The first "toffee" in Moscow: OpenSourсe quadcopter IRIS + with the function "Follow Me"
Last weekend at the Robotics Expo, the guys from CopterTime.ru showed me the first open-source quadrocopter in Moscow, IRIS +, from 3DRobotics.
The 3DR IRIS + quadcopter is an excellent drone fortracking your wife taking photos and videos from the air. The quadcopter can be controlled in real time, either by pre-setting the program for the autopilot (point by point, or “follow the white rabbit by me”)

52.000 rubles, OpenSource software, 16 minutes of flight, 400 grams of payload, “Follow me” function, automatic mission planning
')

“Follow me” is a technology that allows you to follow an object, turning a quadrocopter into a tracking camera. IRIS + can monitor any Android device with GPS. Not only the quadcopter itself will follow you, but the controlled suspension will keep you in the center of the frame.
Under the cut there is a bit of information about the brilliant writer / entrepreneur-visionary Chris Anderson (founder of 3DRobotics), pictures of the general appearance of the IRIS + drone, pictures of how we unscrewed the drone and then made a test flight. (As well as photos of children in light green suits ofpavers and Richard Branson)

I rummaged around a bit and found that the founder of 3DRobotics is quite an outstanding guy (ex-editor of Wired and The Economist). As I understand it, Chris Anderson (not to be confused with Chris Anderson , who was curated by TED) became widely known when he published the very fundamental book Long Tail (about which I first heard in 2009 from Russian General Google Vladimir Dolgov )
TED talk about “Long Tail”
A little later, Chris wrote in the same Wired article "Atoms Are the New Bits" which is translated into Habré in 5 parts ( 1 , 2 , 3 , 4 , 5 )
Also Chris is the creator of the GeekDad.com fathers-geeks community

and self-made drones communities DIYdrones.com

Well, the main activity - drones ( 3DRobotics ):





The old console, Turnigy 9x, is used as a platform. But he was finalized. Standard firmware replaced by
custom 9XR, which allows for deeper settings, normally assign switches and supporting telemetry output. FRSKY DJT is installed as a transmission module with telemetry, which is inserted inside the console and is displayed on the display. It is very convenient that the stickers on the console itself are altered, the functions of the switches are signed.
 Using the free app DroidPlanner, IRIS + users can compile flight tasks simply by drawing a mission on any Android tablet or smartphone. This allows you to fully autonomous flights with an unlimited number of points.
Using the free app DroidPlanner, IRIS + users can compile flight tasks simply by drawing a mission on any Android tablet or smartphone. This allows you to fully autonomous flights with an unlimited number of points.
Flight safety - IRIS + can land on its own when the batteries are discharged or return to the take-off point if the set distance limit is reached or the battery is running out of power.

Initially, Toffee is sharpened under the GoPro camera, even a mount is available for it and you can purchase an additional stabilization gimbal.
The flight controller ArduPilot is a complete solution of UAV (UAV Unmanned Flying Apparatus), which allows, in addition to radio-controlled remote piloting, automatic control via a previously created route, i.e. flight point by point, and also has the possibility of two-way transmission of telemetry data from the board to the ground station (phone, tablet, laptop, DIY) and logging to the built-in memory.
APM is developed by the DIY Drones community and is based on an open-source project that allows you to turn any device into a standalone tool and effectively use it not only for entertainment purposes, but also for the implementation of professional projects.

APM: Copter

APM Planner 2.0

Branson thinks how to make cosmic drones from the “sources” of 3D Robotics
PS
The 3DR IRIS + quadcopter is an excellent drone for
52.000 rubles, OpenSource software, 16 minutes of flight, 400 grams of payload, “Follow me” function, automatic mission planning
')
“Follow me” is a technology that allows you to follow an object, turning a quadrocopter into a tracking camera. IRIS + can monitor any Android device with GPS. Not only the quadcopter itself will follow you, but the controlled suspension will keep you in the center of the frame.
proof
Under the cut there is a bit of information about the brilliant writer / entrepreneur-visionary Chris Anderson (founder of 3DRobotics), pictures of the general appearance of the IRIS + drone, pictures of how we unscrewed the drone and then made a test flight. (As well as photos of children in light green suits of
About the founder:
I rummaged around a bit and found that the founder of 3DRobotics is quite an outstanding guy (ex-editor of Wired and The Economist). As I understand it, Chris Anderson (not to be confused with Chris Anderson , who was curated by TED) became widely known when he published the very fundamental book Long Tail (about which I first heard in 2009 from Russian General Google Vladimir Dolgov )
TED talk about “Long Tail”
A little later, Chris wrote in the same Wired article "Atoms Are the New Bits" which is translated into Habré in 5 parts ( 1 , 2 , 3 , 4 , 5 )
Also Chris is the creator of the GeekDad.com fathers-geeks community
and self-made drones communities DIYdrones.com
Well, the main activity - drones ( 3DRobotics ):
IRIS +
- 400 g payload
- Integrated diodes on all beams for easy orientation
- Remote control with telemetry on the screen
- Self-retracting propellers
- Ready to fly right out of the box, just install the propellers, charge the battery and the quadcopter is ready to fly in manual mode using the built-in controller or offline flight using a MAC, Windows PC or Android device.
Big pictures from all sides



IRIS + equipment:
* FPV kit, camera mount and camera not included.
The guy explains to Americans how to collect "toffee"
(See what a cool green board in the background!)
It is required to fasten the legs (if necessary, the long ones), charge the battery, fasten the propellers, install the software on the android phone or tablet, and some dances with a tambourine to calibrate the compass.
- Ready to fly IRIS +;
- Travel battery and charger;
- Control panel and ground station;
- Chassis kit;
- Set of tools;
- Instruction and preflight "checklist";
* FPV kit, camera mount and camera not included.
The guy explains to Americans how to collect "toffee"
(See what a cool green board in the background!)
It is required to fasten the legs (if necessary, the long ones), charge the battery, fasten the propellers, install the software on the android phone or tablet, and some dances with a tambourine to calibrate the compass.
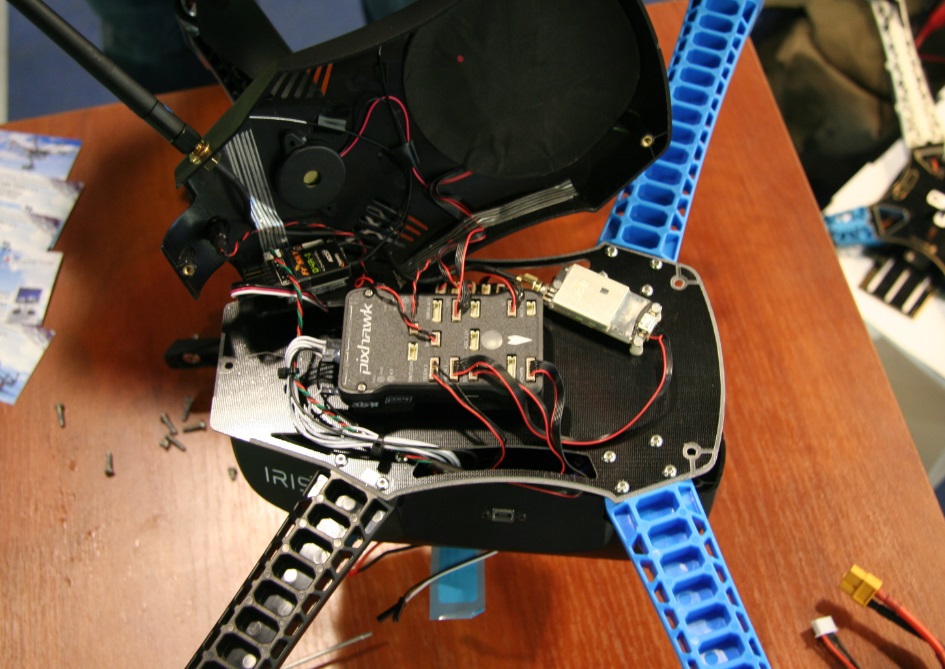
How we parsed it at the exhibition
Under the hood: speed controllers (ESC) in combined on one board.
Under the hood on the other side. Pixhawk (an open and freely developed high-end autopilot project that is used in the hobby, academic and professional community (under a BSD license) at low cost and high availability) is an advanced PX4 autopilot system with open source hardware and 3D Robotics. It has an advanced processor and sensors from ST Microelectronics and a real-time operating system NuttX. Pixhawk has integrated multi-threading, a Unix / Linux-like programming environment, completely new autopilot functions, such as Lua Scripting missions and flight behaviors, and a special PX4 driver layer providing tight time in all processes.
Pixhawk is a high-performance autopilot in one module, suitable for installation in the wing, quadrocopter, helicopter, cars, boats and any other robotic platform that can move. Autopilot is positioned as the highest class of amateur, research and industry needs and is an all-in-one module combining the PX4FMU and the PX4IO.
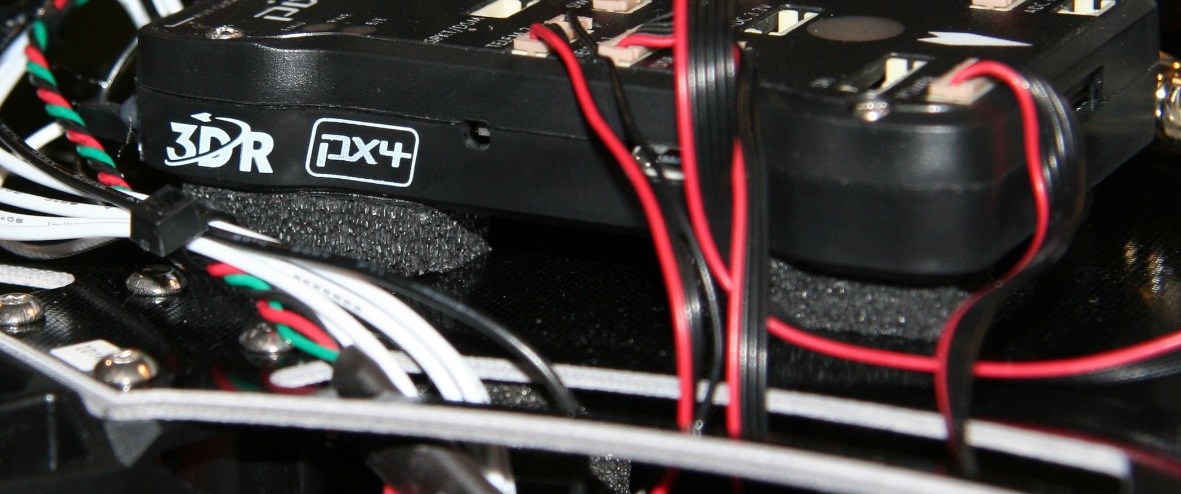
To reduce vibration, PIXHAWK is fixed on foam strips.
===============

(photo from the official site)
Very quiet and low power motors. Good balancing. An interesting feature is that the motor is closed on all sides, that is, it is inside the beam and is protected from external influences such as a fall. Motors have a non-standard mount for propellers - the right and left threads are implemented on both the phantom, that is, the propellers are self-retracting, but the shaft diameter is different, so the propellers will not work from the phantom

Propellers and telemetry
The old Turnigy 9x console is used as a platform. But he was finalized. Standard firmware replaced by
custom 9XR, which allows for deeper settings, normally assign switches and supporting telemetry output. FRSKY DJT is installed as a transmission module with telemetry, which is inserted inside the console and is displayed on the display. It is very convenient that the stickers on the console itself are altered, the functions of the switches are signed.

Lay a route around the exhibition pavilion in Sokolniki Park

Antenna antenna and shielding. Under this label is a GPS module - very sensitive to electromagnetic waves, which are taken from the power wires of the regulators. To reduce the impact on GPS, there are 2 options - raise this module as high as possible on the rack - standard for self-assembled devices, but in this case it becomes much less compact and it is very easy to break when it falls, besides, it is often necessary to introduce corrections for its position Option number two - put it inside the case, as here or on the "phantom", but in this case, screening is required. the better the shielding, the less interference with GPS, the better the hold, the better the flight through the points and the greater the chances of returning home altogether in case of loss of control
The battery lasts for 16 (22) minutes of flight (flight time depends on the load, wind, altitude, temperature, humidity, flight style and pilot skills)

Disclaimer
Under the hood: speed controllers (ESC) in combined on one board.
Under the hood on the other side. Pixhawk (an open and freely developed high-end autopilot project that is used in the hobby, academic and professional community (under a BSD license) at low cost and high availability) is an advanced PX4 autopilot system with open source hardware and 3D Robotics. It has an advanced processor and sensors from ST Microelectronics and a real-time operating system NuttX. Pixhawk has integrated multi-threading, a Unix / Linux-like programming environment, completely new autopilot functions, such as Lua Scripting missions and flight behaviors, and a special PX4 driver layer providing tight time in all processes.
Pixhawk is a high-performance autopilot in one module, suitable for installation in the wing, quadrocopter, helicopter, cars, boats and any other robotic platform that can move. Autopilot is positioned as the highest class of amateur, research and industry needs and is an all-in-one module combining the PX4FMU and the PX4IO.
Main characteristics:
- 168MHz / 252MIPS Cortex-M4F
- 14 PWM / Servo Outputs (8 with fail over and manual override, 6 auxiliary, high power)
- Abundant connectivity options for optional peripherals (UART, I2C, CAN)
- Integrated backup system for recovery in flight and manual control with a dedicated processor and autonomous power source (in the current version of the 2.4.3 board there is no backup battery)
- Redundant power inputs and auto transition
- External safety switch
- Multi-color LED - the main visual indicator
- Powerful, multi-tone piezo audio indicator
- MicroSD card for high frequency registration over a long period of time
To reduce vibration, PIXHAWK is fixed on foam strips.
===============
(photo from the official site)
Very quiet and low power motors. Good balancing. An interesting feature is that the motor is closed on all sides, that is, it is inside the beam and is protected from external influences such as a fall. Motors have a non-standard mount for propellers - the right and left threads are implemented on both the phantom, that is, the propellers are self-retracting, but the shaft diameter is different, so the propellers will not work from the phantom
Propellers and telemetry
The old Turnigy 9x console is used as a platform. But he was finalized. Standard firmware replaced by
custom 9XR, which allows for deeper settings, normally assign switches and supporting telemetry output. FRSKY DJT is installed as a transmission module with telemetry, which is inserted inside the console and is displayed on the display. It is very convenient that the stickers on the console itself are altered, the functions of the switches are signed.
Lay a route around the exhibition pavilion in Sokolniki Park
Antenna antenna and shielding. Under this label is a GPS module - very sensitive to electromagnetic waves, which are taken from the power wires of the regulators. To reduce the impact on GPS, there are 2 options - raise this module as high as possible on the rack - standard for self-assembled devices, but in this case it becomes much less compact and it is very easy to break when it falls, besides, it is often necessary to introduce corrections for its position Option number two - put it inside the case, as here or on the "phantom", but in this case, screening is required. the better the shielding, the less interference with GPS, the better the hold, the better the flight through the points and the greater the chances of returning home altogether in case of loss of control
The battery lasts for 16 (22) minutes of flight (flight time depends on the load, wind, altitude, temperature, humidity, flight style and pilot skills)
Disclaimer
Test flight in Moscow
The old console, Turnigy 9x, is used as a platform. But he was finalized. Standard firmware replaced by
custom 9XR, which allows for deeper settings, normally assign switches and supporting telemetry output. FRSKY DJT is installed as a transmission module with telemetry, which is inserted inside the console and is displayed on the display. It is very convenient that the stickers on the console itself are altered, the functions of the switches are signed.
more pictures



Automatic mission planning
Using the free app DroidPlanner, IRIS + users can compile flight tasks simply by drawing a mission on any Android tablet or smartphone. This allows you to fully autonomous flights with an unlimited number of points.Flight safety - IRIS + can land on its own when the batteries are discharged or return to the take-off point if the set distance limit is reached or the battery is running out of power.
GoPro
Initially, Toffee is sharpened under the GoPro camera, even a mount is available for it and you can purchase an additional stabilization gimbal.
Free and open source software
The flight controller ArduPilot is a complete solution of UAV (UAV Unmanned Flying Apparatus), which allows, in addition to radio-controlled remote piloting, automatic control via a previously created route, i.e. flight point by point, and also has the possibility of two-way transmission of telemetry data from the board to the ground station (phone, tablet, laptop, DIY) and logging to the built-in memory.
APM is developed by the DIY Drones community and is based on an open-source project that allows you to turn any device into a standalone tool and effectively use it not only for entertainment purposes, but also for the implementation of professional projects.
APM: Copter
APM Planner 2.0
Autopilot comparison chart
Branson thinks how to make cosmic drones from the “sources” of 3D Robotics
PS
Photos of children in pavers suits
Make LEGO robots

Play chess with the help of an industrial delta robot

Single "tank"
Make LEGO robots
Play chess with the help of an industrial delta robot
Single "tank"
Source: https://habr.com/ru/post/363663/
All Articles