Even 5% of unmanned vehicles greatly increase road capacity

Location of cars at the start of experiment A

The location of the car 93 seconds after the start of experiment A, when the first wave appeared with a stop (top right)

The location of the cars in 327 seconds after the start of experiment A, where one unmanned vehicle effectively softens the clusters
')
In 2008, Japanese researcher Yuki Sugiyama (Yuki Sugiyama) and co-authors obtained experimental evidence of a specific physical mechanism that leads to the formation of a traffic jam. When the density of cars is above the critical value, the transition to the plug state is a natural phase transition, like water crystallization at a temperature of -0 ° C, and scientists have obtained experimental evidence for this thesis. Thus, the formation of traffic jams at a given flux density is a natural property of human driving .
Japanese scientists presented automobile traffic in the form of a physical system of many particles, which gives rise to the instability of the free-flow state due to the amplification of their vibrations. Thus, the transition to the state of traffic jams occurs spontaneously and inevitably, if the average density of cars exceeds a certain value. In other words, a specific bottleneck on the road is just a trigger, but not the cause of a traffic jam. If it were not for this bottleneck, then another bottleneck would become a trigger. Moreover, scientists have proven that a traffic jam in the strip will inevitably arise in the absence of a bottleneck and rearranging cars - this was shown by an experiment with a circular motion.

The relationship between the density of cars (under the control of people-drivers) and the capacity of the road. The density is about 25 cars per 1 km lane. Data collected from the results of a month of observations on a single point of the highway in Japan
Impressed by the work of their colleagues, a group of American physicists and mathematicians from Rutgers University, Temple University, the University of Arizona and the University of Illinois at Urbana-Champaign have now decided to check how the properties of this physical system (automobile traffic from human drivers) change when one unmanned vehicle is added to it car.
As in the original experiment of Sugiyama, here 22 cars were evenly distributed over the ring track, and their speed was monitored with a panoramic 360 ° camera. Drivers were instructed to move in compliance with the initial distance behind the vehicle in front. Each car was additionally equipped with an OBD-II scanner to record real-time fuel consumption and, therefore, exhaust emissions. According to the results, it will be possible to calculate the benefits that even a small number of unmanned vehicles bear in terms of fuel and for the environment.
In total, three experiments were conducted: A, B, and C, and two strategies for driving an unmanned vehicle were tested. In the first case, it moved at a fixed average speed (chosen on the basis of observation and entered from outside), so close to it, to avoid a collision, under the control of an automatic system. In experiment B, an experienced driver tried to implement the same strategy. In experiment C, the motion was implemented under the control of a popular proportional-integral controller (PI), which knows only the history of the speed of one of these cars over a period of time. In this case, the car slowed down as it approached the car in front (to avoid a collision) and accelerated as the distance from the car in front increased (so as not to slow traffic).
In all three experiments, clusters of cars (traffic jams) arose dynamically, if all the cars were driven by people-drivers. As soon as 1 out of 22 cars came under control according to the algorithms described above, the clusters dissipated.
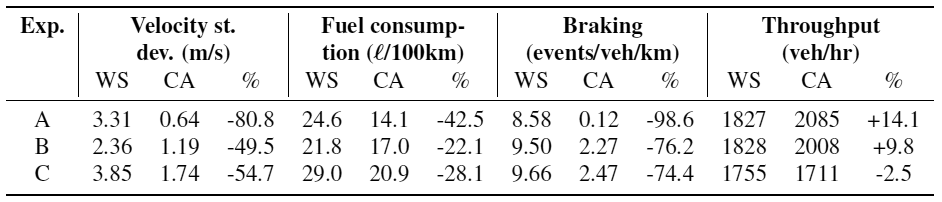
When driving without traffic jams in all vehicles, fuel consumption decreased, on average, by 40%, and the bandwidth increased to 14.1%. The number of braking actions in some cases decreased by 98.6%. For more details on the results of experiments A, B, and C, see the table. The value of WS (wave starts) corresponds to the characteristics of cars after the appearance of the first cluster, when all cars are driven by people. The value of CA is the characteristics after the activation of one unmanned vehicle (control active).
“Properly designing unmanned vehicles requires a clear understanding of people's reactions to them,” explains Benjamin Seibold, one of the authors of the scientific work. “And conducting field experiments plays a crucial role in understanding the interaction of humans and robotic agents.”
This is an example of scientific research at the intersection of the theory of traffic flows, control theory, robotics, cyber-physical systems and transport engineering. Article published May 4, 2017 on the site arXiv.org (arXiv: 1705.01693).
Source: https://habr.com/ru/post/370453/
All Articles