ITER robots
The general public perceives the ITER project primarily as a set of stamps: “sun in a bottle”, “100 million degrees” and “pure and inexhaustible energy for humanity”. But sometimes engineering solutions that remain behind the scenes can bring no less benefit than solving the problem of thermonuclear energy. For example, in the field of robotics ITER will be the most complex and most advanced project in the world. Yes Yes exactly.

Robots brew ITER toroidal magnet section
The need for maintenance, repair, modification of this world's largest tokamak by people is impossible due to the high level of radiation that will arise immediately after the first ITER sessions with thermonuclear burning, due to neutron activation, which I wrote about in more detail last time .
')
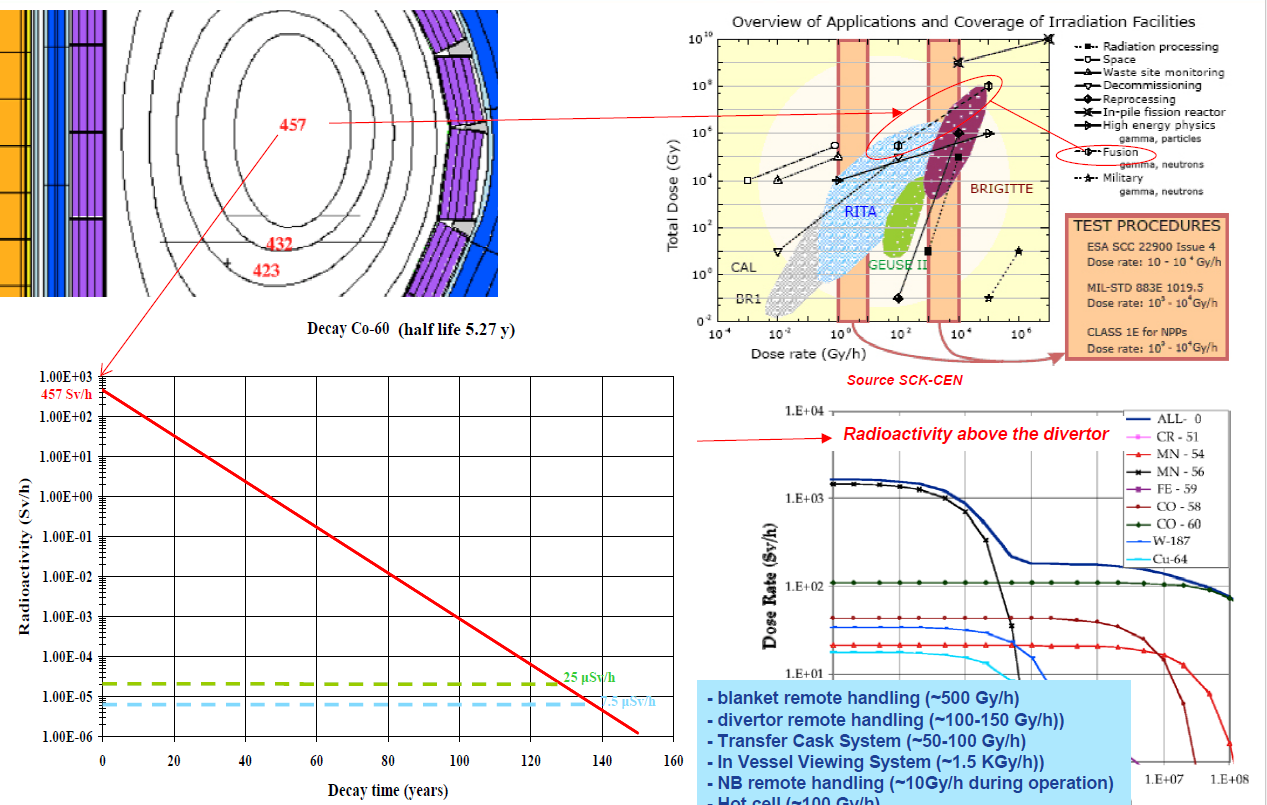
The dose rate inside the vacuum chamber, in sievert and its dynamics over time.
This means that all the work inside the torus and in the immediate vicinity of the vacuum chamber (in more detail about the vacuum chamber, blanket and divertor , which will continue to appear in the text), as well as in the premises of the neutral beam injectors should be performed by a robotic system, or rather a set of various systems . In addition, after the launch of ITER, the hot cells will be added to the permanent research work - to work with the structural elements extracted from the reactor, to repair, repair and update them. The main problem is precisely that all work with absolutely all equipment that is close to the plasma can be conducted remotely - either in the reactor itself, or by exporting it to hot chambers. It's funny, by the way, that it is dark in tokamak, so the robots have to carry the lighting as well.
So, let's see what will be the most powerful complex of remote maintenance of the ITER thermonuclear reactor. In total, it is divided into 7 systems:
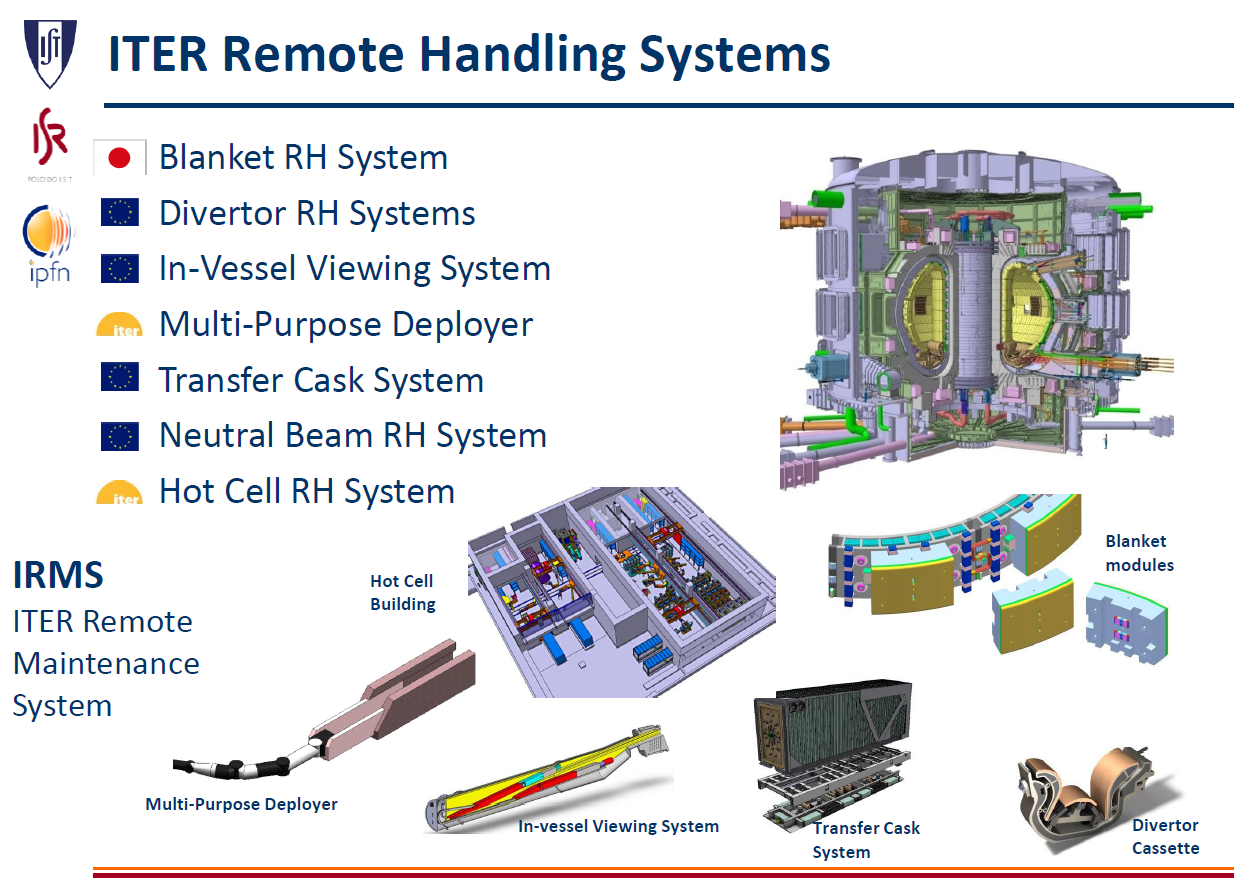
1. The hot cell remote handling system (HCRHS - hot cell remote handling) described above, designed to work with ITER activated elements outside the reactor itself.
Plan one floor of a hot chamber building. Docked shipping containers visible (blue)
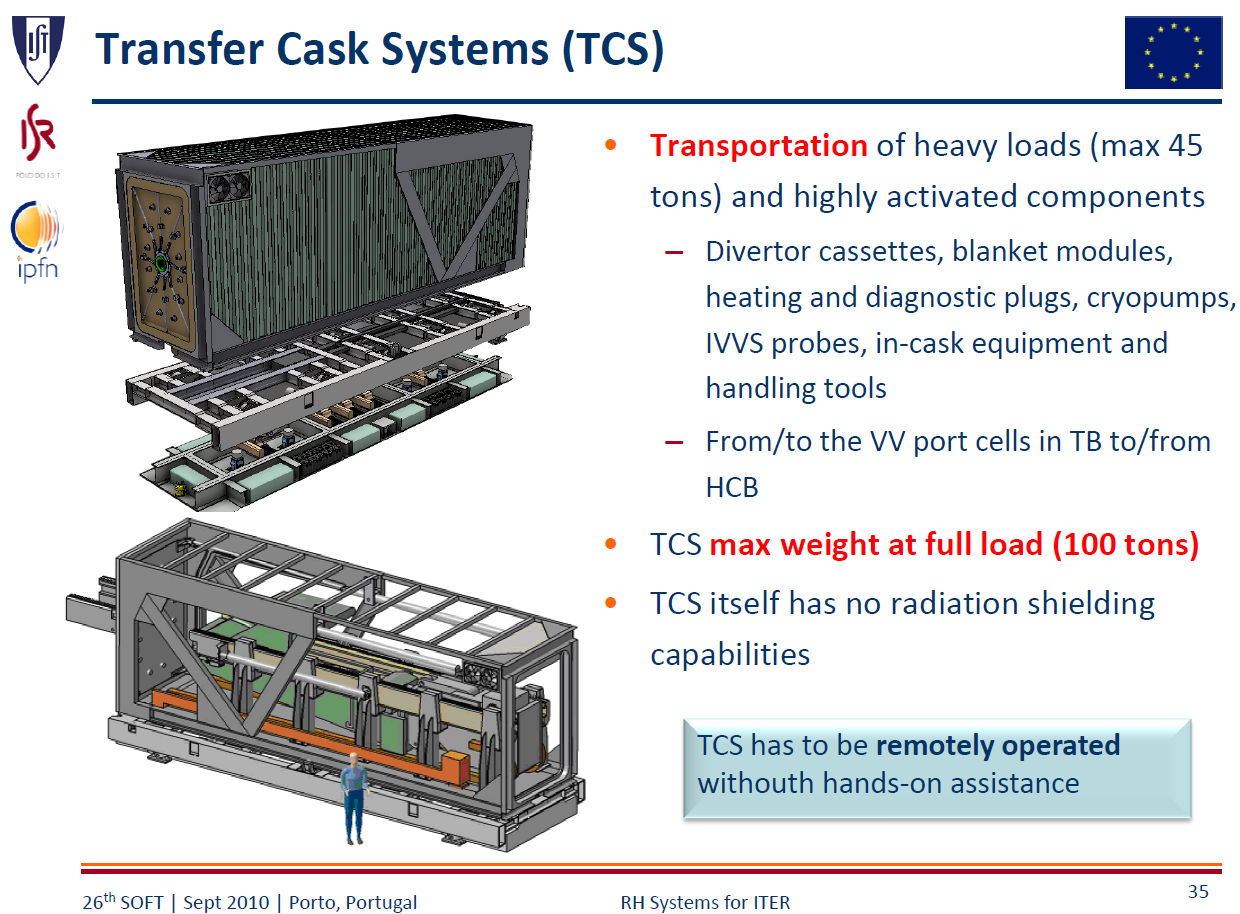
2. Automatic shipping containers (or cask) and port inserts (TCS - transfer cask system). In the vacuum chamber there are 44 passages - ports, on 3 levels. Equipment facing the plasma is organized into special modules - “inserts into ports”. This will allow relatively quickly and modernize the machine and repair the damage without stopping the reactor for months. In addition, transport casks will deliver and deploy all other robotic systems in the reactor.
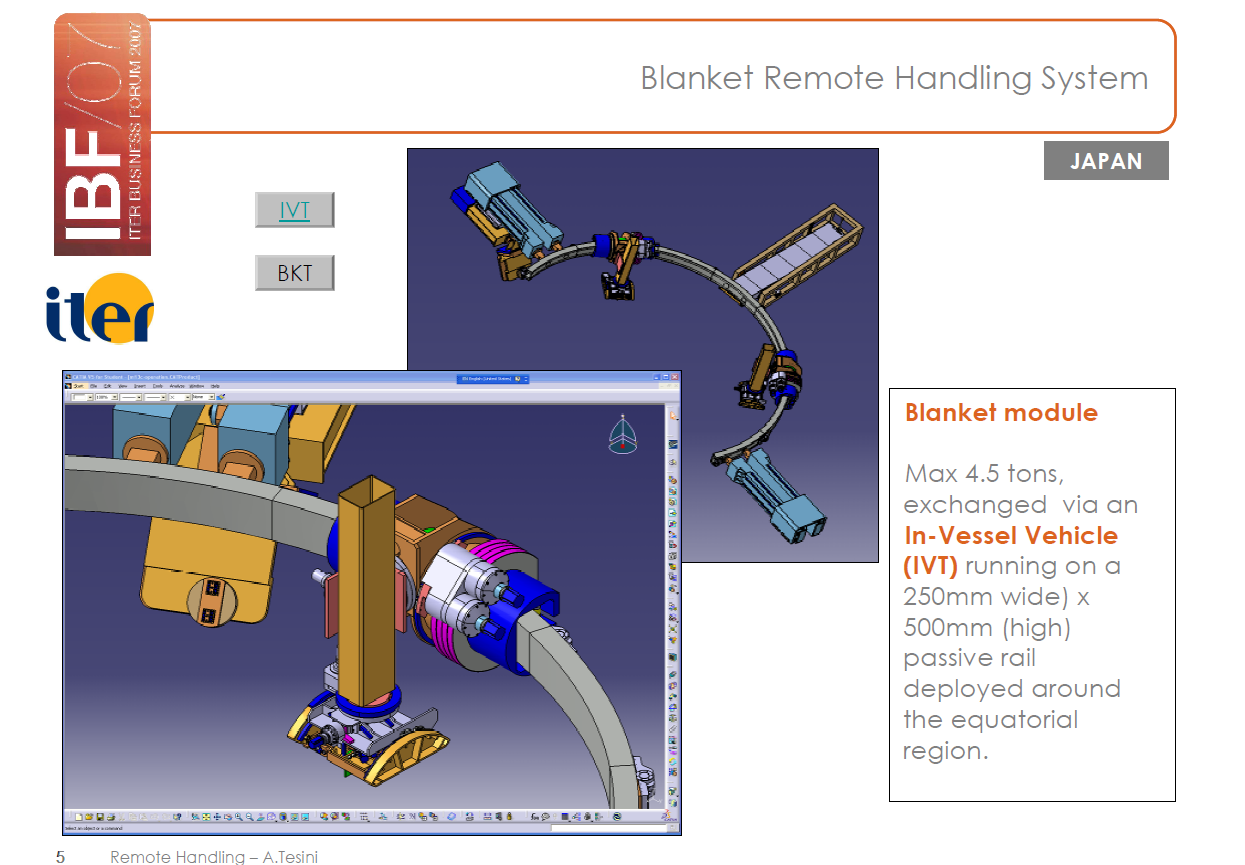
3. System for replacing blanket modules (IVBT - In-Vessel Blanket Transporter). The blanket, which is the screen of the whole machine from the radiation of the plasma, will be replaceable. At least the first wall will gradually evaporate and be damaged by neutron radiation, and it needs to be replaced every 5-10 years.
Deployed through 3 IVBT ports (yellow elements on the gray rail)
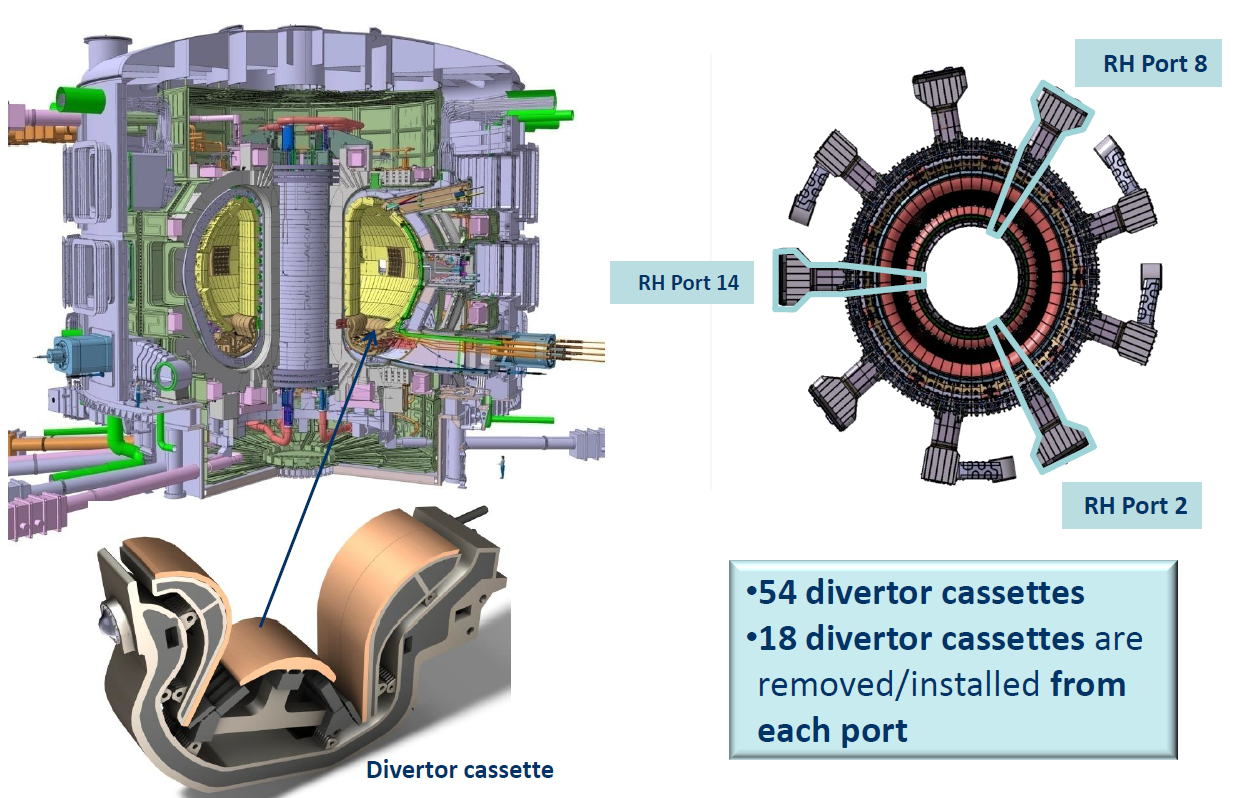
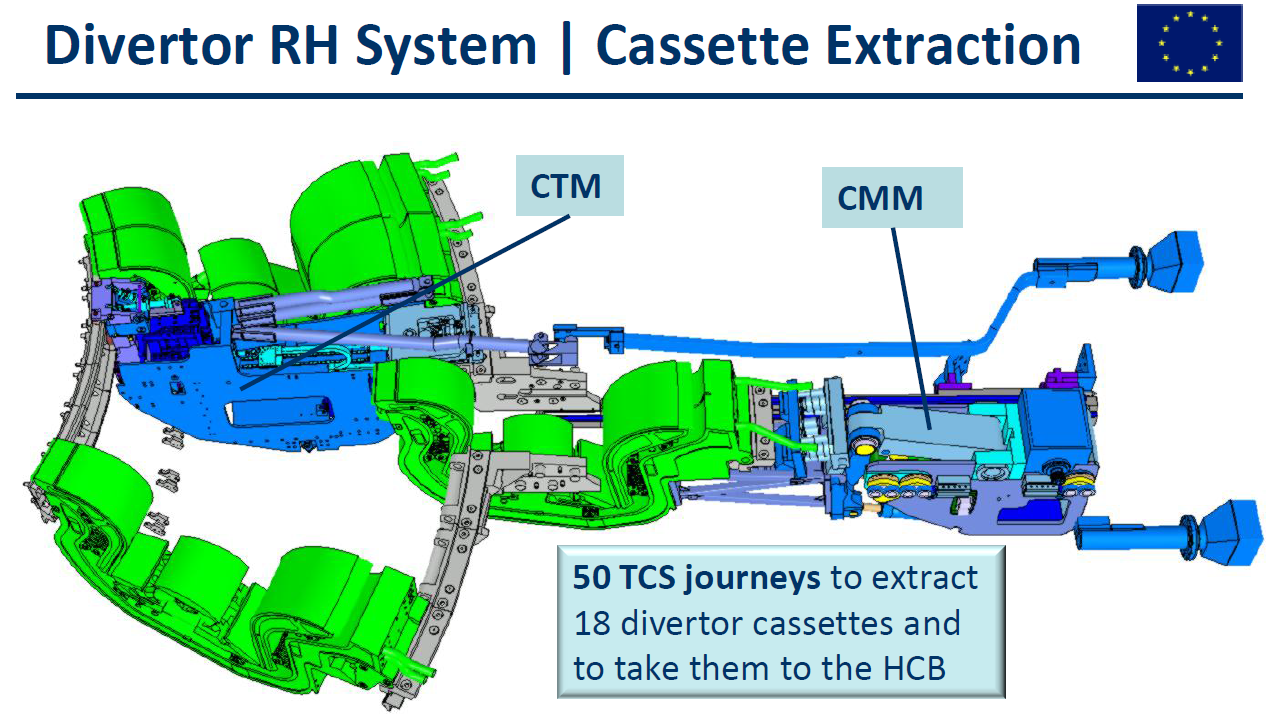
4. Similar in function system replacement modules divertor (DRH - Divertor remote handling). A divertor is a part of the blanket located below, which directly touches the plasma, constantly cooling and withdrawing a part of it. Naturally, its deterioration will be even more serious, and once every 8-10 years all 54 divertor cassettes will be replaced.
5. Multi-Purpose Vacuum Chamber Robot (MPD - Multi-Purpose Deployer). Remotely controlled servicing robotic arm deployed from a shipping container. Its task is to eliminate accidents, such as rupture of tubes, to inspect the elements of the vacuum chamber, etc.
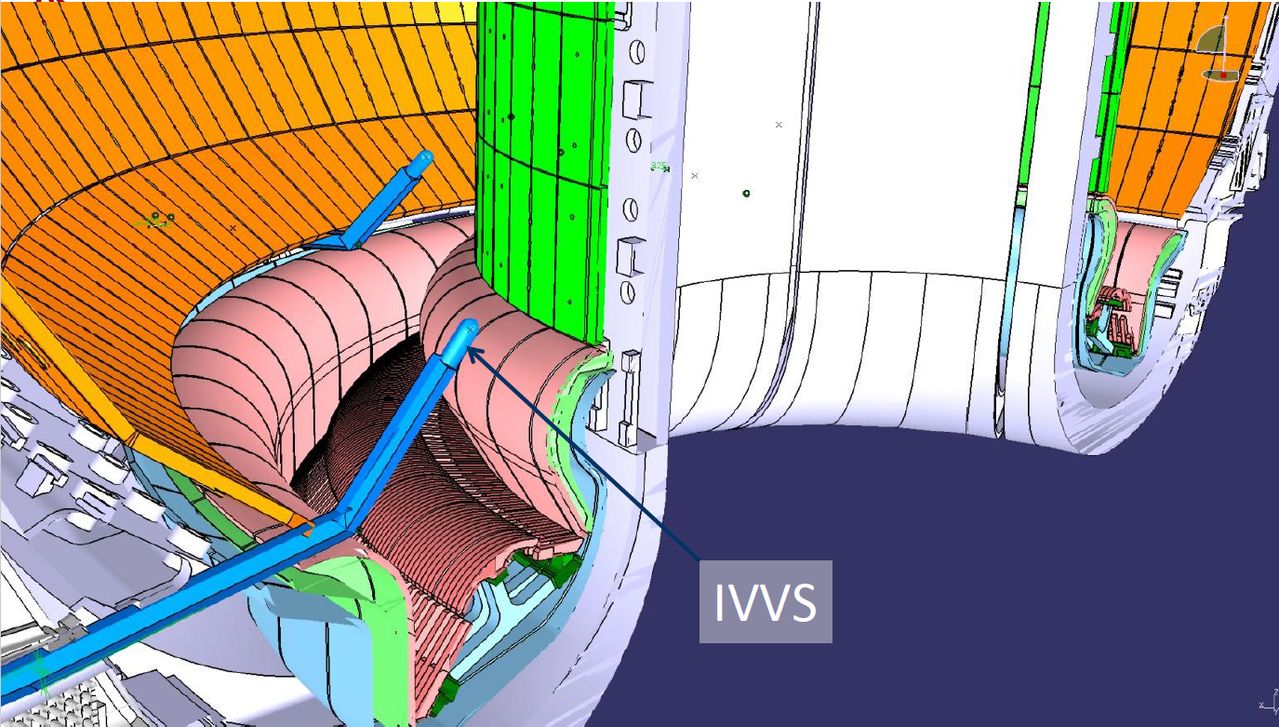
6. Intracameral vision system. (IVVS - In-vessel Viewing System) 6 manipulators with HD cameras and laser scanners, which are based directly in special pockets inside the vacuum chamber for quick inspection.
7. Maintenance system for neutral beam injectors (NBSRH - Neutral beam System Remote Handling). A set of robotic cranes and manipulators for one separate plasma heating system. Unfortunately, these 50 megawatt boosters have a total volume with a vacuum chamber, which means tritium will settle on their walls, and energetic thermonuclear neutrons will fall on their design elements. Hence the need for remote maintenance.
Before proceeding to a more detailed study of all these robots, it is necessary to mention a few problems faced by the developers, which drag the complexity of solutions literally into space.
Firstly, it is clear that all these systems will have to work in conditions of high radiation fields. The second important aspect - the insides of a tokamak - is a high-vacuum environment, which means no lubricants, no hydraulic oil drives. With such restrictions, you need to create mechanisms that will install, remove and move along complex trajectories in narrow spaces large multi-toned blocks of the blanket (up to 4.5 tons) and divertor cassettes (9.5 tons!) With high accuracy and reliability. The most important aspect is the interaction of some robotic systems with others - IVBT will have to be deployed from 3 transport caks, docked to 3 different ports, and the position of the system will be tracked through IVVS. Such tasks on such a scale have not yet been solved by anyone in the world.
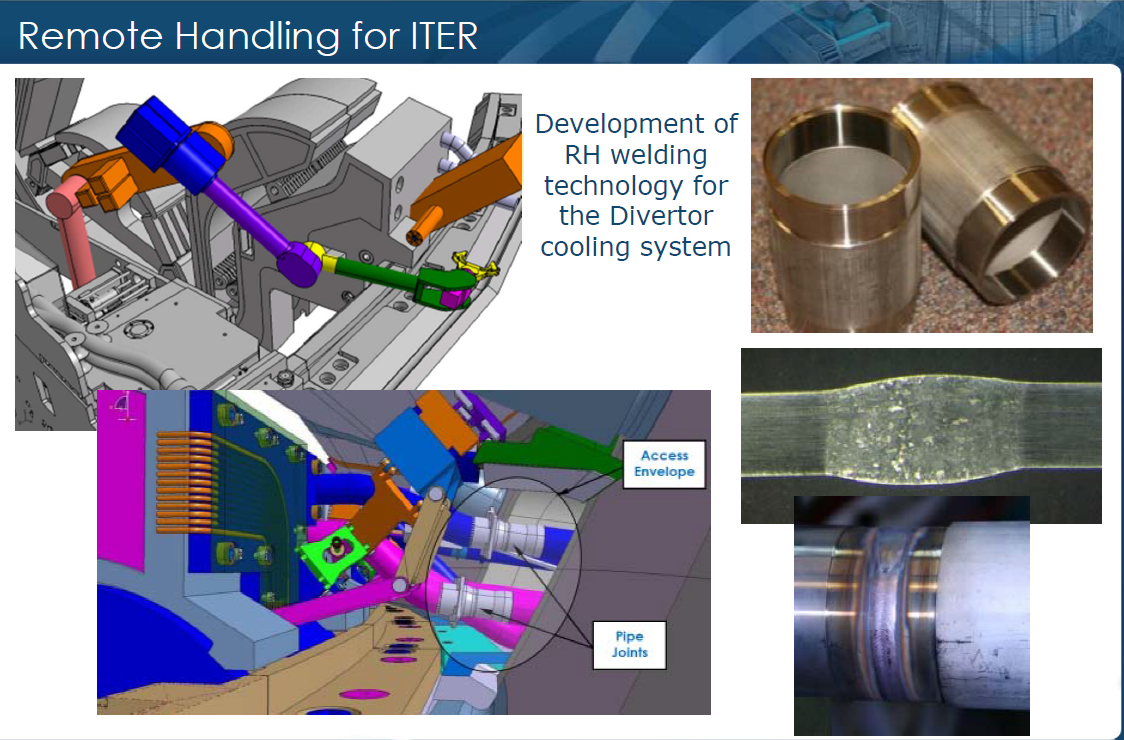
Or, for example, when installing divertor cassettes, you need to be able to cut and weld cooling pipelines using robots.
So let's take a look at the system for details. Let's start with shipping containers.
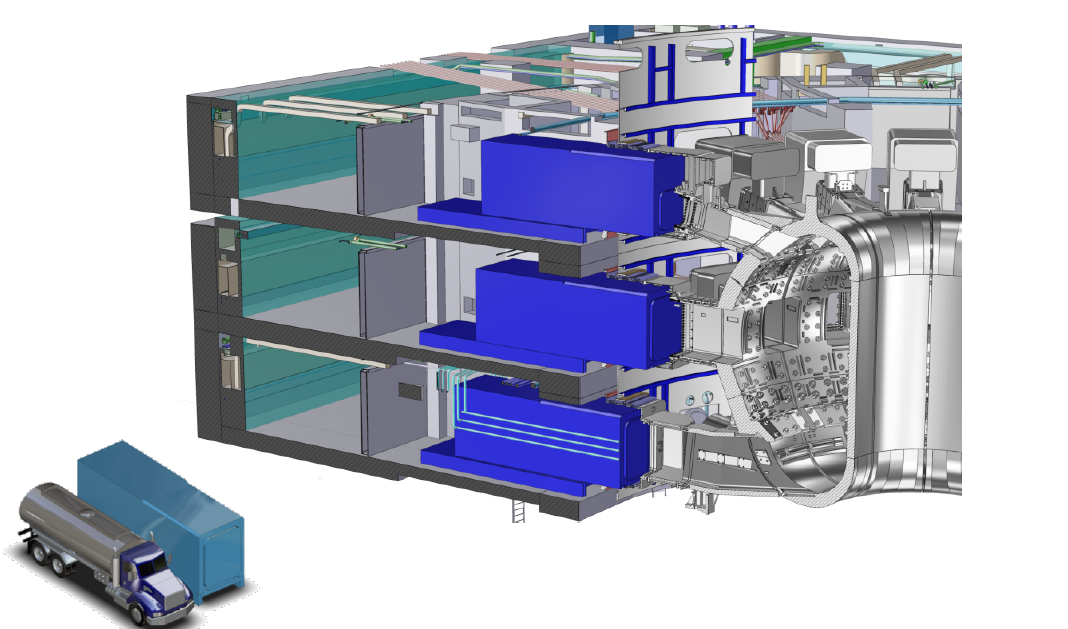
Shipping containers docked at three different levels to the ports of the vacuum chamber.
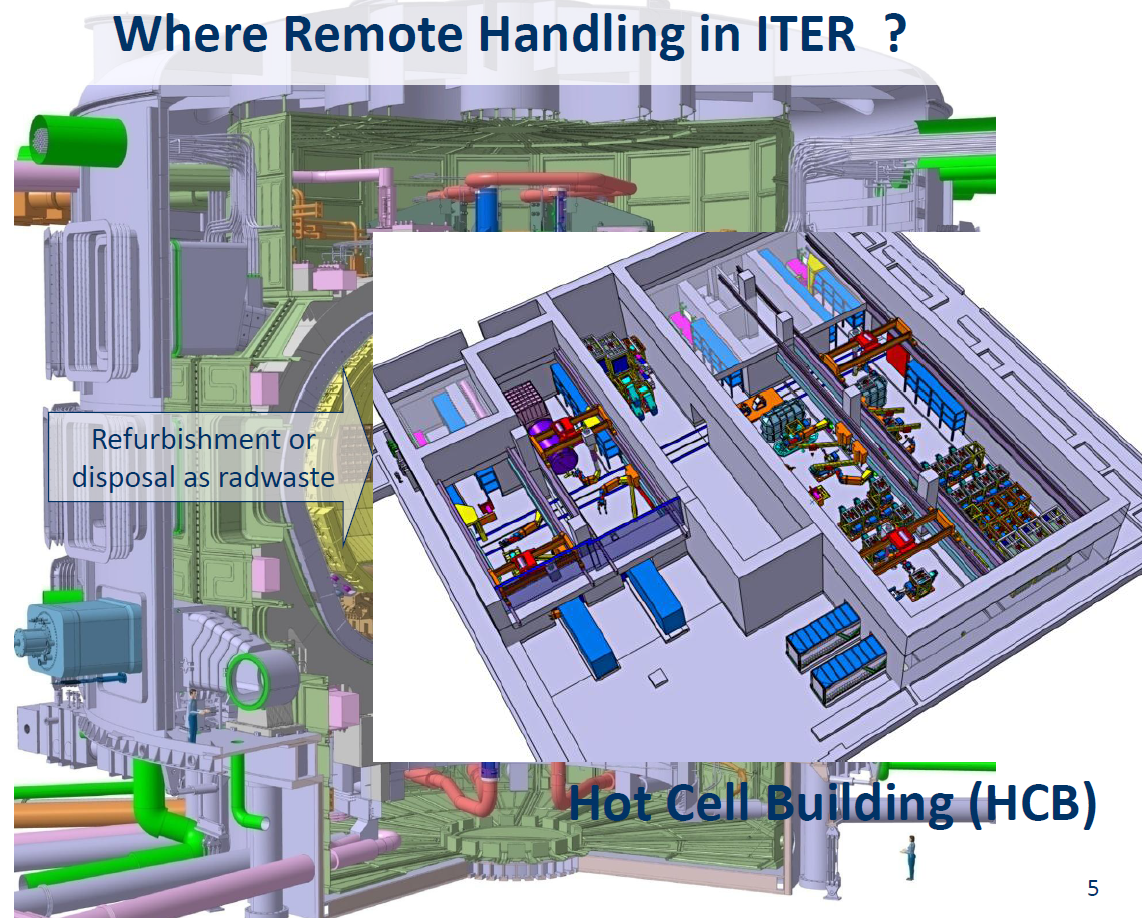
In the ITER complex there will be a building of hot cells, where all the work with radioactive components, materials, etc. will be done. It is directly “docked” to the main building of the tokamak. Between the tokamak ports and the hot chambers, 14 special automatic mechanisms will run, each slightly larger than a 20-foot container. They are designed to carry everything that will be inserted and removed from tokamak ports - scientific equipment modules, plasma heating systems antennas, advanced elements of future thermonuclear reactors, robots for deployment inside a vacuum chamber, finally blanket modules and divertor cassettes.
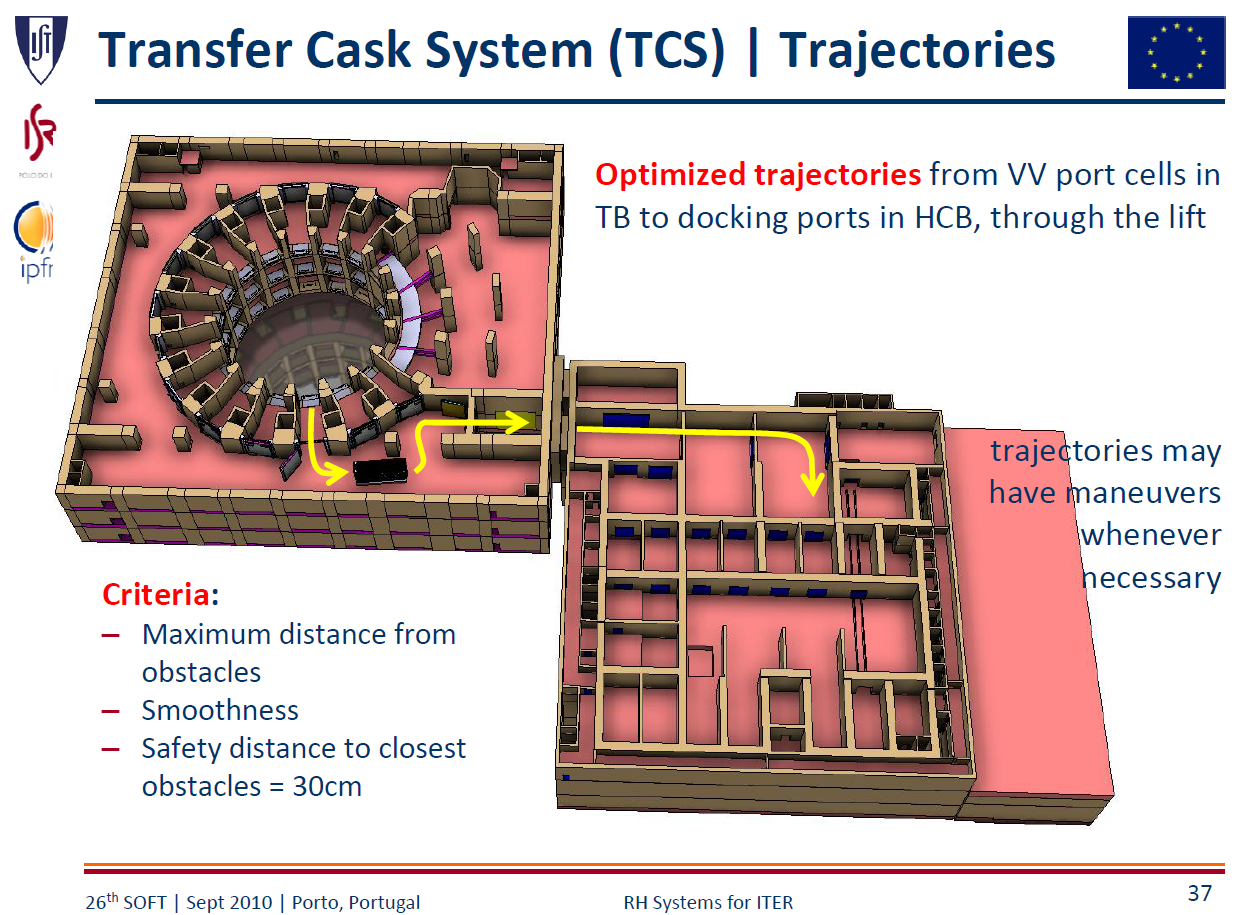
Building plan of tokamak and hot chambers and the trajectory of containers.
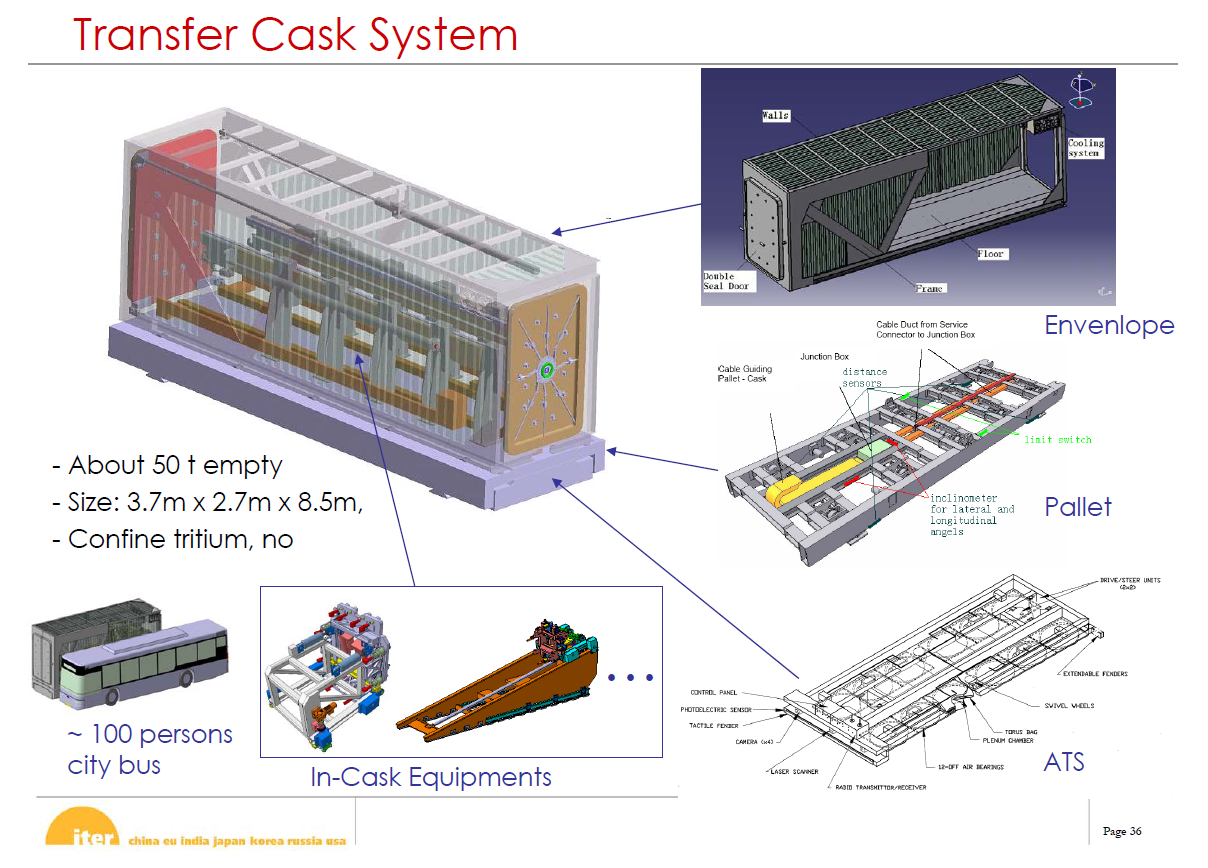
The cargo is taken by docking the container's front interface to the ITER ports and pulling the port inserts from the port. In addition, to many ports, intermediate structures will be docked on the outside, expanding the scope for port insertion equipment. They will also move using this system. By the way, replacing port inserts is not just inserting a cassette. In addition to rather big mass (up to 45 tons!) And accuracy of moving in units of millimeters, it is necessary to be able to cut and weld pipelines, disconnect electrical connectors, etc. Moving cask'and most likely will be on an air cushion, equipped with double doors that would hide when moving radioactive dust inside.
At the moment, the requirements for this system are defined (there are such interesting videos, where the trajectories of these robots inside the ITER building are investigated , and the requirements for their sensors are formulated), but the specific engineering work has not yet been started and the manufacturer has not been selected - so perhaps the appearance of the system and will change. The development and production is the responsibility of the European Union.
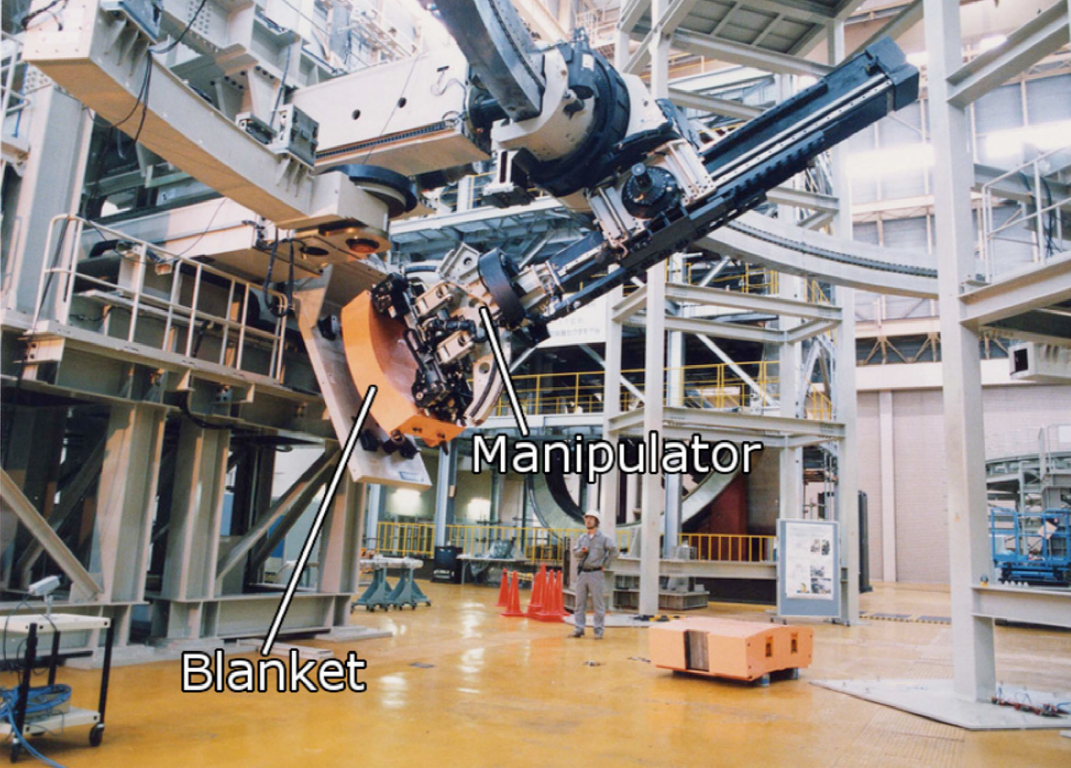
As we remember, the diverter and blanket service systems will be deployed from several such casks. The Japanese IVBT system for servicing the blanket imperceptibly carries the spirit of anime about giant robots, if you look at the process of unfolding this mechanism:
Interestingly, during the deployment of the cask'i make 12 flights with different parts of IVBT.
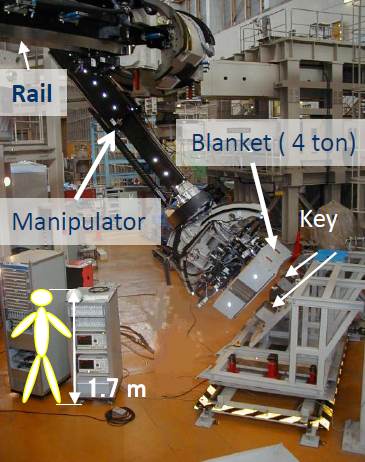
In addition to the puzzling mechanics of the system, it has other difficulties. First of all, these are deformations of the system under the weight of a 4.5 ton steel module of the blanket.
To achieve the accuracy of the final effector of this robot at 2 mm (based on 5 meters!), A combination of virtual reality / structural simulation and technical vision with a resolution of 0.1 mm is used. Virtual reality / structural simulation is the use of the laws of physics in a virtual simulation of the position of the elements of the robot, with the simulation of their deformations in real time. Currently, such a virtual reality, using data from the sensors of the robot mechanics (encoders), has reached an accuracy of 5 mm and 5 degrees in all axes. To further improve the situation, this virtual simulation is corrected by a vision system that focuses on the 3D model of the modules to which the manipulator is brought. This allowed to bring the positioning errors to 0.8 mm and 0.2 degrees.
The final positioning of the blanket on the anchorages will be carried out using force sensors in the manipulator. Interestingly, for this mechanism, the creation of a deployment system — cable winding — turned out to be quite difficult. The total length from cask with cable to the manipulator can reach 40 meters.
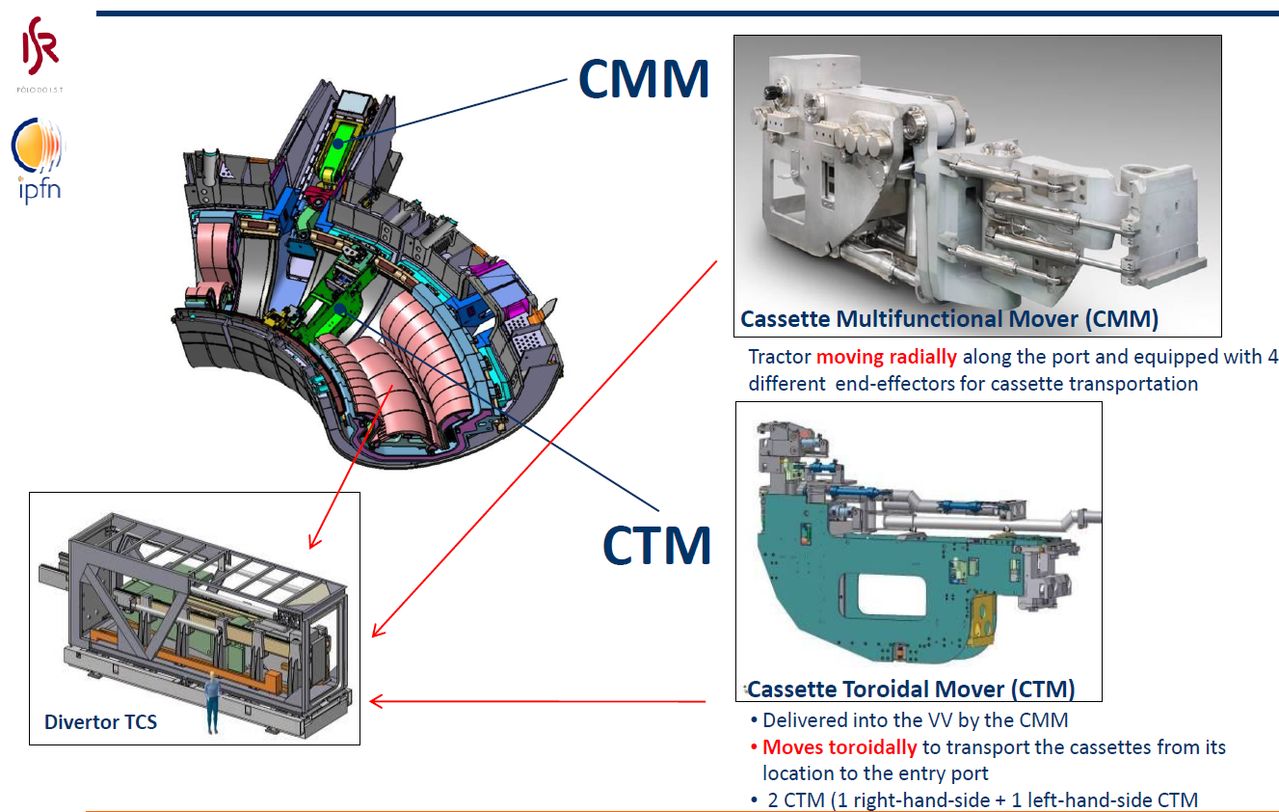
However, if for the Japanese system the key is to ensure accuracy on the complex wall of the double curvature of the vacuum chamber with a range of operations of tens of meters, then the system for replacing divertor cassettes developed at the Finnish University in Tampere is very small gaps in the diverter port in which it is necessary the cassette and the robot body (the system consists of two subunits - Cassette multifunctional mover (CMM), moving the cassettes through the port and Cassette toroidal mover (CTM), which moves the cassettes along the divertor) not more than 10-15 mm.
In the same way, virtual reality with structural simulation is used here. To develop this system, a special mock-up of the tokamak part was built in the VTT center in Finland, at which operations are worked out. Interestingly, to clamp the cassettes in the vacuum chamber housing, to weld the cooling pipes and other minor operations, the CMM / CTM manipulator on water hydraulics is used - which is best compatible with the radiation-vacuum environment of the tokamak, but rather slow . This system is characterized by a large amount of mining at a special test bench, which made it possible to bring a significant part of the equipment, software and operations to readiness for use in ITER.
Smart simulation of the CTM installation of the cassette, starting with the extraction from the cask
And a small video with frames of the system on the test platform
In general, it should be noted that robotic operations of such complexity will not be very fast. For replacing 54 divertor cassettes, a year is allotted, and one and a half to replace the entire blanket. True, a noticeable role in such puffs is played by the periods of freezing-thawing of superconducting magnets - 2 months to move from the state of “plasma operation” to “possible maintenance” and back.
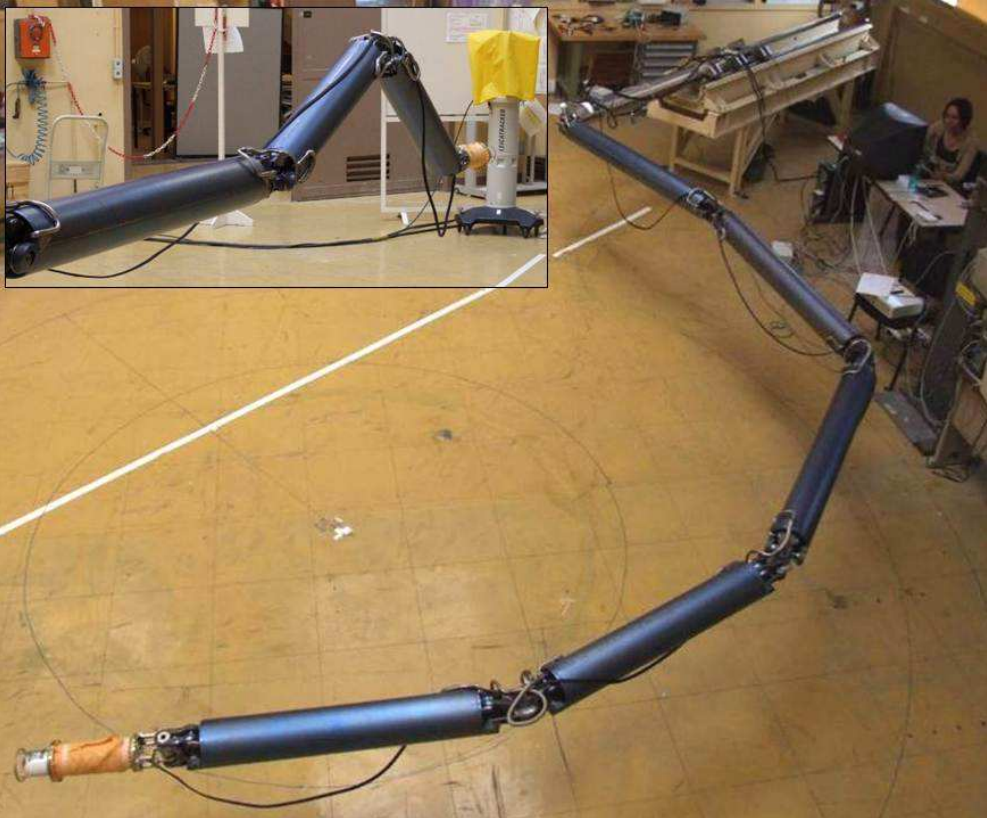
Prototype IVVS Inspection System - AIA Robot
In order not to wait a month for access by the manipulator inside, the French agency CEA develops an AIA inspection robot, capable of operating at temperatures from -50 to 170 C, ultra-high vacuum and with radiation fields up to 50 thousand X-rays per hour. This manipulator carries high-resolution cameras and a laser tracker, and in the future a mass spectrometer to search for even the smallest leaks from numerous cooling pipelines and a laser-induced optical spectrometer to study depositions on the walls of the vacuum chamber.
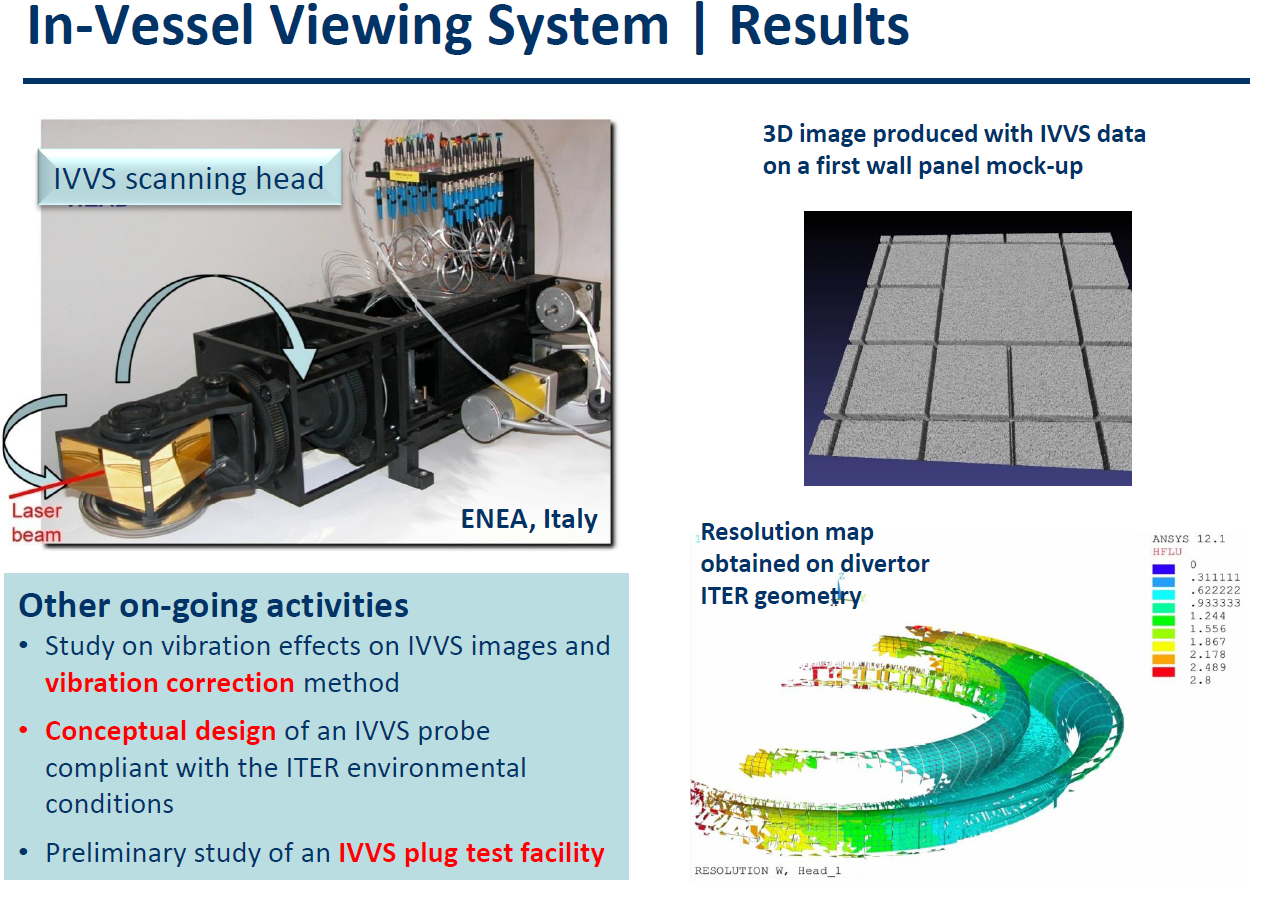
Prototype laser tracker for IVVS
6 such manipulators located in special storages around the perimeter of the vacuum chamber will make up the IVVS internal review system. It can be turned inwards at any time (except during plasma burning :)) for damage inspection. The accuracy of the camera resolution should be no worse than 1 mm at a distance of 4 meters and 3D scanning with an accuracy of 0.165 mm

AIA deployed during tests in the Tore Supra tokamak under high vacuum conditions at a wall temperature of 120 C.
If the inspections carried out with the help of IVVS show the need for repairs, then the MPD remote-controlled robot will come into play.
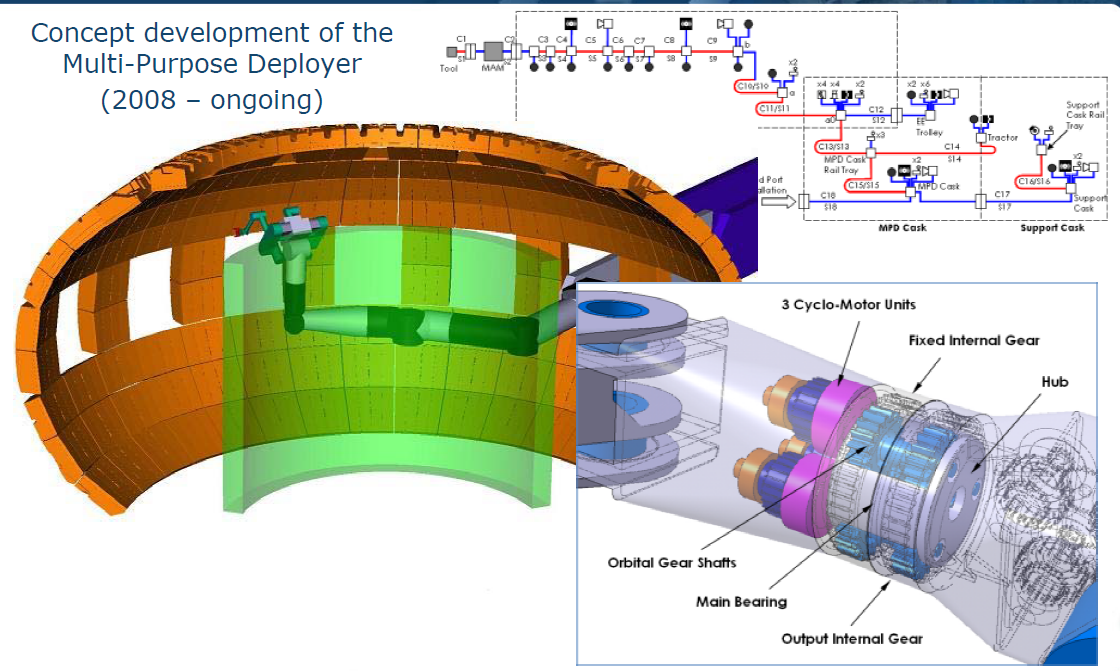
Developed by the English company Oxford Technologies, it is an updated version of the JET tokamak robot. Apart from repairs, its tasks are to set up and calibrate the internal parts of the scientific and engineering equipment of the tokamak, as well as the important task of collecting radioactive dust, which is formed as a result of the influence of thermonuclear plasma on the surface of the vacuum chamber. Another important task of MPD is rescue operations for other robotic systems in the event of their failure.
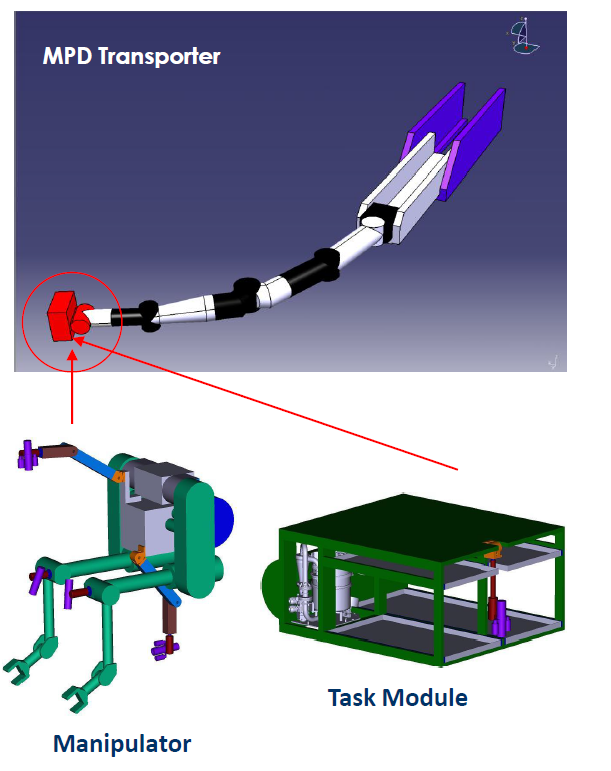
With a manipulator length of 8 meters, the maximum payload should be 2 tons. As in the version of the robot for JET, 2 remote-controlled manipulators with feedback, several cameras and laser radars will be placed on the MPD. Interestingly, a number of “hand-held” tools have already been developed for this robot for cutting-welding pipes, mounting and dismounting various equipment, inspections and research.
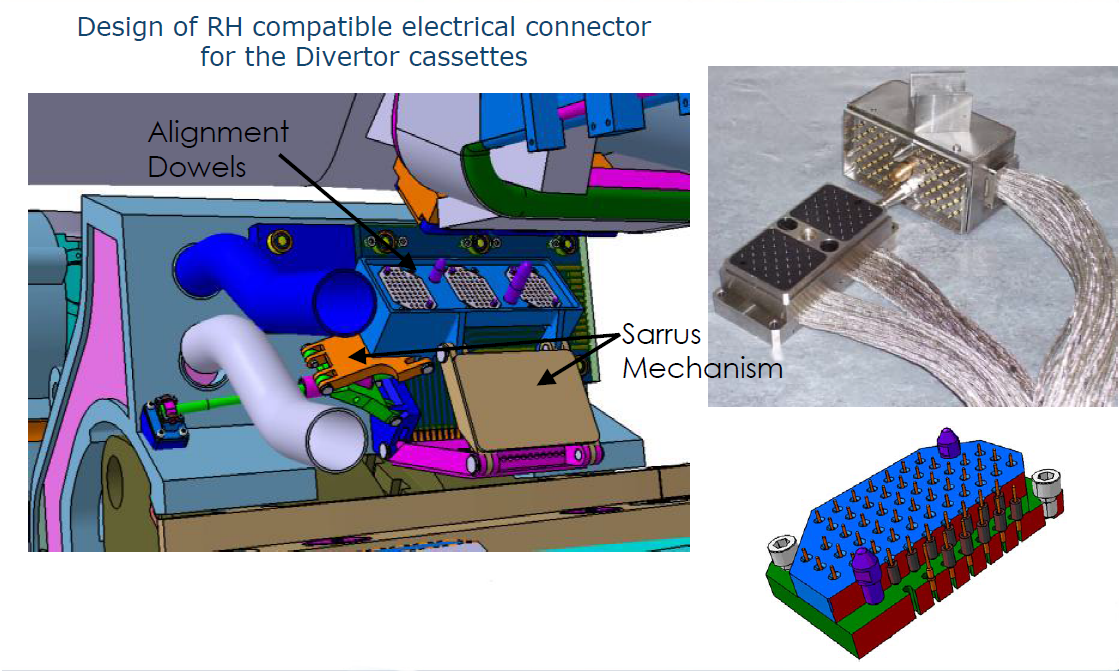
Or, for example, CMM / CTM ready-to-install connectors for divertor cassettes are also developed by Oxford Technoligies
In addition to the vacuum chamber itself, neutral beam injectors also need regular remote maintenance. To do this, the NBI premises (where 2 power and 1 diagnostic NBI will initially be located) will have several MPD-like robots with remote-controlled manipulators, as well as special cranes moving along the monorail system under the ceiling, capable of lifting and replacing the heaviest NBI components.
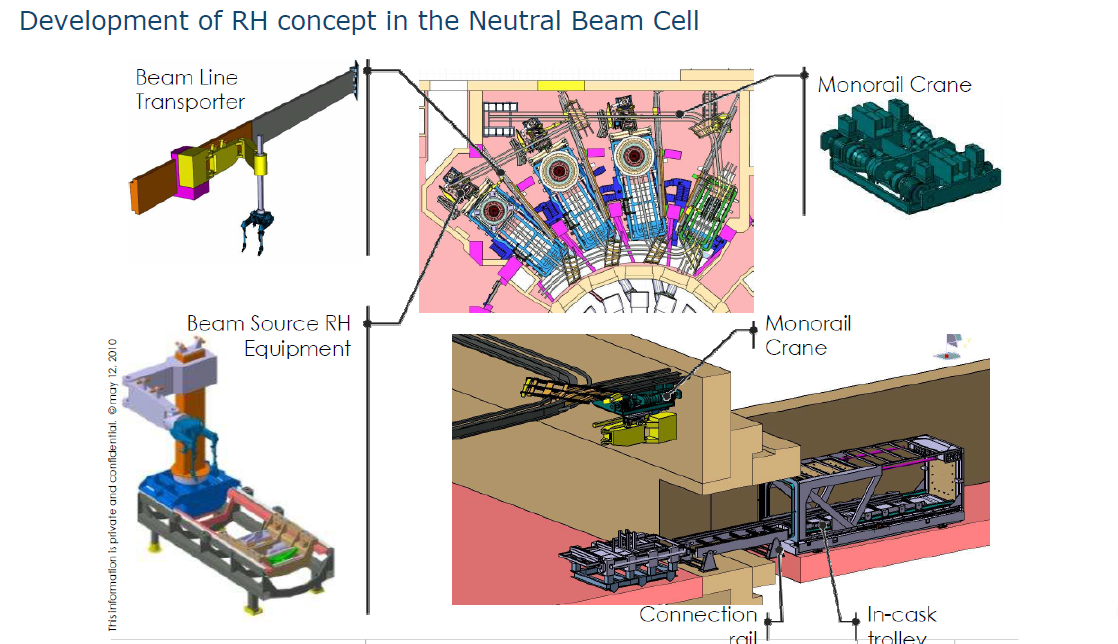
General plan of the NBI robotic system
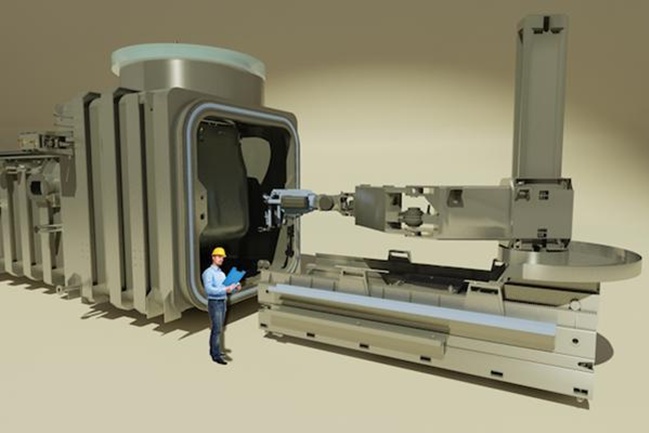
Render of a robot for servicing cesium stoves and radiofrequency neutral-beam injector generators.
Well, in the second part of the article, after a review of the ITER robotic systems, we will talk about how remote maintenance affects the tokamak constructive, ideology and operations of remote-controlled operations of this scale. I will also try to touch on the topic of the transfer of technologies under development to industry not related to fusion reactors.
Robots brew ITER toroidal magnet section
The need for maintenance, repair, modification of this world's largest tokamak by people is impossible due to the high level of radiation that will arise immediately after the first ITER sessions with thermonuclear burning, due to neutron activation, which I wrote about in more detail last time .
')
The dose rate inside the vacuum chamber, in sievert and its dynamics over time.
This means that all the work inside the torus and in the immediate vicinity of the vacuum chamber (in more detail about the vacuum chamber, blanket and divertor , which will continue to appear in the text), as well as in the premises of the neutral beam injectors should be performed by a robotic system, or rather a set of various systems . In addition, after the launch of ITER, the hot cells will be added to the permanent research work - to work with the structural elements extracted from the reactor, to repair, repair and update them. The main problem is precisely that all work with absolutely all equipment that is close to the plasma can be conducted remotely - either in the reactor itself, or by exporting it to hot chambers. It's funny, by the way, that it is dark in tokamak, so the robots have to carry the lighting as well.
So, let's see what will be the most powerful complex of remote maintenance of the ITER thermonuclear reactor. In total, it is divided into 7 systems:
1. The hot cell remote handling system (HCRHS - hot cell remote handling) described above, designed to work with ITER activated elements outside the reactor itself.
Plan one floor of a hot chamber building. Docked shipping containers visible (blue)
2. Automatic shipping containers (or cask) and port inserts (TCS - transfer cask system). In the vacuum chamber there are 44 passages - ports, on 3 levels. Equipment facing the plasma is organized into special modules - “inserts into ports”. This will allow relatively quickly and modernize the machine and repair the damage without stopping the reactor for months. In addition, transport casks will deliver and deploy all other robotic systems in the reactor.
3. System for replacing blanket modules (IVBT - In-Vessel Blanket Transporter). The blanket, which is the screen of the whole machine from the radiation of the plasma, will be replaceable. At least the first wall will gradually evaporate and be damaged by neutron radiation, and it needs to be replaced every 5-10 years.
Deployed through 3 IVBT ports (yellow elements on the gray rail)
4. Similar in function system replacement modules divertor (DRH - Divertor remote handling). A divertor is a part of the blanket located below, which directly touches the plasma, constantly cooling and withdrawing a part of it. Naturally, its deterioration will be even more serious, and once every 8-10 years all 54 divertor cassettes will be replaced.
5. Multi-Purpose Vacuum Chamber Robot (MPD - Multi-Purpose Deployer). Remotely controlled servicing robotic arm deployed from a shipping container. Its task is to eliminate accidents, such as rupture of tubes, to inspect the elements of the vacuum chamber, etc.
6. Intracameral vision system. (IVVS - In-vessel Viewing System) 6 manipulators with HD cameras and laser scanners, which are based directly in special pockets inside the vacuum chamber for quick inspection.
7. Maintenance system for neutral beam injectors (NBSRH - Neutral beam System Remote Handling). A set of robotic cranes and manipulators for one separate plasma heating system. Unfortunately, these 50 megawatt boosters have a total volume with a vacuum chamber, which means tritium will settle on their walls, and energetic thermonuclear neutrons will fall on their design elements. Hence the need for remote maintenance.
Before proceeding to a more detailed study of all these robots, it is necessary to mention a few problems faced by the developers, which drag the complexity of solutions literally into space.
Firstly, it is clear that all these systems will have to work in conditions of high radiation fields. The second important aspect - the insides of a tokamak - is a high-vacuum environment, which means no lubricants, no hydraulic oil drives. With such restrictions, you need to create mechanisms that will install, remove and move along complex trajectories in narrow spaces large multi-toned blocks of the blanket (up to 4.5 tons) and divertor cassettes (9.5 tons!) With high accuracy and reliability. The most important aspect is the interaction of some robotic systems with others - IVBT will have to be deployed from 3 transport caks, docked to 3 different ports, and the position of the system will be tracked through IVVS. Such tasks on such a scale have not yet been solved by anyone in the world.
Or, for example, when installing divertor cassettes, you need to be able to cut and weld cooling pipelines using robots.
So let's take a look at the system for details. Let's start with shipping containers.
Shipping containers docked at three different levels to the ports of the vacuum chamber.
In the ITER complex there will be a building of hot cells, where all the work with radioactive components, materials, etc. will be done. It is directly “docked” to the main building of the tokamak. Between the tokamak ports and the hot chambers, 14 special automatic mechanisms will run, each slightly larger than a 20-foot container. They are designed to carry everything that will be inserted and removed from tokamak ports - scientific equipment modules, plasma heating systems antennas, advanced elements of future thermonuclear reactors, robots for deployment inside a vacuum chamber, finally blanket modules and divertor cassettes.
Building plan of tokamak and hot chambers and the trajectory of containers.
The cargo is taken by docking the container's front interface to the ITER ports and pulling the port inserts from the port. In addition, to many ports, intermediate structures will be docked on the outside, expanding the scope for port insertion equipment. They will also move using this system. By the way, replacing port inserts is not just inserting a cassette. In addition to rather big mass (up to 45 tons!) And accuracy of moving in units of millimeters, it is necessary to be able to cut and weld pipelines, disconnect electrical connectors, etc. Moving cask'and most likely will be on an air cushion, equipped with double doors that would hide when moving radioactive dust inside.
At the moment, the requirements for this system are defined (there are such interesting videos, where the trajectories of these robots inside the ITER building are investigated , and the requirements for their sensors are formulated), but the specific engineering work has not yet been started and the manufacturer has not been selected - so perhaps the appearance of the system and will change. The development and production is the responsibility of the European Union.
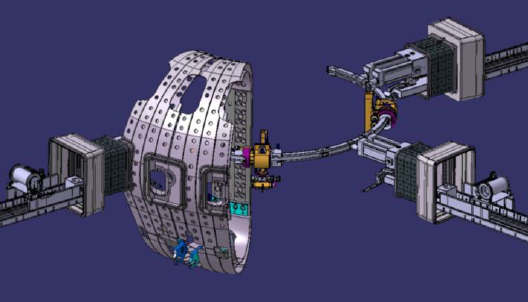
As we remember, the diverter and blanket service systems will be deployed from several such casks. The Japanese IVBT system for servicing the blanket imperceptibly carries the spirit of anime about giant robots, if you look at the process of unfolding this mechanism:
Interestingly, during the deployment of the cask'i make 12 flights with different parts of IVBT.
In addition to the puzzling mechanics of the system, it has other difficulties. First of all, these are deformations of the system under the weight of a 4.5 ton steel module of the blanket.
To achieve the accuracy of the final effector of this robot at 2 mm (based on 5 meters!), A combination of virtual reality / structural simulation and technical vision with a resolution of 0.1 mm is used. Virtual reality / structural simulation is the use of the laws of physics in a virtual simulation of the position of the elements of the robot, with the simulation of their deformations in real time. Currently, such a virtual reality, using data from the sensors of the robot mechanics (encoders), has reached an accuracy of 5 mm and 5 degrees in all axes. To further improve the situation, this virtual simulation is corrected by a vision system that focuses on the 3D model of the modules to which the manipulator is brought. This allowed to bring the positioning errors to 0.8 mm and 0.2 degrees.
The final positioning of the blanket on the anchorages will be carried out using force sensors in the manipulator. Interestingly, for this mechanism, the creation of a deployment system — cable winding — turned out to be quite difficult. The total length from cask with cable to the manipulator can reach 40 meters.
However, if for the Japanese system the key is to ensure accuracy on the complex wall of the double curvature of the vacuum chamber with a range of operations of tens of meters, then the system for replacing divertor cassettes developed at the Finnish University in Tampere is very small gaps in the diverter port in which it is necessary the cassette and the robot body (the system consists of two subunits - Cassette multifunctional mover (CMM), moving the cassettes through the port and Cassette toroidal mover (CTM), which moves the cassettes along the divertor) not more than 10-15 mm.
In the same way, virtual reality with structural simulation is used here. To develop this system, a special mock-up of the tokamak part was built in the VTT center in Finland, at which operations are worked out. Interestingly, to clamp the cassettes in the vacuum chamber housing, to weld the cooling pipes and other minor operations, the CMM / CTM manipulator on water hydraulics is used - which is best compatible with the radiation-vacuum environment of the tokamak, but rather slow . This system is characterized by a large amount of mining at a special test bench, which made it possible to bring a significant part of the equipment, software and operations to readiness for use in ITER.
Smart simulation of the CTM installation of the cassette, starting with the extraction from the cask
And a small video with frames of the system on the test platform
In general, it should be noted that robotic operations of such complexity will not be very fast. For replacing 54 divertor cassettes, a year is allotted, and one and a half to replace the entire blanket. True, a noticeable role in such puffs is played by the periods of freezing-thawing of superconducting magnets - 2 months to move from the state of “plasma operation” to “possible maintenance” and back.
Prototype IVVS Inspection System - AIA Robot
In order not to wait a month for access by the manipulator inside, the French agency CEA develops an AIA inspection robot, capable of operating at temperatures from -50 to 170 C, ultra-high vacuum and with radiation fields up to 50 thousand X-rays per hour. This manipulator carries high-resolution cameras and a laser tracker, and in the future a mass spectrometer to search for even the smallest leaks from numerous cooling pipelines and a laser-induced optical spectrometer to study depositions on the walls of the vacuum chamber.
Prototype laser tracker for IVVS
6 such manipulators located in special storages around the perimeter of the vacuum chamber will make up the IVVS internal review system. It can be turned inwards at any time (except during plasma burning :)) for damage inspection. The accuracy of the camera resolution should be no worse than 1 mm at a distance of 4 meters and 3D scanning with an accuracy of 0.165 mm
AIA deployed during tests in the Tore Supra tokamak under high vacuum conditions at a wall temperature of 120 C.
If the inspections carried out with the help of IVVS show the need for repairs, then the MPD remote-controlled robot will come into play.
Developed by the English company Oxford Technologies, it is an updated version of the JET tokamak robot. Apart from repairs, its tasks are to set up and calibrate the internal parts of the scientific and engineering equipment of the tokamak, as well as the important task of collecting radioactive dust, which is formed as a result of the influence of thermonuclear plasma on the surface of the vacuum chamber. Another important task of MPD is rescue operations for other robotic systems in the event of their failure.
With a manipulator length of 8 meters, the maximum payload should be 2 tons. As in the version of the robot for JET, 2 remote-controlled manipulators with feedback, several cameras and laser radars will be placed on the MPD. Interestingly, a number of “hand-held” tools have already been developed for this robot for cutting-welding pipes, mounting and dismounting various equipment, inspections and research.
Or, for example, CMM / CTM ready-to-install connectors for divertor cassettes are also developed by Oxford Technoligies
In addition to the vacuum chamber itself, neutral beam injectors also need regular remote maintenance. To do this, the NBI premises (where 2 power and 1 diagnostic NBI will initially be located) will have several MPD-like robots with remote-controlled manipulators, as well as special cranes moving along the monorail system under the ceiling, capable of lifting and replacing the heaviest NBI components.
General plan of the NBI robotic system
Render of a robot for servicing cesium stoves and radiofrequency neutral-beam injector generators.
Well, in the second part of the article, after a review of the ITER robotic systems, we will talk about how remote maintenance affects the tokamak constructive, ideology and operations of remote-controlled operations of this scale. I will also try to touch on the topic of the transfer of technologies under development to industry not related to fusion reactors.
Source: https://habr.com/ru/post/366707/
All Articles