First steps with STM32 and mikroC compiler for ARM architecture - Part 1
Back in my student years I had to very closely generalize with microcontrollers, then they were 8-bit 8051 and AVR. Now, wanting to return to this lesson, turned his eyes on a very wide family of controllers STM32. Much has been written about them in the open spaces of the Network; nevertheless, I expressed a desire to write a short series of articles on working with STMs. Acquaintance with them, I would like to start, as they say, with a full 0. For experiments, I purchased a simple and cheap ($ 3) Maple Mini debug board. The STM32F103CB controller used in it has a very impressive bunch of possibilities. (especially in comparison with decisions in the price category). Details can be read online, and of course, in the datasheet. . I did not immediately like the native Arduin-like development environment (taste and color, as they say ...). Out of the abundance of diverse development environments, I focused my eyes on mikroelektronika's mikroC for ARM. Once I came across their compilers (for 8081), I really liked it. Although not without jambs, but decided to try.
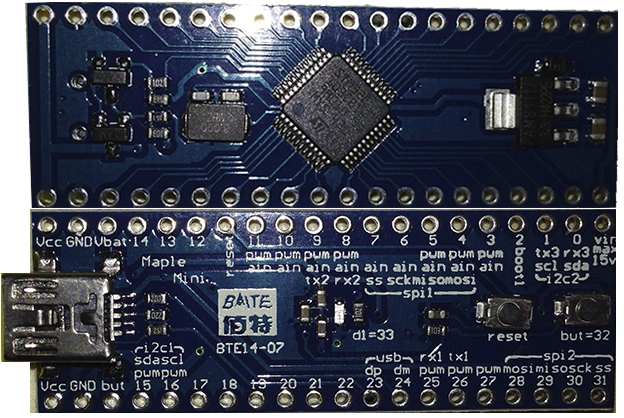
The board has this form, everything is very simple and concise:
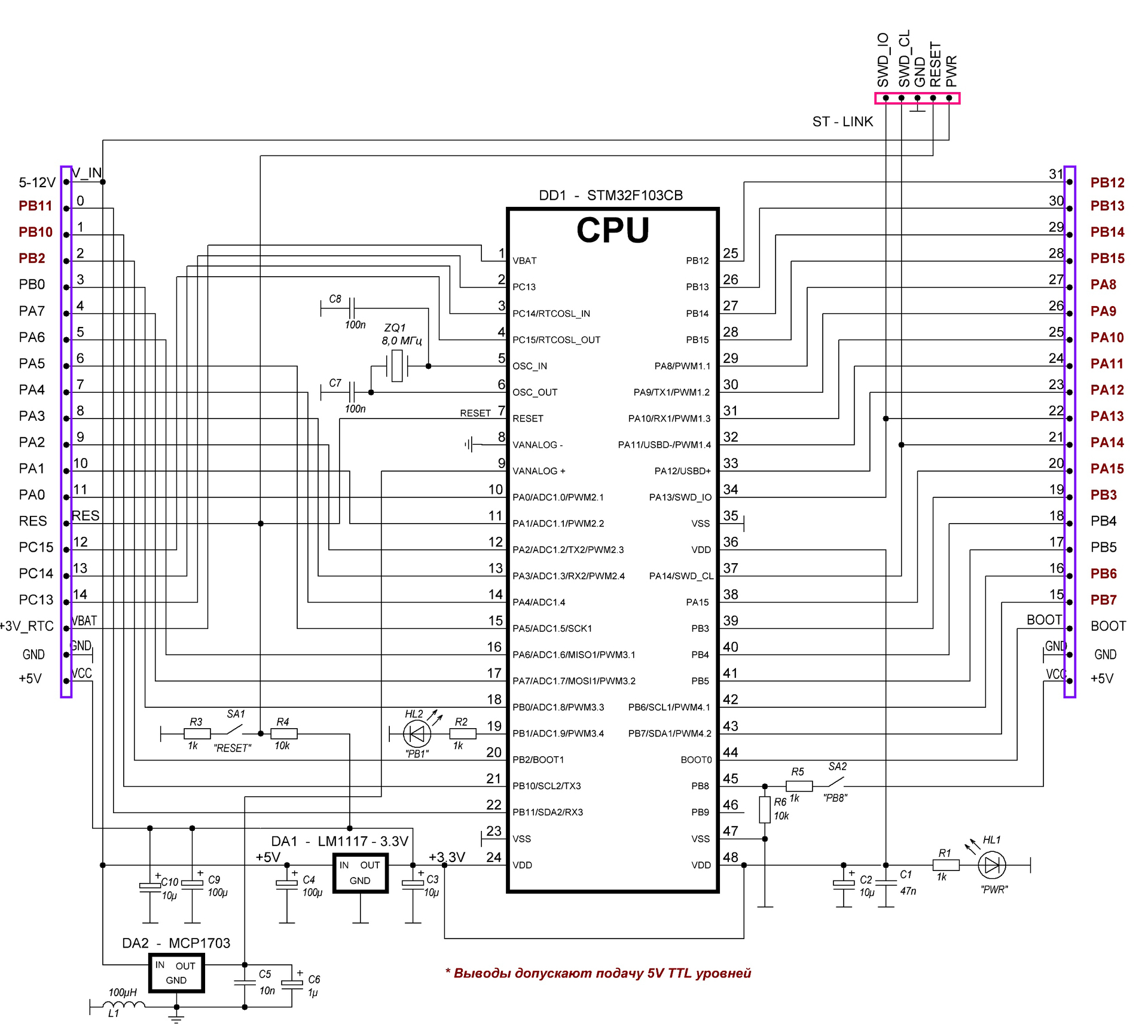
The basic scheme of the board is also simple, but everything that is most needed here is:
The programmer selected the Chinese clone ST-LINK2 ($ 3), nevertheless it works fine with the mikro

Link to the demo version of mikroC . Demo version limitation: maximum 4KB of binary code. Not a lot, but quite enough for familiarization. There should be no problems with installing the application, the only thing you need to do is to install the driver on ST-LINK2 before running the mikroC installer.
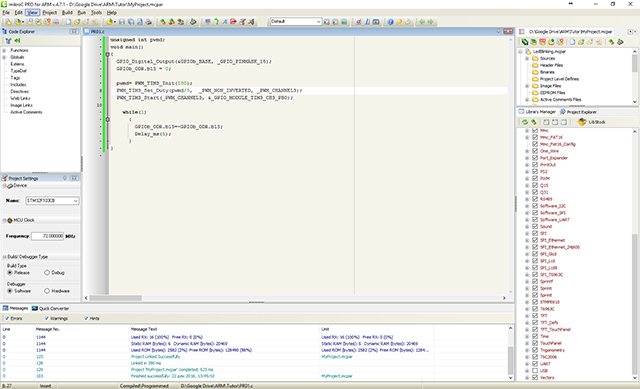
After starting and creating a project, the application window greets us:
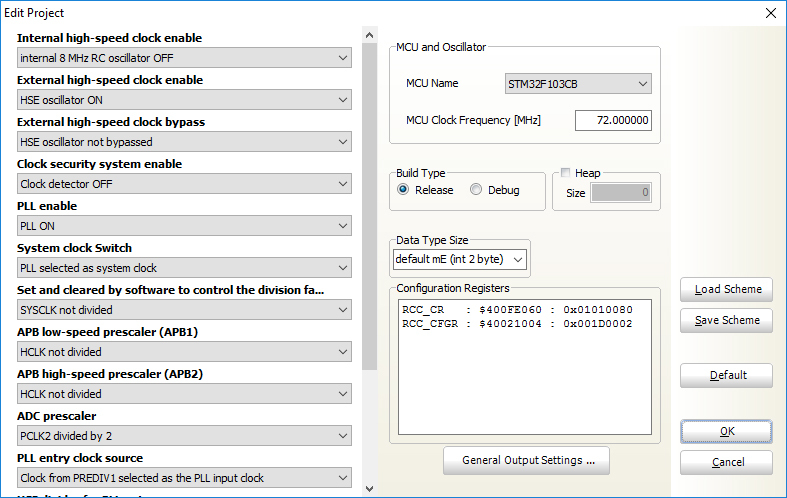
First of all, after choosing the type of microcontroller used, it is necessary to adjust the properties of our project. The configuration of the mikroC project is invoked with the keyboard shortcut Shift-Ctrl-E (Project - Edit Project). It is in this window that all the charms associated with the complex internal organization of the clocking system of STM32 microcontrollers are configured. In general, I advise you at least briefly read the Reference manual for this family of microcontrollers. We will return to it repeatedly.

The block diagram of the clocking system of datashita STM32F103
This window sets the configuration of the registers RCC_CR and RCC_CFGR
- Internal high-speed clock enable - Enable or disable the integrated 8 MHz generator (HSI) (oscillator OFF)
- External high-speed clock enable - Enable or disable the integrated 8MHz generator (HSE) (oscillator ON)
- External high-speed clock enable - Ability to connect to the OSC clock generator instead of quartz. We customize to use quartz (HSE oscillator not bypassed)
- Clock security system enable - Enabling the built-in controller of the system to protect against a clock signal failure; do not use yet (Clock detector OFF)
- PLL Enable - Enable / Disable frequency multiplying module (PLL ON)
- System clock switch - Select the SYSCLOCK clock signal: PLL, external or internal oscillator. We use PLL. It is at the HSE frequency multiplied by the PLL coefficient that the core of our controller works (PLL selected as system clock)
- AHB clock - Setting the SYSCLOCK prescaler for the AHB bus, which serves the peripheral modules of the MC; for now disable prescaler * (SYSCLOCK not divided)
- APB low-speed prescaller APB1 - frequency divider for low-speed MK peripherals, such as I2C buses, maximum operating frequency: 36 MHz (HCLK divided by 2)
- APB high speed prescaller APB 2- frequency divider for high-speed MK peripherals, such as I / O ports, timers, etc. (HCLK not devided)
- ADC prescaller - a prescaler for the ADC module relative to APB 2 (PCLK2 divided by 2)
- PLL entry clock source - the source of the clock signal to the PLL input, a choice of either 1/2 of the built-in RC oscillator or an external generator passed through PREDIV1; we use it exactly (Clock from PREDIV1 selected as the PLL input clock)
- HSE divider for PLL entry - setting up this very PREDIV1; do not use yet (HSE clock not divided)
- PLL multiplication factor - PLL multiplication factor. At the input we have a quartz frequency of 8 MHz, with a factor of 9, we have a frequency of 72 MHz for SYSCLOCK (PLL input clock x 9)
- USB prescaller - USB bus frequency. USB according to the specification operates at a frequency of 48 MHz, select the prescaler 1.5 (PLL clock divided by 1.5)
MSU clock frequency choose the frequency SYSCLOCK - 72 MHz (72.000000)
Now we can save the settings for our MK. Everything is ready for writing 1 program. As always, we blink an LED (connected to PB1 leg):
To set the output of the GPIO port to the output in the microC there is a function
GPIO_Digital_Output(&GPIO_BASE, _GPIO_PINMASK_ALL);// it includes GPIOx clocking and writes values to the configuration register. The data that is written to the port is entered in the register GPIOx_ODR .
GPIO_ODR = ; // c The compiler allows access to a particular register bit or variable. For this, the bit number (starting from 0) is written after the register name through the point
REGx.by; // (y) () To generate delays, use the built-in function Delay_ms () (or Delay_us () ) of the compiler. Here is our first program:
void main() { GPIO_Digital_Output(&GPIOb_BASE, _GPIO_PINMASK_1); // PB1 GPIOb_ODR.b1 = 0; // GPIOb_ODR 15 = 0 while(1) // { GPIOb_ODR.b1=~GPIOb_ODR.b1; // 15 Delay_ms(500); // 500 } } To apply one initialization command to several ports at once, write _GPIO_PINMASKn through the "or" operator, for example:
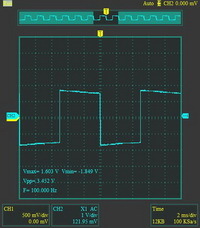
GPIO_Digital_Output(&GPIOb_BASE, _GPIO_PINMASK_1 | _GPIO_PINMASK_7); //PB1 PB7 GPIO_Digital_Output(&GPIOa_BASE, _GPIO_PINMASK_ALL ); // PA Now let's try to bring the meander to one of the MK pins, switching the output state of the PB15 port with an interval of 5 ms. :
void main() { GPIO_Digital_Output(&GPIOb_BASE, _GPIO_PINMASK_15); GPIOb_ODR.b15 = 0; while(1) { GPIOb_ODR.b15=~GPIOb_ODR.b15; Delay_ms(5); // 5 .( 10 , 100 ) } } At the pin PB15 we have the following signal:
If we need to read the state of the port, then we use the GPIOx_IDR register, having previously configured the port to the input using the GPIO_Digital_Input (* port, pin_mask) function. On our board there is a button connected to the pin of port PB8. The following program lights the flashing LED on pin PB1 while the button is pressed.
void main() { GPIO_Digital_Output(&GPIOb_BASE, _GPIO_PINMASK_1); GPIO_Digital_Input(&GPIOb_BASE, _GPIO_PINMASK_8); // PB8 GPIOb_ODR.b1 = 0; while(1) { if (GPIOb_IDR.b8) // 8 GPIOb_IDR 1 { GPIOb_ODR.b1=~GPIOb_ODR.b1; Delay_ms(500); // 500 } else { GPIOb_ODR.b1 = 0; // , } } } On this part 1 came to an end. In the second part I will try to acquaint you with the implementation of PWM modulation, work with timers and the function of suppressing the bounce of contacts on the button.
')
Source: https://habr.com/ru/post/318306/
All Articles