Blind helicopter landing: review of synthetic vision technologies

Landing on an unprepared site is one of the most difficult elements of piloting a helicopter, it is associated with an increased risk of accidents and human casualties. The need for landing on unprepared sites arises primarily in military aviation: disembarking, evacuating, delivering ammunition and cargo in combat conditions - in these flight tasks it is often necessary to land a helicopter in an unprepared or unexplored landing zone (or hang directly above it).
One of the key problems when landing on unprepared sites are conditions of insufficient visibility (UNV, eng. Degraded visual environment, DVE). The UNV is understood as a weak or zero optical visibility of the cabin environment due to any of the following factors or their combination: poor illumination, adverse meteorological conditions (fog, snowstorm, etc.), raised by a helicopter propeller vortex of solid particles. The last factor is a particular danger.
')
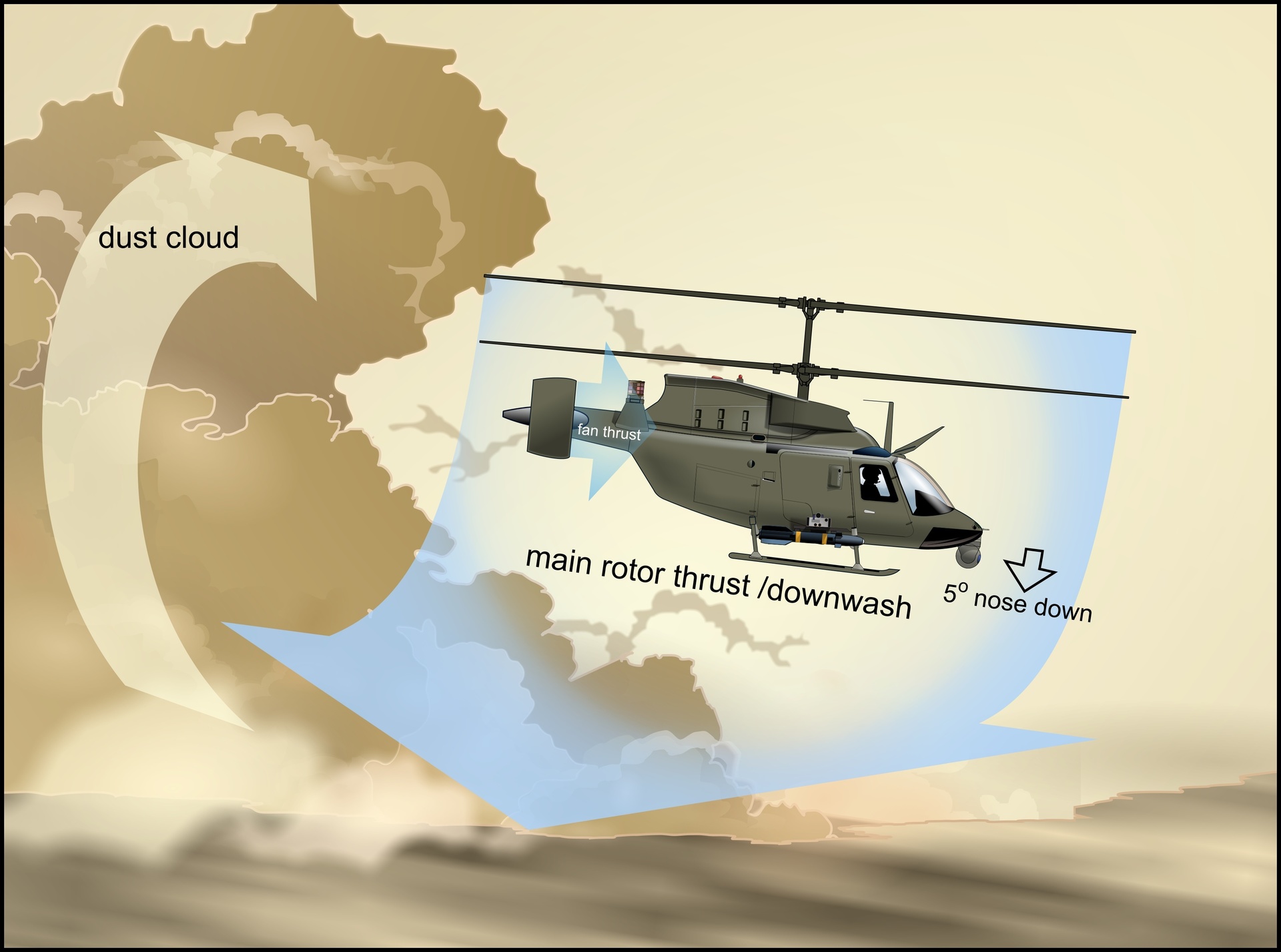
When landing on dry or snowy ground, the air jet from the helicopter’s main rotor raises a solid suspension, which critically reduces visibility and can lead to an incorrect assessment of the helicopter’s position relative to the ground by the pilot, and, in addition, obstacles in the landing zone (large rocks, static and moving objects). The term “brownout” (brownout) describes this phenomenon when landing or taking off on a dry surface. Similar conditions for landing or taking off on a snow-covered surface are described by the term “whiteout” (whiteout).

In the review, I will look at solutions in the field of synthetic vision technologies for the safe landing of a helicopter, allowing the formation of a three-dimensional image of the landing zone through a dusty or snowy whirlwind.
Problem
Solutions
Problem
Blind landing on unprepared sites causes a significant percentage of accidents.
According to the Canadian Forces, from 1986 to 2006. a snow whirl caused two crashes and 54 helicopter crashes.

The crash of a civilian helicopter due to a snowy whirlwind. Canada, 20.05.2000.
Similar statistics are given and landing on a sandy surface. With the start of NATO operations in the Middle East, a dusty whirlwind caused helicopter crashes in approximately 75% of cases. According to the US Armed Forces from 1990 to 2012 more than 30 special-purpose helicopters were disabled and 60 crew members died while landing in a dusty whirlwind in dry climates (Iraq, Afghanistan). The annual material damage to the US Armed Forces from accidents during helicopter landing at UNV is estimated at $ 100 million [1] .

Accident of helicopter AH-64 US Armed Forces. Iraq, November 2003.
Data on the Armed Forces of the Russian Federation are not made public. According to the Department of Flight Safety Inspectorate of the Federal Agency for Air Transport of the Russian Federation in the period from 2001 to the first half of 2014. landing events caused 6 catastrophes and 24 civil helicopter crashes [2] .

The accident of a civilian helicopter during landing. Russia, Yamal, 03.02.2014.
Landing a helicopter in UNV is dangerous because it forces the pilot to rely on his own feelings and onboard navigation equipment, data from which is often not enough. However, while still undergoing training, pilots get accustomed to rely mainly on external visual information when landing, independently viewing the selected landing zone for danger. In this case, ground objects are used by them as landmarks to control the spatial position of the aircraft. This becomes especially important when planting or maneuvering near various obstacles, such as trees, power lines, masts, etc. Because of the instability inherent in all helicopters, which requires extreme concentration during control, pilots must constantly monitor the spatial position of the helicopter.
When controlling a helicopter in UNV, clouds of snow or dust do not allow to see land-based objects with the naked eye. In this connection, the pilot's dependence on his own vestibular sensations increases sharply. However, in unusual gravitational-inertial conditions, such as in the air, the information transmitted by the vestibular apparatus and proprioceptors can be misinterpreted by the brain, which leads to additional physical stress on the pilot and can have potentially dangerous consequences.
Dealing with insufficient and / or contradictory physical sensations, the pilot may experience short-term spatial disorientation. Spatial disorientation in this case is defined as the impossibility of perception, or as an incorrect perception of the movement and spatial position of the aircraft relative to a given coordinate system, which is the surface of the earth and the gravitational vertical [3] .
Such disorientation can take various forms: the pilot is not aware of the side slope of the helicopter; the pilot creates a false sense of side slope, movement or rotation of the helicopter, although in reality the ship is in a state of hovering. The illusion of movement arises from the circulation of snow / dust outside the cabin and can occur in all six degrees of freedom of body movement, that is, the pilot may feel that the helicopter moves linearly along Cartesian axes x, y, z (linear movement illusion) or turns around of three mutually perpendicular axes (yaw, pitch, roll).
Thus, due to the lack of visual contact with the behind-the-cabin environment and the unreliability of one’s own vestibular sensations, for a safe maneuvering (hovering, landing, take-off) in conditions of insufficient visibility, the pilot has to rely mainly on the indications of navigation indicators, information on which comes from the onboard sensors.
However, the sensors installed on modern helicopters do not provide all the necessary information in adverse weather conditions, since they are not capable of effectively scanning the landing zone through a sandy or snowy suspension. In addition, onboard navigation devices do not provide an easy-to-read image at the output, thereby further increasing the burden on the pilot. Thus, unreliable visual-sensory sensations of the pilot and a lack of information from the onboard sensors lead to accidents of helicopters when landing in conditions of insufficient visibility.
When landing on unprepared sites in addition to overcoming UNF directly during landing, already at the stage of approach to the landing zone, there is a need to accurately determine the type, topography and characteristics of the underlying surface. For example, when landing on snow-ice soil, it is necessary to know the composition of the soil, the thickness of the snow-ice cover and its density, in order to avoid dropping a helicopter into a snowdrift or under the ice. At the same time, irregularities with a height of 0.5 m and more and surface slopes of more than 15 ° already present a danger to the landing of the helicopter, especially in strong winds.
So, two main causes of accidents can be distinguished:
1. Insufficient awareness of the helicopter’s spatial position

2. Insufficient awareness of the state of the landing zone

As for the awareness of the spatial position of the helicopter, in general, modern onboard navigation devices (GPS, inertial measuring unit, Doppler velocity meter, gyroscope, radio altimeter) are able to give all of the above information, but only with good visibility. Thus, most modern radio altimeters do not work well in a dusty / snowy whirlwind and do not display the actual height above the ground and the rate of descent.
The situation is even worse with sensors of the landing zone state for viewing through a whirlwind: existing solutions, such as traditional meteorological radar, thermal imaging and TV cameras, are not suitable here, and high penetration sensors are at different stages of technological readiness. About them will be discussed further.
Solutions
Technological solutions to the problem of safe landing of a helicopter on an unprepared site in conditions of insufficient visibility are at different stages of readiness, R & D is actively being conducted around the world to create helicopter landing systems, but at the moment there is no commercial solution ready for mass production.
It is important to note once again that any system solution to ensure a safe landing should solve two problems:
1. to provide situational awareness of the spatial position of the helicopter;
2. to provide situational awareness of the state of the landing zone.
Such a system should include at least two components:
1. highly penetrating sensors for scanning the landing zone in conditions of insufficient visibility;
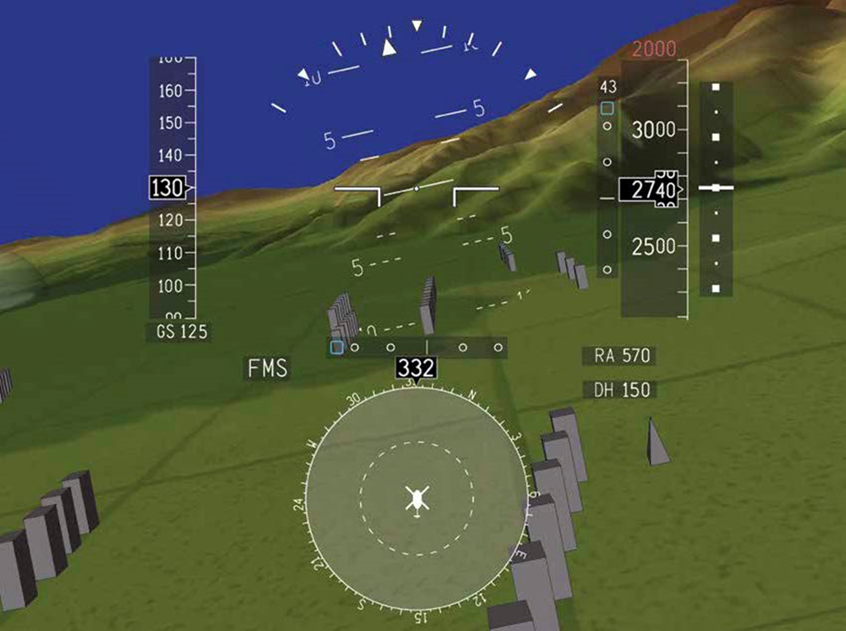
2. display indicator to display data from the sensors in an intuitive for the pilot form (synthetic vision).
Synthetic vision
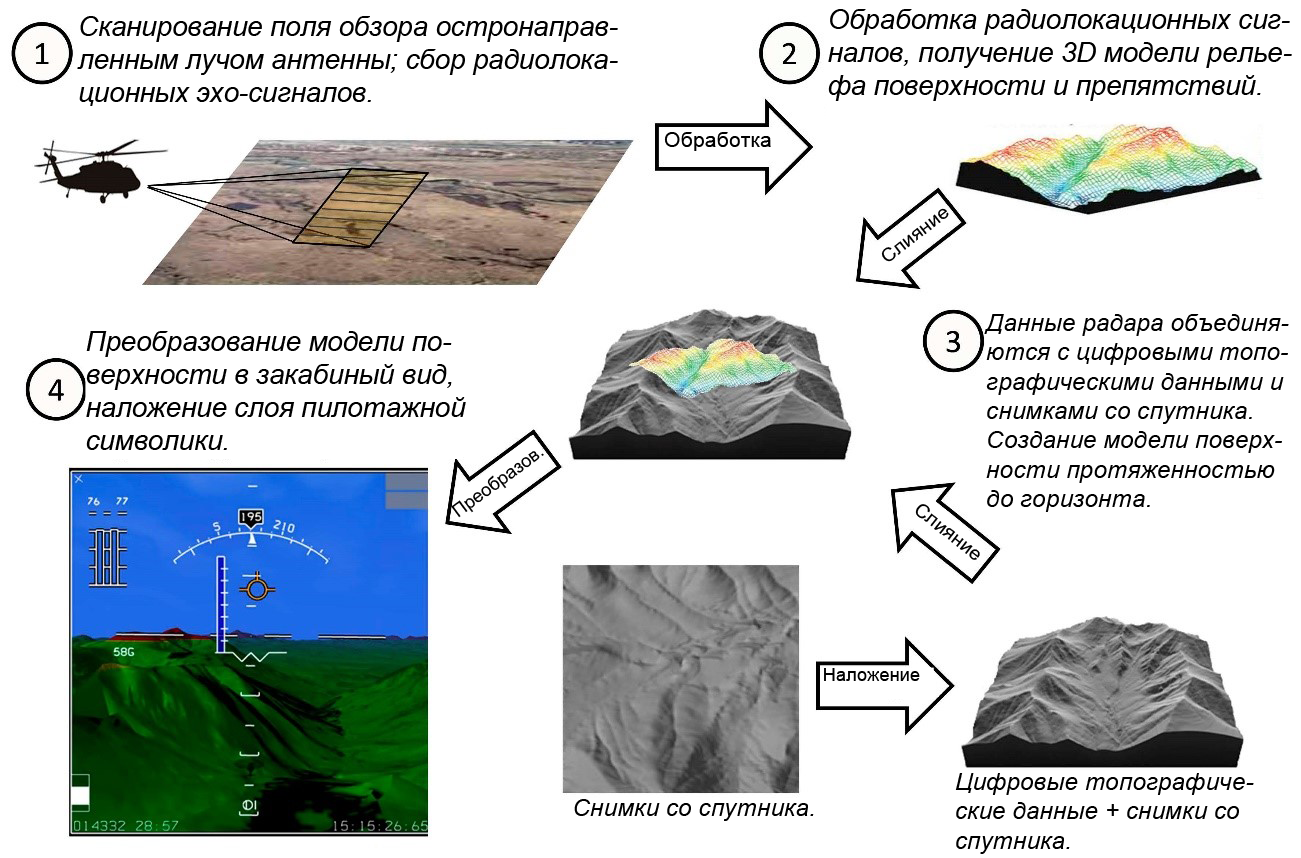
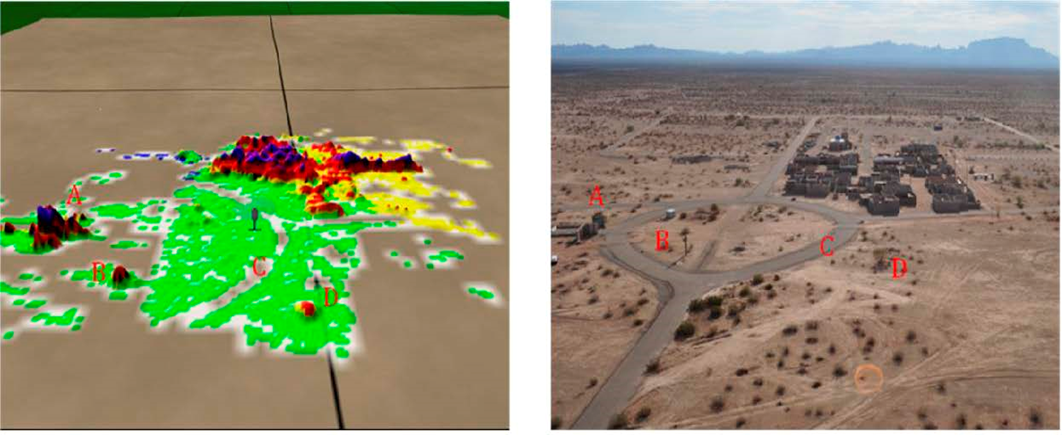
The synthetic vision technology (synthetic vision) involves processing the signal received from the sensors and merging it with the preloaded surface databases, which ultimately results in a synthetic three-dimensional image of the landing zone. Currently, synthetic vision systems are at an insufficient technological level of readiness. The main problems of such systems are to ensure that sensors collect relevant information, including landmarks and obstacles, and also display this information in an easily readable form. It depends on the efficiency of data processing and the reliability of image fusion methods, but neither the one nor the other is a sufficiently developed technology.
Synthetic vision technology
Currently, the most developed technologies developed for existing aerobatic applications. In the field of sensors and sensors, these are GPS, inertial measuring unit, Doppler velocity meter, gyroscope, radio altimeter (determine the spatial position of the helicopter), centimeter radar, TV and IR cameras, laser locators - lidars (determine the state of the landing zone). In the field of indicators, this is a traditional aerobatic symbolism and helmet-mounted indicator modules (day indicator and indicator night vision goggles).
TV and thermal infrared cameras, lidars allow you to view the selected landing zone with good resolution before the start of the dusty / snow vortex, but their effectiveness in UNV is extremely limited. Meteo-radars of the centimeter range have good penetrating power, but their disadvantages are low resolution in range due to insufficient broadband emitted signals, limited scanning speed due to the use of a mechanical drive in most antennas and in a too large blind zone due to the use of pulse signals. All these factors together make the meteo-radar unsuitable for determining the state of the landing zone at short distances, providing sufficient resolution.
The study of the safe landing of a helicopter in a dusty / snowy whirlwind has received much attention in NATO member states, whose armed forces suffered heavy losses from helicopter accidents and catastrophes during combat operations in the Middle East. On the basis of NATO technical reports, the most promising areas for solving the problem of landing in a dusty whirlwind are millimeter-wave radar and laser location. Lidars have higher spatial resolution than radars, however they are subject to higher attenuation in a dusty whirlwind. On the contrary, the millimeter-wave radars have negligible attenuation and provide an acceptable spatial resolution.
W-Range Radars
The active millimeter-wave radar with an operating frequency of 77-94 GHz can effectively scan through a dust vortex. In modern Western models, existing radar technologies are used and adapted, for example, radar homing missiles. Radar information is superimposed on the stored database of the surface, after which a synthetic image of the landing zone with color-marked obstacles is displayed on the display indicator (onboard or helmet).
The largest number of tests of radar landing systems was conducted in the United States.
Sandblaster - USA
From 2007 to 2009 under the auspices of DARPA, the Sandblaster system based on a 94 GHz radar was developed and tested. Sikorsky, Honeywell and Sierra Nevada Corporation took part in the development of the system. The helicopter, equipped with a prototype system, made a successful landing in a dusty whirlwind. Wire detection tests were also conducted, which showed that the Sandblaster dust penetration sensor clearly sees power lines [4] .


System composition:
- 94 GHz Pulse Radar (Sierra Nevada Corp.)
- Surface Database with Relief and Static Obstacle Information (Honeywell)
- Block processing and merging radar signals and databases (Honeywell)
- Aerobatic symbolism (Honeywell and Sikorsky)
- Synthetic vision indicator (Sikorsky)
- Electrodistance flight control system (Sikorsky)

From the report of the pilots who conducted the test of the system: “the resolution of the radar was lower than we would like, and the scan time of the landing site also turned out to be more than we would like.”
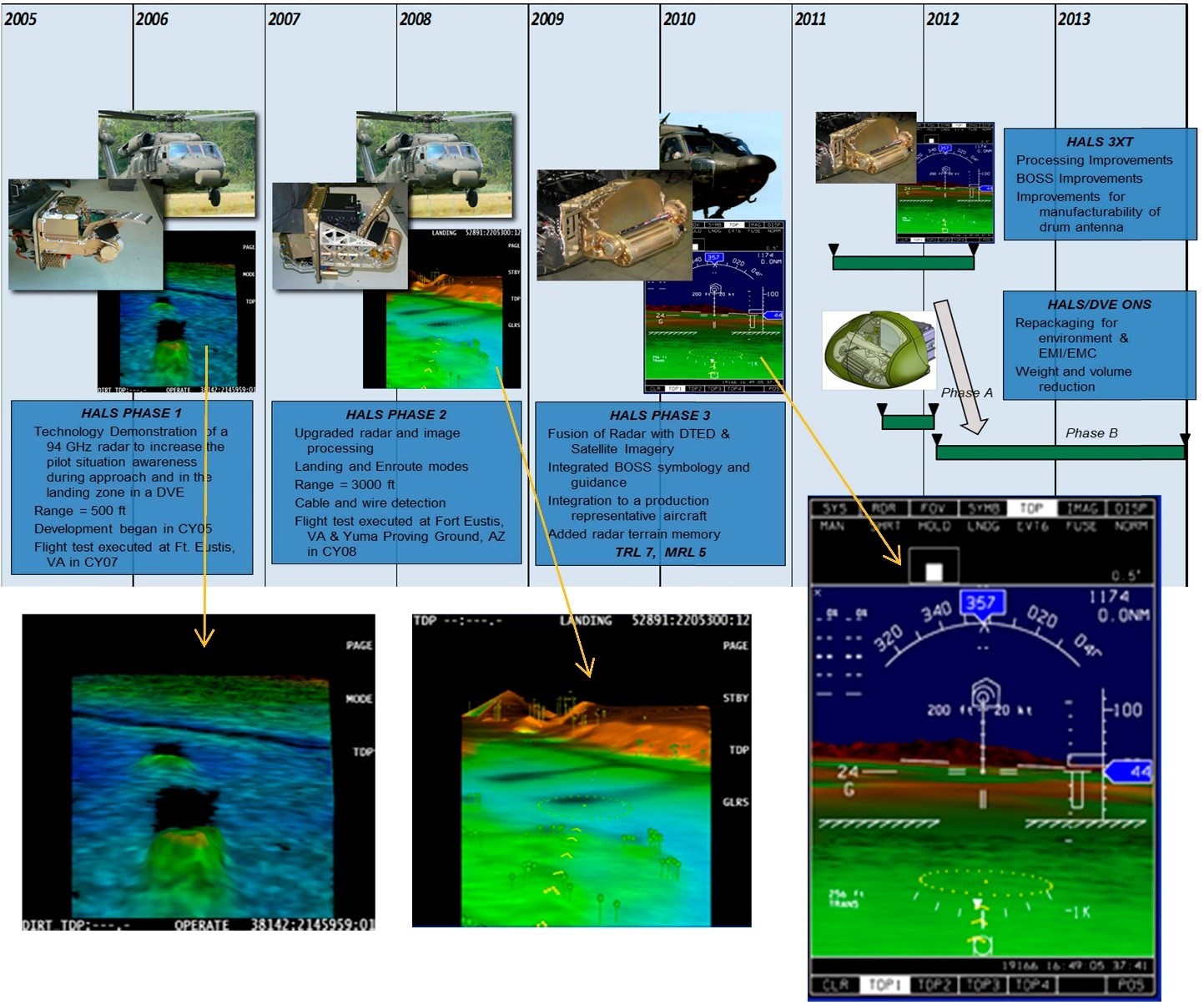
HALS (Helicopter Autonomous Landing System) - USA
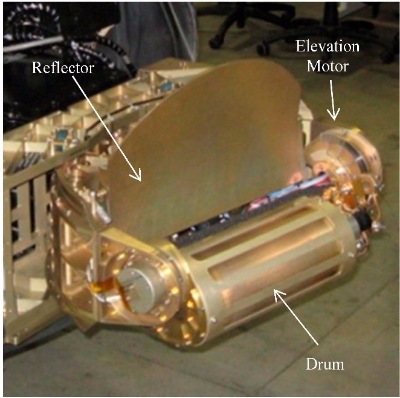
Another landing system based on the W-band radar, HALS (Helicopter Autonomous Landing System), has been developed by Sierra Nevada Corporation (USA) since 2005. Currently, the third generation of the HALS-3XT system is presented. Like the Sandblaster system, the HALS-3XT uses a 94 GHz radar with mechanical scanning. Antenna design with a grille printed on a rotating cylindrical drum, maintains an acceptable scanning speed. The spatial resolution of the scanning system is 20 cm, the radius of view is more than 1000 m.
System composition:
- 94 GHz pulse radar
- Antenna with diffraction grating printed on a rotating cylindrical drum
- Antenna array with electronic scanning (in development)
- Surface databases
- Block processing and merging radar signals and databases
- Aerobatic marks BOSS (Brownout Symbology System)
The development of an electronically scanning antenna array for the HALS system has been reported [5] .
BLAST (Brownout landing aid system) - UK
In the BLAST system (Brownout landing aid system) manufactured by BAE Systems, a single-pulse MBDA Brimstone 94 GHz rocket homing radar is used as a radar.
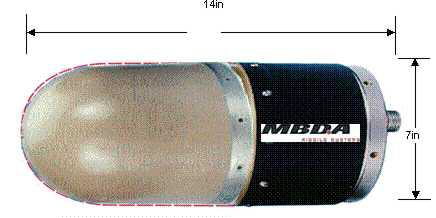
It is reported that the minimum diameter of BLT wires detected by the BLAST system is 3.2 mm. The manufacturer also reports the possibility of replacing the main sensor system with a lidar or a long-wave infrared camera [6] .
System composition:
- 94 GHz Single Frequency Modulated Monopulse Radar (FMCW)
- Used radar missiles MBDA Brimstone
- Surface databases
- Control and signal processing unit
- Aerobatic marks BOSS (Brownout Symbology System)
Lidars
Laser location technologies are also actively developing as a means of ensuring the safe landing of a helicopter. Despite the fact that the lidar (also ladder, light / laser detection and ranging) has a higher attenuation in the dusty whirlwind, rain and fog than the W-band radar, when scanning the landing zone for obstacles, the lidar can provide much higher spatial resolution . Snapshots of the landing zone taken by the lidar sensor before the start of the dusty vortex update the dynamic navigation database, after which an image with color-coded obstacles is displayed on the pilot indicator. The standard detection range of real targets (terrain, houses, trees) is more than 1000 m, the detection range of wires with an average diameter of 5 mm is 600 m.
In 2009, the US Air Force Research Laboratory tested the 3D-LZ lidar system, the sensor for which was developed by Burns Engineering (USA). Scanning resolution was 20 times higher than that of millimeter-range radars. Pilots were able to detect objects 45 cm high [7] .
The lidar system DUSPEN (Dust Penetrating System) is developed by Areté Associates (USA) [8] .
Laser locator HELLAS (Helicopter Laser Radar), produced by the German concern EADS, is actively used on helicopters of the German police and the US Armed Forces. At present, the HELLAS lidar has been improved and is being released by Airbus Defense and Space, a member of the EADS group, as part of the system for the safe landing of the SFERION (Situational awareness system) helicopter.
The ADAS system (Advanced Distributed Aperture System) manufactured by Raytheon (USA) uses optical sounding in the near-IR range, as well as a three-dimensional audio alert to the pilot when approaching obstacles.
The complex solution for piloting a helicopter in conditions of insufficient visibility is the HeliSure system developed by Rockwell Collins (USA).
The HeliSure H-SVS (Helicopter Synthetic Vision System) and H-TAWS (Helicopter Terrain Awareness and Warning System) components improve crew situational awareness and allow you to create a highly realistic three-dimensional image of the underlying surface and landing zone. However, data on the technology underlying the sensors is not publicly available.
Developments
In 2013, the US Department of Defense launched the DVEPS (Degraded Visual Environment Pilotage System) program, under which a comprehensive landing system for UNV should be developed by 2018. The program involves Boeing, Rockwell Collins, BAE Systems, Sierra Nevada Corp.
In parallel with this, the agency DARPA launched several new projects designed to help solve the problem of safe landing in UNV (above all, in a dusty whirlwind). As part of the DARPA MFRF (Multifunction RF) project, a radar with an active phased-array antenna (AFAR) of millimeter-wave range is being developed to ensure the landing of military aircraft in UNV. BAE Systems together with Rockwell Collins, Mustang Technology Group, Honeywell, Applied Signal Intelligence and the University of Michigan participate in the development.
The AWARE-LS project (Advanced Wide Field-of-View Architectures for Image Reconstruction and Exploitation) aims to develop a new generation of imaging sensors (IR cameras, lidars, optical cameras, millimeter-wave radars) and data processing algorithms to create a highly realistic image of the cabin environment. in adverse atmospheric conditions. Northrop Grumman Corp. is involved in the project. and the University of Memphis.
1. “Rotary-Wing Brownout Mitigation: Technologies and Training”. A Technical Report by NATO Research and Technology Organization, North Atlantic Treaty Organization (Jan. 2012).
2. Analysis of the state of flight safety in the civil aviation of the Russian Federation in the first half of 2014. Flight Safety Inspectorate of the Federal Agency for Air Transport of the Russian Federation. (Aug. 2014).
3. Robert Cheung. “Spatial Orientation - Nonvisual Spatial Orientation Mechanisms” // F. Previc, W. Ercoline (Eds.) Spatial Disorientation in Aviation. Progress in Astronautics and Aeronautics Volume 203. American Institute of Aeronautics and Astronautics, Inc. Restin, VA, USA. (2004), 37–94.
4. TTPC-AER-TP2-2011 Task outcome report for enhanced piloting and pilotage systems. The Technical Co-operation Program. 2011
5. Jack Cross; John Schneider and Pete Cariani."MMR radar-enhanced vision systems" (HALS) and the radar-Enhanced Vision System (REVS) are proprietary systems, Proc. SPIE 8737, Degraded Visual Environments: Enhanced, Synthetic, and External Vision Solutions 2013, 87370G (May 16, 2013)
6. Brian Sykora. “BAE systems brownout landing aid system technology (BLAST) system”, Proc. SPIE 8360, Airborne Intelligence, Surveillance, Reconnaissance (ISR) Systems and Applications IX, 83600M (May 1, 2012).
7. James Savage; Walter Harrington; R. Andrew McKinley; HN Burns; Steven Braddom, et al. “3D-LZ helicopter ladar imaging system”, Proc. SPIE 7684, Laser Radar Technology and Applications XV, 768407 (April 29, 2010).
8. James T. Murray; Jason Seely; Jeff Plath; Eric Gotfreson; John Engel, et al. "Dust-Penetrating (DUSPEN)“ see-through ”lidar for helicopter situation awareness in DVE", Proc. SPIE 8737, Degraded Visual Environments: Enhanced, Synthetic, and External Vision Solutions 2013, 87370H (May 16, 2013).
Source: https://habr.com/ru/post/369655/
All Articles