Tertiarm - roboruka printed on 3d printer
Hello! I present to you my project - a roboruk on the basis of a desk lamp with joints printed on a 3d printer.
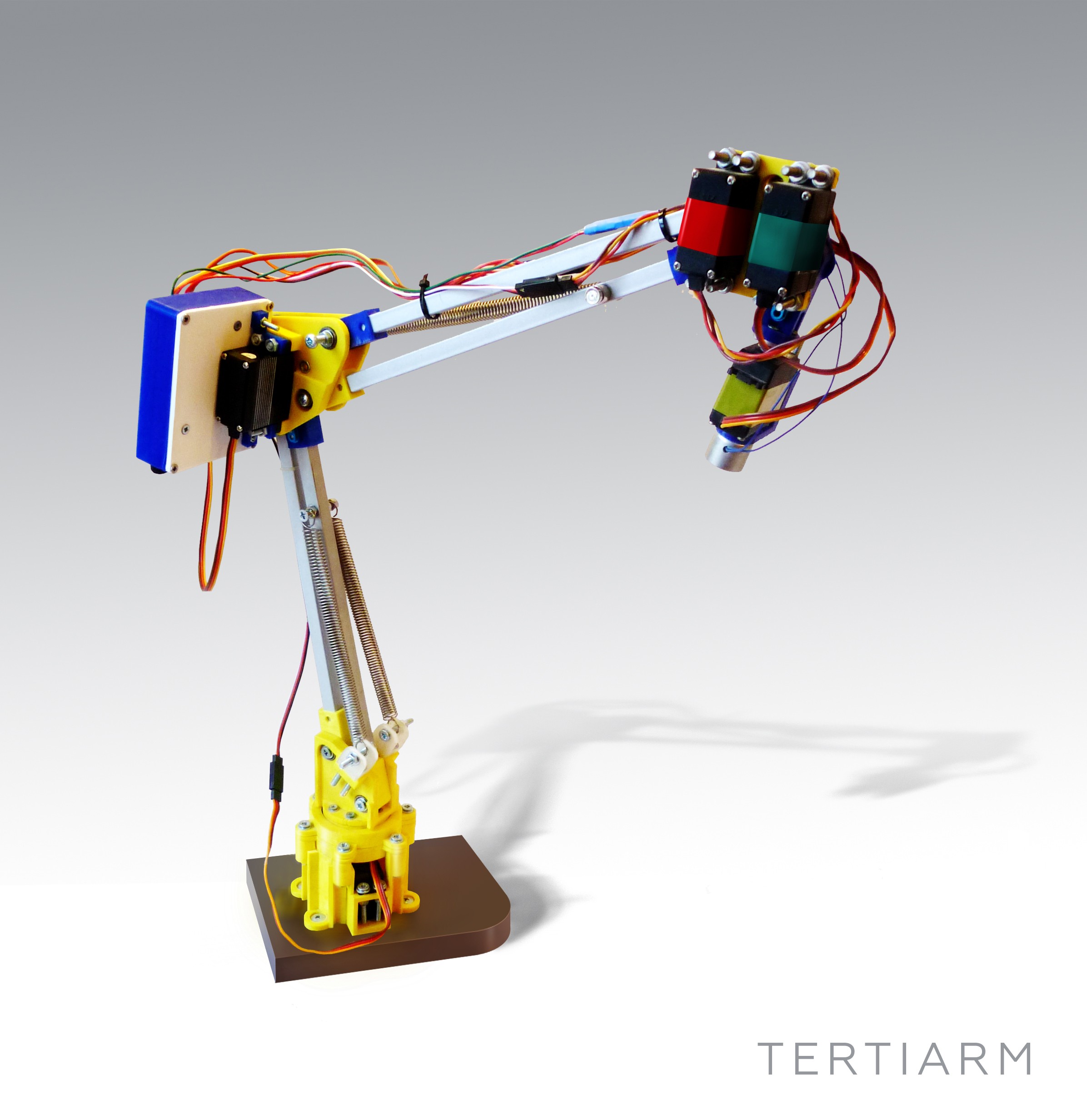
It was decided to use the Ikea lamp, which, thanks to the use of springs, always kept the given position. Accordingly, in the roboruk, the energy of the servo drives is spent only on changing the position of the levers, and the springs hold the weight of the arm and the load. Thus, the load capacity of the manipulator depends on the number and configuration of the springs. For example, in the video with the test of maximum carrying capacity, I use 3 springs in the shoulder joint and 1 in the elbow:
Specifications:
')
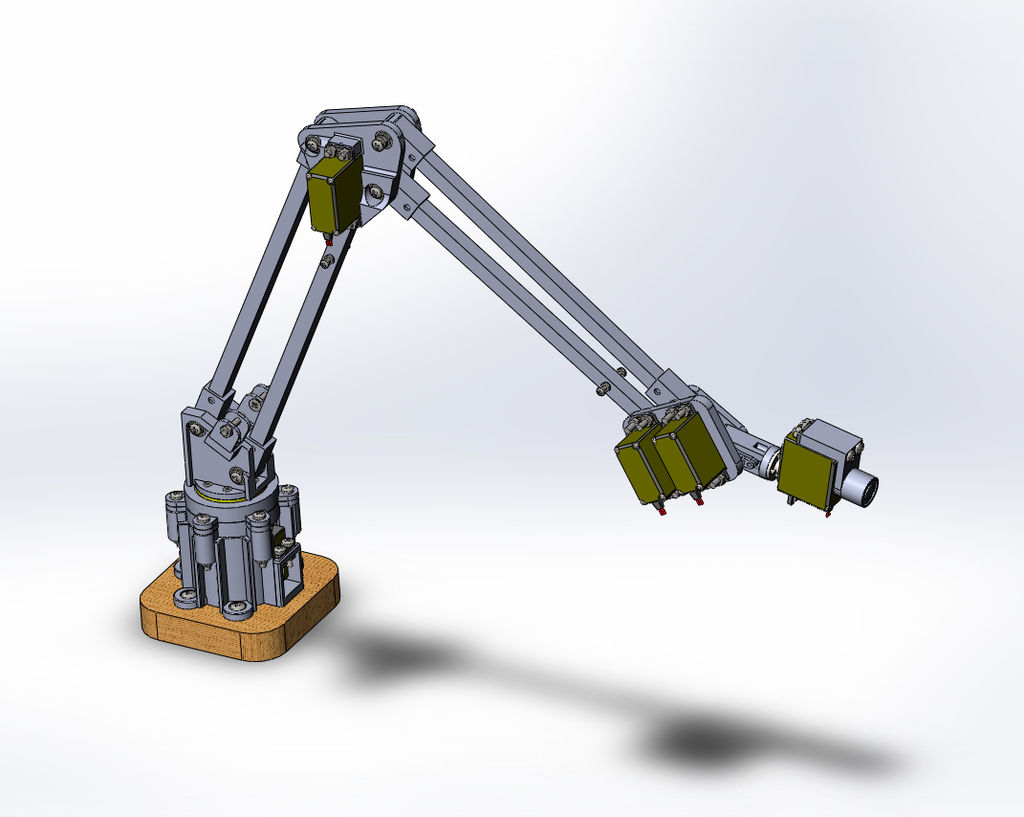
All joints are modeled in solidworks and printed on a 3d printer. The hand has 5 degrees of freedom so far and 5 serv. I used 1- MG958, 2 - MG945 and 2-SG5010.
Controller: Arduino Uno and SensorShield v5.
Capture: 12v magnet.
The test program uses the VarSpeedServo library. It allows you to adjust the speed of the servos and performs each movement only after the previous one.
→ Files for 3d printing and a full list of components on Thingiverse
→ Instructions for assembly Instructables
→ Project page on Hackaday
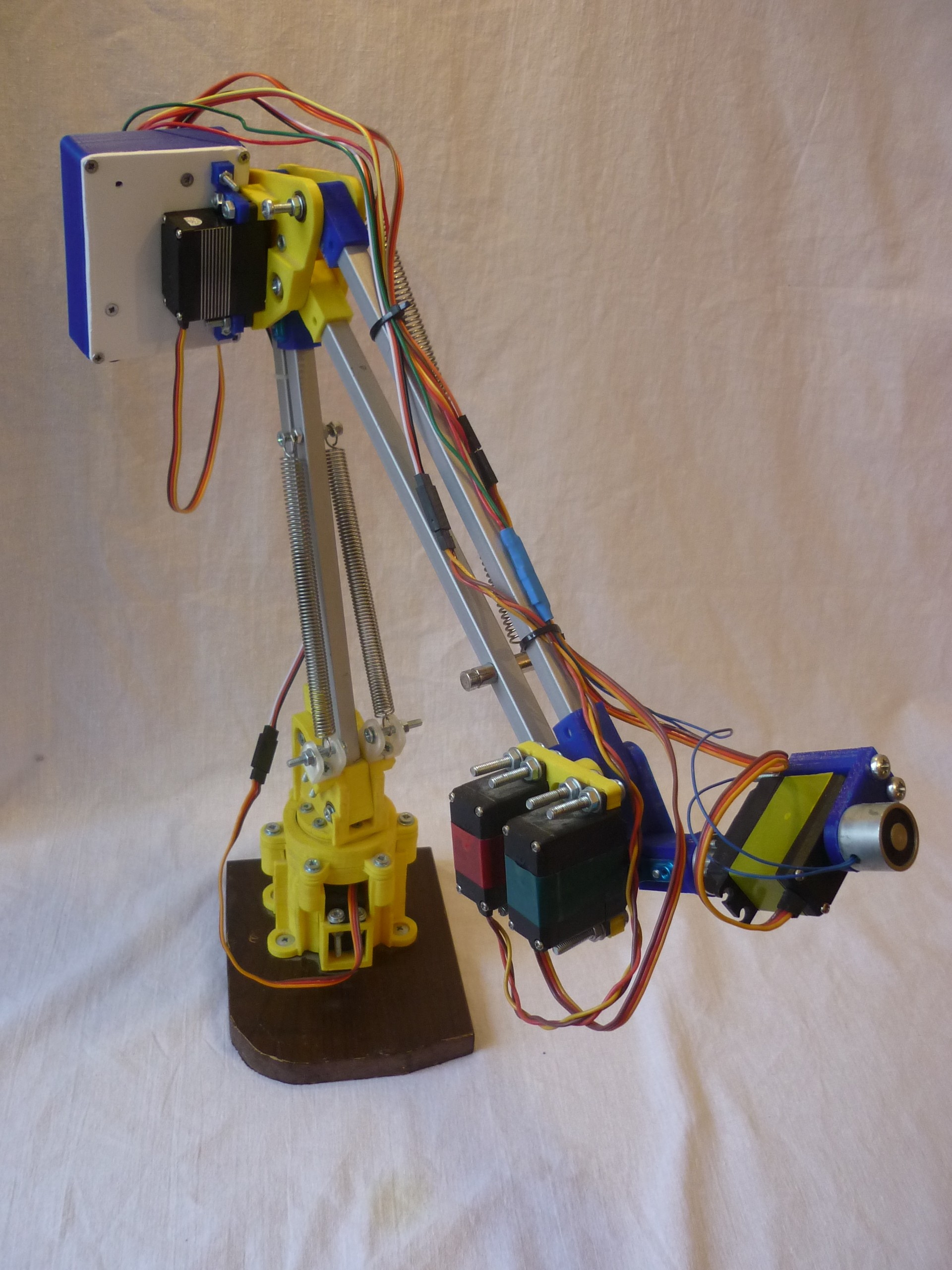
Some more photos:

Thanks for attention!
It was decided to use the Ikea lamp, which, thanks to the use of springs, always kept the given position. Accordingly, in the roboruk, the energy of the servo drives is spent only on changing the position of the levers, and the springs hold the weight of the arm and the load. Thus, the load capacity of the manipulator depends on the number and configuration of the springs. For example, in the video with the test of maximum carrying capacity, I use 3 springs in the shoulder joint and 1 in the elbow:
Specifications:
')
- 5 degrees of freedom
- Full length: 690mm
- Load capacity: 0.5 kg (distance from the base to the point of attachment of the load 500 mm)
All joints are modeled in solidworks and printed on a 3d printer. The hand has 5 degrees of freedom so far and 5 serv. I used 1- MG958, 2 - MG945 and 2-SG5010.
Controller: Arduino Uno and SensorShield v5.
Capture: 12v magnet.
The test program uses the VarSpeedServo library. It allows you to adjust the speed of the servos and performs each movement only after the previous one.
#include <VarSpeedServo.h> int motorPin = 2; VarSpeedServo myservo1; VarSpeedServo myservo2; VarSpeedServo myservo3; VarSpeedServo myservo4; VarSpeedServo myservo5; void setup() { pinMode(motorPin, OUTPUT); myservo1.attach(11); myservo2.attach(10); myservo3.attach(6); myservo4.attach(5); myservo5.attach(3); } void loop() { myservo1.write(150, 30, true); myservo2.write(140, 30, true); myservo4.write(160, 30, true); myservo3.write(160, 30, true); digitalWrite(motorPin, HIGH); delay(500); myservo3.write(90, 30, true); myservo2.write(90, 30, true); myservo1.write(70, 30, true); myservo3.write(140, 30, true); myservo5.write(180, 30, true); delay(500); digitalWrite(motorPin, LOW); delay(500); myservo3.write(90, 30, true); } → Files for 3d printing and a full list of components on Thingiverse
→ Instructions for assembly Instructables
→ Project page on Hackaday
Some more photos:
Thanks for attention!
Source: https://habr.com/ru/post/370053/
All Articles