings, coordinates accurate to seconds, and models of treadmills, buildings, and trees are also not needed. Instead, there is only a “direction” that allows the car to choose the right path and arrive at its final destination on time, without delays. The map is based on the principle that is known to any driver who has fallen into an unfamiliar place.
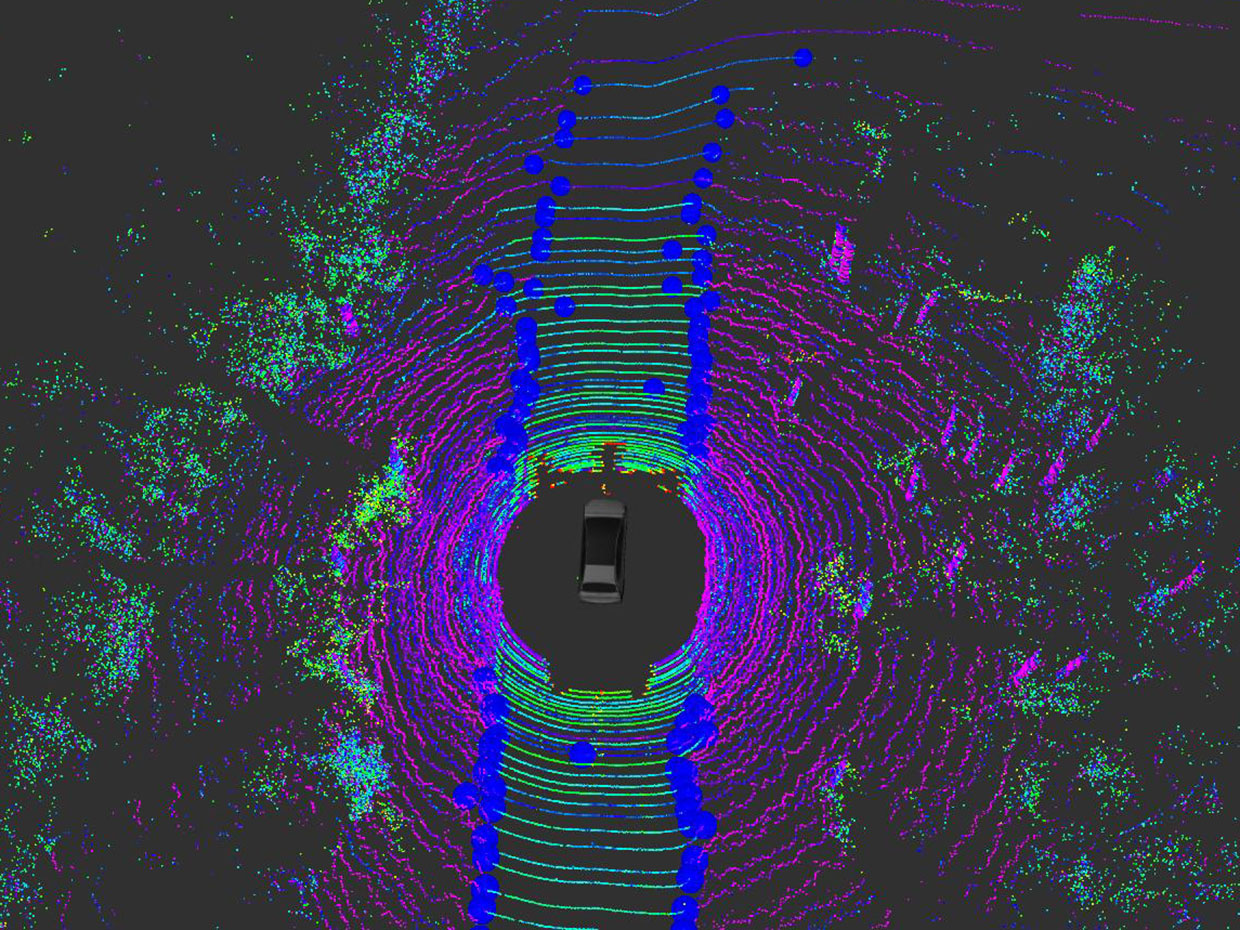
The system from MIT and Toyota received the name MapLite. It is now being tested on the roads of Massachusetts, USA. Developers have much to do, but the project has already passed the stage of proof-of-concept, it really allows cars to navigate in unfamiliar areas. MapLite has already been tested on the Toyota Prius with installed lidars and other sensors. The project was supported by the Toyota Research Institute .
By the way, now far from all robots (or their prototypes) need full three-dimensional maps. Some companies build a map based on GPS, processed in real time. Others teach navigation systems to operate more or less independently in difficult and unfamiliar conditions.
The MIT states that their systems depend neither on training systems, nor on GPS. True, the developers do not report what the salt of the project. Systems that provide the promotion of cars at the right rate, enclosed in a kind of "black boxes", so that access to them is only for developers.
“We use machine learning to make it possible for a car to understand which way it is going. But this is only part of the system, and not the main one. And if something does not work as intended, we can quickly fix it, ”Orth said. The main feature of the new system is that it allows the machine to navigate in unfamiliar terrain.
According to the developers, it is impossible to completely abandon the detailed volume maps. We are talking about a hybrid system, which allows the robomobil to navigate both in the location for which there are maps, and in a place where there are no maps - even in this case, the car will move confidently.
Source: https://habr.com/ru/post/371493/
All Articles