Teach can not be programmed
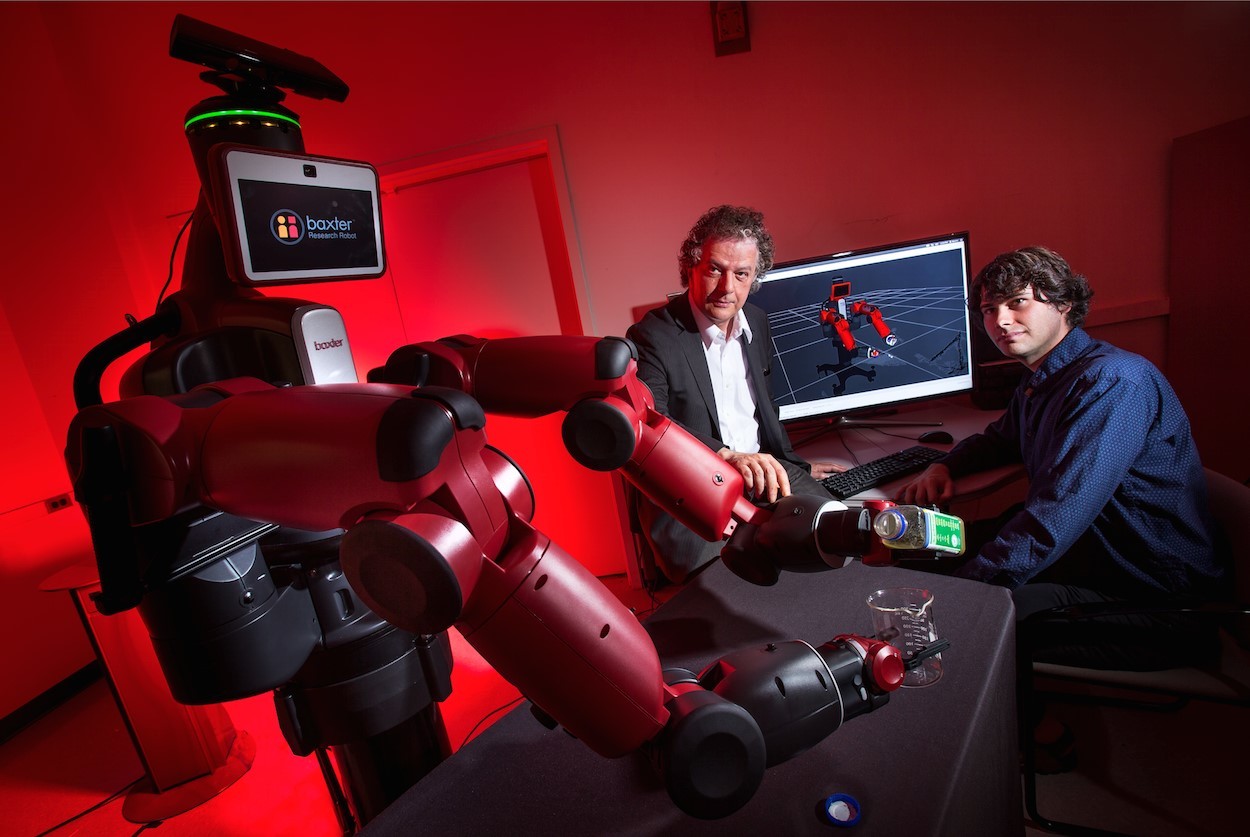
A scientist from the University of Maryland, Yannis Aloimnos, watches Baxter measure the ingredients .
Popular culture has spawned many movies, TV shows and novels about robots. Very often the turning point in the plot is the emergence of a robot that is a head taller than its predecessors. It is about the head, or rather, about the “brains” of the robot, and I want to talk.
Everything points to the fact that a new era has begun in robotics. Today, new models of robots are being created, which tomorrow will work in factories and serve our homes. And if outwardly they have not changed much, compared with the models of the recent past, then their “brains” are something completely different.
Modern robots are not at all like automata manufactured to perform simple tasks as quickly and as cheaply as possible and, ideally, without much human intervention. Today, robots are created in order not only to work hand in hand with humans, but also to learn. Commercial models already available, such as Jibo , Baxter and Amazon Echo , are not only vivid examples and harbingers of a completely new era.
')
Technological advances in recent years have stimulated the emergence of smarter robots. But perhaps the decisive factor today is the development of models capable of self-learning. Creating a “body” of a robot is not so difficult, especially in light of the availability of a variety of electronic and mechanical components. The most difficult thing in robotics is behavior algorithms.
Everyone would like to have such robots that can perform more than one function. Or, at least, that robots perform this function at the highest level. From the point of view of programming, this task is many times, if not by orders of magnitude simpler than creating a robot capable of performing several functions at the same time or exactly the requests that the user needs. And how to take into account the unpredictability of the environment, the uniqueness of the situation in which the robot can be? How to provide an infinite variety of conditions, rules and restrictions?
RoboBrain project
In the first place today comes the need for self-learning robots. In some cases, especially in those projects that are carried out within the framework of research centers and universities, the solution is to collecting data from the Internet. In particular, in RoboBrain , a joint project of Stanford, Cornell and several other universities. Here, developers create a special knowledge network for learning robots.
Project participants do not build robots, but create training databases that describe simple things: what an egg looks like, how to make coffee, how to talk to people. Such databases contain information that robots may need to operate successfully in dwellings or to perform useful functions in industry.
RoboBrain oversees projects related to a wide variety of contexts and areas of knowledge, while the Internet provides virtually unlimited possibilities for storing images, videos and other content suitable for learning the robot. Such a “brain” is trained through examples of things that it should recognize, and tasks that it should understand. Also, this “brain” must be able to confirm that information has been learned or not (thumb up or down).
Project Tell Me Dave
One such project is called Tell Me Dave . Researchers and volunteers from the Internet teach the robot to perform certain tasks in stages. In order to cook the pasta, the robot requires a solid knowledge base - what is each object in the kitchen, what function can it perform, how to control it, and at what stage of cooking should it be used. After all, the real-life robot will need to instantly navigate among a variety of factors and objects, processing general user requests of the form “prepare me pasta”.
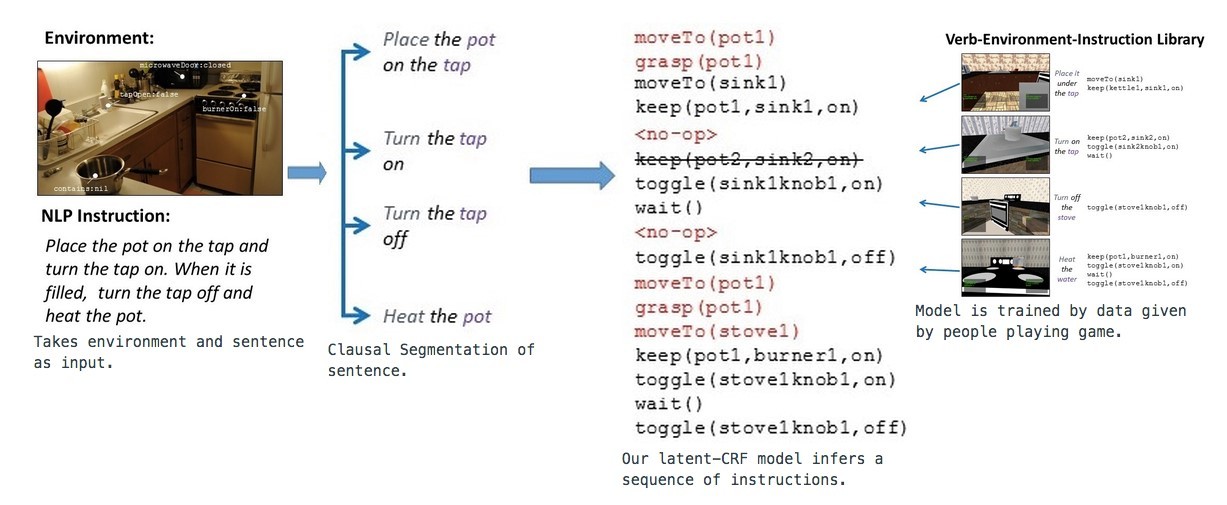
Vorkflou project Tell Me Dave.
Multiply this by the number of at least ordinary household tasks that the user will give the robot, and you will understand why there is RoboBrain. The Tell Me Dave system contains a limited number of learned situations, but, theoretically, it can always connect to the collective database. Thus, she will also know those things she has not been directly trained in — for example, how to paint a wall, or that a person needs at least 45 cm of personal space.
There are many examples of how robots learn from life examples, often under laboratory conditions. For example, the latest research DARPA, where the robot learns to cook, watching videos about cooking.
The main factor for the success of deep learning is the development of artificial intelligence, constant practice and self-improvement of the machine. The mechanisms of visual and auditory recognition, language understanding, are used to accelerate the learning of robots. In-depth learning algorithms are debugged on publicly available images and videos and other content from the network. RoboBrain uses in-depth training to train robots in the proper techniques of movement in space and methods of capturing objects.
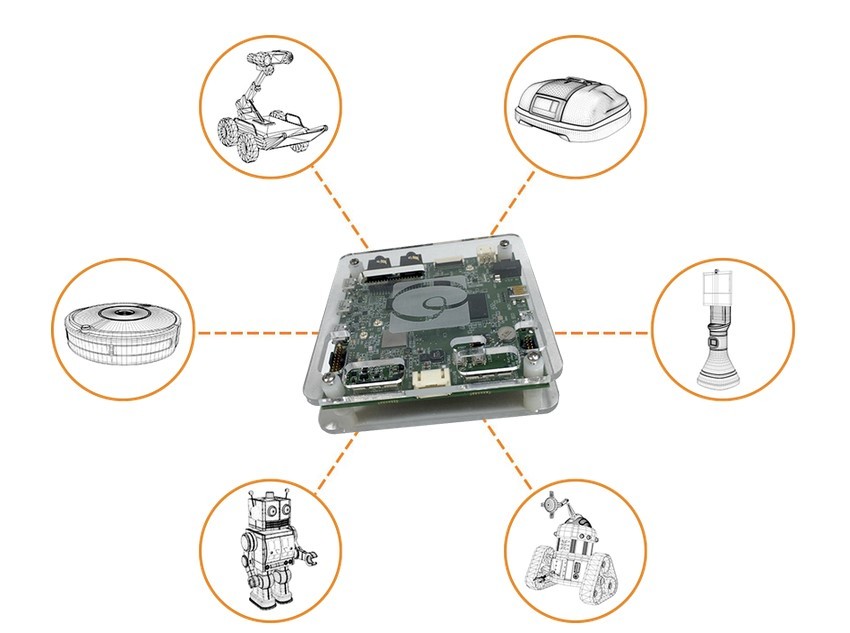
Project Platform Brain Corporation.
Brain Corporation
However, there is another approach to creating robots, according to which they do not necessarily have to be as smart as RoboBrain wants them to be. At least until they learn to distinguish the right from the wrong. To implement this mechanism, a startup Brain Corporation was created. This software and hardware platform, which is based on the idea of modeling a neural network. According to the developers, they can be integrated into the “brain” of the robot and “teach it to different patterns of behavior, similar to how a person trains an animal.”
For example, a robot vacuum cleaner operating on the basis of the BrainOS operating system does not recognize a cat as a cat, but will be able to learn that this object - whatever it is - is not worth vacuuming.
Accordingly, it can be assumed that if such a robot is able to distinguish between what is allowed and what is forbidden in this situation, it will be able to learn to follow objects, find new objects and much more.
Learning difficulties
If the biggest challenge of modern robotics is to train robots instead of programming them, then users will have to devote time and energy to learning a mechanical pet. Perhaps the easiest way out would be to train robots based on BrainOS (or some similar system) in the laboratory, turn it into a database, and then roll into commercial models. But if the user wants to train his robot to work in a particular specific environment, then he himself will have to engage in training.
The “learning” of all sorts of smart gadgets, which can later be integrated into a local network or the Internet of things, sometimes takes a lot of time and effort. Even the simplest operations — for example, training a video surveillance camera — can turn into a whole story. Including for those who are well versed in the algorithms embedded in the technique.
And this can be one of the main obstacles to the “learning” technique. In most cases, people do not want to do anything, they just want to press the "on" button, and so that the robot itself does everything that is needed. But maybe in a few years, users will realize that this kind of artificial intelligence is like animals. You can draw an analogy with dogs: they can bark and lick, but to train them to perform commands or more complex actions, it will take a little effort. Perhaps many will like the idea of not “learning”, but “raising” a robot.
Source: https://habr.com/ru/post/366809/
All Articles