WALL-E based on Arduino UNO with Bluetooth control
After another viewing of the cartoon WALL-E, the idea came to collect for the son of such a robot. Of course, such a robot is sold, you say, and it is called “WALL-E U-Command Remote Control”, but it costs a lot. I did not want to buy another toy, I wanted to, together with my son, collect something of my own, with my own elements and functions. What we did, see below.



')

Began the search for a donor. In the spaces of the well-known auction, a suitable lot of “WALL-E U-Command Remote Control” was found for a symbolic price. From the description of the seller should be the following: the IR remote is lost, one eye does not burn, the left caterpillar does not move. I bought the lot, after a while the parcel arrived, our joy knew no bounds. WALL-E is large, weighty in size, apparently all the details are in place and not broken, the insides didn’t particularly worry me, because I wanted to change everything and redo it. They inserted batteries, turned on - hurray, even something works, it makes sounds and one eye burns. Dismantled WALL-E, to see what was inside and assess the amount of work.
It turned out: a diode in one eye burned out - they were replaced in both with new ones; the left caterpillar does not move because of a bursting star (turned), which is put on the shaft, setting the wheel in motion - the star is drilled together with the shaft, a pin is inserted and the epoxy is missed.
Began the process of upgrading and assembly
Used components:
Sketch reference
')
Began the search for a donor. In the spaces of the well-known auction, a suitable lot of “WALL-E U-Command Remote Control” was found for a symbolic price. From the description of the seller should be the following: the IR remote is lost, one eye does not burn, the left caterpillar does not move. I bought the lot, after a while the parcel arrived, our joy knew no bounds. WALL-E is large, weighty in size, apparently all the details are in place and not broken, the insides didn’t particularly worry me, because I wanted to change everything and redo it. They inserted batteries, turned on - hurray, even something works, it makes sounds and one eye burns. Dismantled WALL-E, to see what was inside and assess the amount of work.
Original insides WALL-E



It turned out: a diode in one eye burned out - they were replaced in both with new ones; the left caterpillar does not move because of a bursting star (turned), which is put on the shaft, setting the wheel in motion - the star is drilled together with the shaft, a pin is inserted and the epoxy is missed.
Began the process of upgrading and assembly
Used components:
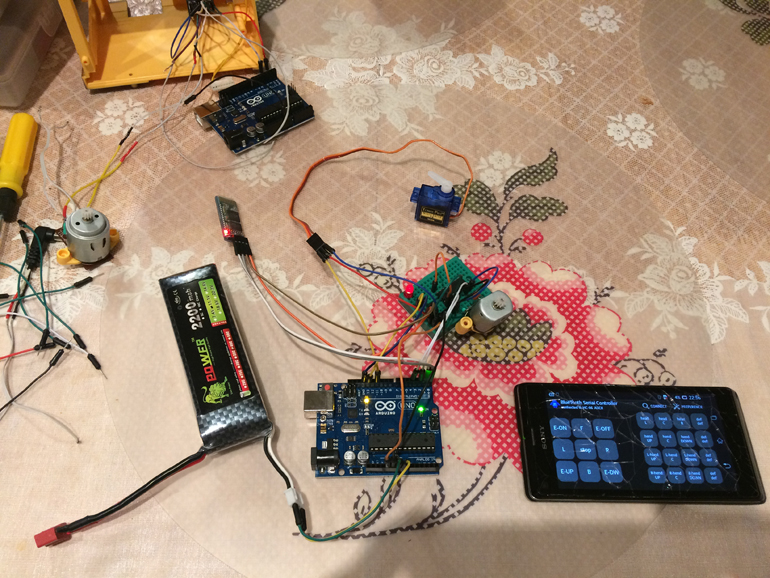
Arduino unoI will not fully describe the assembly and connection, below will be a diagram and a photo, I will describe a few points. In the original design, there are only two motors: one stands in the central module and drives the arms, head and eyes - I removed it, modified the module to install servo drives for controlling hands, head and eyes; the second motor is in the lower left compartment and drives the tracks - it was controlled through the driver of the engine L293D. When the reverse of the motor is carried out a circular motion back to rotate, as in the original version. The playback button for the sounds that were put has been connected directly to the corresponding contacts on the original board. WALL-E is controlled via Bluetooth from an Android smartphone via the BlueTooth Serial Controller app.
Bluetooth module HC-05 JY-MCU
L293D Engine Driver
SG90 Servo Drive - 4 pcs.
Toggle switch - 2 pcs.
Mini Voltmeter DC 4.5-30V
Solderless Breadboard
Wires
Wiring diagram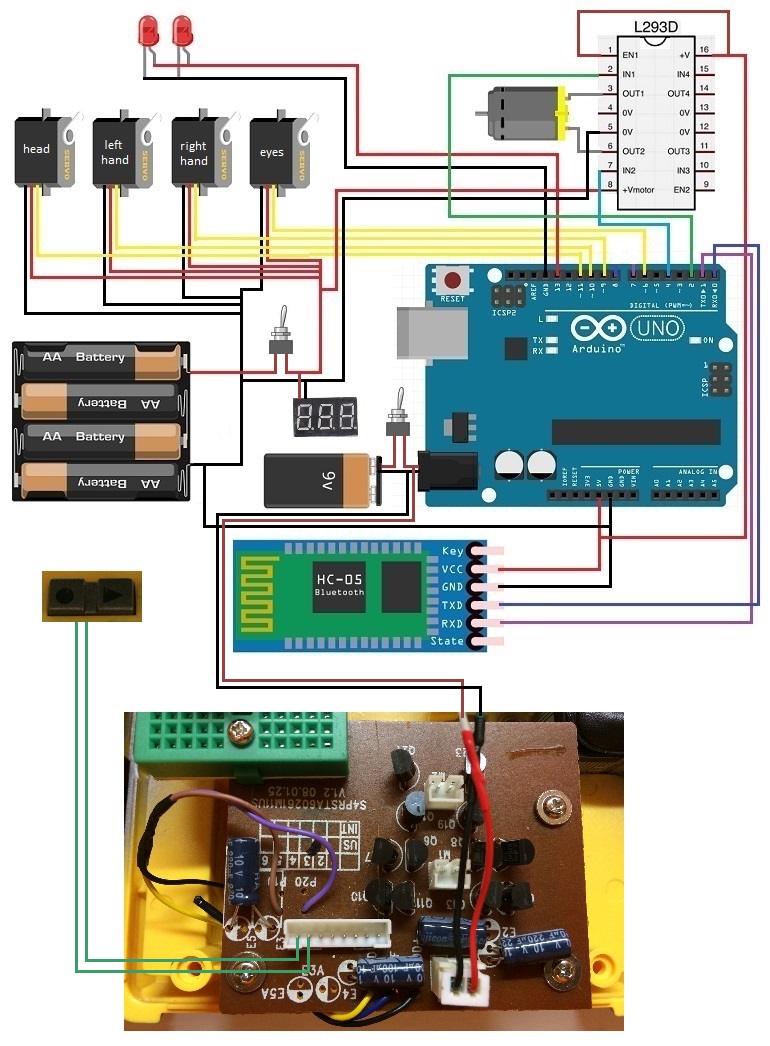
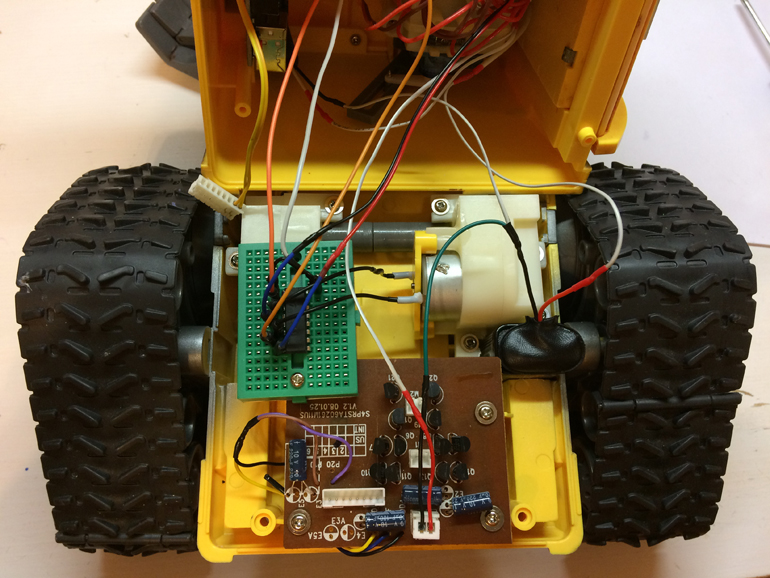
Assembly photos











Sketch reference
Source: https://habr.com/ru/post/371441/
All Articles