Why do we need the Ho-Kashyap algorithm?
Recently, a publication appeared on Habré about the Ho-Kashyap algorithm (the Ho-Kashyap procedure, which is also the NSCO algorithm, the smallest root-mean-square error). It seemed to me not very clear and I decided to sort out the topic myself. It turned out that in the Russian-speaking Internet the topic was not well disassembled, so I decided to issue an article based on the search results.
Despite the boom of neural networks in machine learning, linear classification algorithms remain much simpler to use and interpret. But at the same time, sometimes you don’t want to use any advanced methods, such as the support vector or logistic regression method, and the temptation is to drive all the data into one large linear least-squares regression , even more so it knows how to build MS Excel.
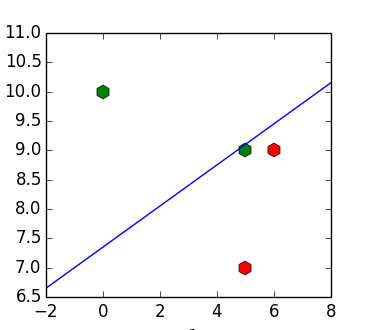
The problem with this approach is that even if the input data is linearly separable, the resulting classifier may not separate them. For example, for a set of points![X = [(6, 9), (5, 7), (5, 9), (10, 1)]](https://tex.s2cms.ru/svg/%20X%20%3D%20%5B(6%2C%209)%2C%20(5%2C%207)%2C%20(5%2C%209)%2C%20(10%2C%201)%5D%20) ,
, ![y = [1, 1, -1, -1]](https://tex.s2cms.ru/svg/%20y%20%3D%20%5B1%2C%201%2C%20-1%2C%20-1%5D%20) get the dividing line
get the dividing line %20%3D%200%20) (example borrowed from (1)):
(example borrowed from (1)):
')
The question is - is it possible to somehow get rid of this particular behavior?
To begin, we formalize the subject of the article.
Dana matrix each line
each line  which corresponds to the characteristic description of the object
which corresponds to the characteristic description of the object  (including constant
(including constant  ) and class label vectors
) and class label vectors  where
where  - object label . We want to build a linear classifier of the form.
- object label . We want to build a linear classifier of the form. %20%3D%20y%20) .
.
The easiest way to do this is to construct a least-squares regression for that is, minimize the sum of squared deviations
that is, minimize the sum of squared deviations %5E2%20) . The optimal weight can be found by the formula
. The optimal weight can be found by the formula  where
where  - pseudoinverse matrix. Thus, a picture from the beginning of the article.
- pseudoinverse matrix. Thus, a picture from the beginning of the article.
For convenience of writing, we multiply each line of inequality element by element. on  and call the resulting matrix on the left
and call the resulting matrix on the left  (here
(here  means line by line multiplication). Then the condition for OLS-regression is reduced to the form
means line by line multiplication). Then the condition for OLS-regression is reduced to the form  , and the minimization problem - to minimize
, and the minimization problem - to minimize %5E2%20) .
.
At this point, you can recall that the condition for the separation of classes is or %20%3D%201%20) and since we want to separate classes, we need to solve this problem.
and since we want to separate classes, we need to solve this problem.
We introduce a vector , wherein
, wherein  responsible for the distance from the element to the dividing line (
responsible for the distance from the element to the dividing line (  ). Since we want all elements to be classified correctly, we introduce the condition
). Since we want all elements to be classified correctly, we introduce the condition  . Then the task will be reduced to
. Then the task will be reduced to %5E2%20) and will decide how
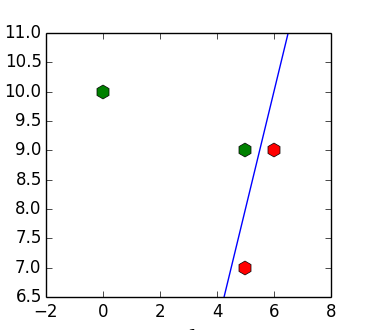
and will decide how  . You can manually pick up such values that the resulting plane will divide our sample:
. You can manually pick up such values that the resulting plane will divide our sample:
The Ho-Kashyap algorithm is designed to pick automatically. Algorithm diagram (  - step number
- step number %7D%20) usually taken equal ):
usually taken equal ):
I want to calculate the indentation vector in some way, like%7D%20%3D%20%5Cmax(Yw%5E%7B(k)%7D%2C%200)%20) because it minimizes the loss function . Unfortunately, the condition does not allow us to do this, and instead it is proposed to take a step on the positive part of the loss function gradient
because it minimizes the loss function . Unfortunately, the condition does not allow us to do this, and instead it is proposed to take a step on the positive part of the loss function gradient %7D%20%3D%20b%5E%7Bk%7D%20-%20Yw%5E%7B(k)%7D%20) :
: %7D%20%3D%20b%5E%7B(k)%7D%20-%20%5Cmu%20(e%5E%7B(k)%7D%20-%20%7Ce%5E%7Bk%7D%7C)%20) where
where  - step gradient descent, decreasing in the course of solving the problem.
- step gradient descent, decreasing in the course of solving the problem.
In the case of a linearly separable sample, the algorithm always converges and converges to the separating plane (if all the elements of the gradient are non-negative, they are all zero).
In the case of a linearly inseparable sample, the loss function can be arbitrarily small, since it suffices to multiply and  on a constant to change its value and, in principle, the algorithm may not converge. The search does not give any specific recommendations on this topic.
on a constant to change its value and, in principle, the algorithm may not converge. The search does not give any specific recommendations on this topic.
It can be noted that if the object is classified correctly, then the error in the stated optimization problem (%5E2%20) ) the error on it can be reduced to zero. If the object is classified incorrectly, then the minimum error on it is equal to the square of its indent from the dividing line (
) the error on it can be reduced to zero. If the object is classified incorrectly, then the minimum error on it is equal to the square of its indent from the dividing line ( %5E2%20) ). Then the loss function can be rewritten in the form:
). Then the loss function can be rewritten in the form:
%5E2%20-%202%5Cmax(0%2C%201%20-%20w%20Y_i)%20%20)
In turn, the loss function of a linear SVM is:
%20)
Thus, the problem solved by the Ho-Kashyap algorithm is an analogue of SVM with a quadratic loss function (it penalizes farther for emissions far from the dividing plane) and ignores the width of the dividing strip (that is, it’s not looking for a plane as far as possible from the nearest properly classified elements, and any dividing plane).
It may be recalled that the OLS-regression is an analogue of Fisher’s two-class linear discriminant (their solutions coincide up to a constant). The Ho-Kashpyap algorithm can also be applied to the case classes - in this and become matrices
classes - in this and become matrices  and
and  size
size  and
and  accordingly where
accordingly where  - the dimension of the problem, and
- the dimension of the problem, and  - number of objects. In this case, the columns corresponding to the wrong classes should have negative values.
- number of objects. In this case, the columns corresponding to the wrong classes should have negative values.
parpalak for a convenient editor.
rocket3 for the original article.
Despite the boom of neural networks in machine learning, linear classification algorithms remain much simpler to use and interpret. But at the same time, sometimes you don’t want to use any advanced methods, such as the support vector or logistic regression method, and the temptation is to drive all the data into one large linear least-squares regression , even more so it knows how to build MS Excel.
The problem with this approach is that even if the input data is linearly separable, the resulting classifier may not separate them. For example, for a set of points
')
The question is - is it possible to somehow get rid of this particular behavior?
Linear classification task
To begin, we formalize the subject of the article.
Dana matrix
>>> import numpy as np >>> X = np.array([[6, 9, 1], [5, 7, 1], [5, 9, 1], [0, 10, 1]]) >>> y = np.array([[1], [1], [-1], [-1]]) The easiest way to do this is to construct a least-squares regression for
>>> w = np.dot(np.linalg.pinv(X), y) >>> w array([[ 0.15328467], [-0.4379562 ], [ 3.2189781 ]]) >>> np.dot(X, w) array([[ 0.19708029], [ 0.91970803], [ 0.04379562], [-1.16058394]]) Linear separability
For convenience of writing, we multiply each line of inequality element by element.
>>> Y = y * X >>> Y array([[ 6, 9, 1], [ 5, 7, 1], [ -5, -9, -1], [ 0, -10, -1]]) At this point, you can recall that the condition for the separation of classes is
We introduce a vector
>>> b = np.ones([4, 1]) >>> b[3] = 10 >>> w = np.dot(np.linalg.pinv(Y), b) >>> np.dot(Y, w) array([[ 0.8540146 ], [ 0.98540146], [ 0.81021898], [ 10.02919708]]) Ho-Kashyap Algorithm
The Ho-Kashyap algorithm is designed to pick
- Calculate the OLS-regression coefficients (
).
- Calculate the indentation vector
.
- If the decision is not agreed (
), then repeat step 1.
I want to calculate the indentation vector in some way, like
>>> e = -np.inf * np.ones([4, 1]) >>> b = np.ones([4, 1]) >>> while np.any(e < 0): ... w = np.dot(np.linalg.pinv(Y), b) ... e = b - np.dot(Y, w) ... b = b - e * (e < 0) ... >>> b array([[ 1.], [ 1.], [ 1.], [ 12.]]) >>> w array([[ 2.], [-1.], [-2.]]) In the case of a linearly separable sample, the algorithm always converges and converges to the separating plane (if all the elements of the gradient are
In the case of a linearly inseparable sample, the loss function can be arbitrarily small, since it suffices to multiply
Connection of the Ho-Kashyap algorithm and linear SVM
It can be noted that if the object is classified correctly, then the error in the stated optimization problem (
In turn, the loss function of a linear SVM is:
Thus, the problem solved by the Ho-Kashyap algorithm is an analogue of SVM with a quadratic loss function (it penalizes farther for emissions far from the dividing plane) and ignores the width of the dividing strip (that is, it’s not looking for a plane as far as possible from the nearest properly classified elements, and any dividing plane).
Multidimensional case
It may be recalled that the OLS-regression is an analogue of Fisher’s two-class linear discriminant (their solutions coincide up to a constant). The Ho-Kashpyap algorithm can also be applied to the case
Thanks
parpalak for a convenient editor.
rocket3 for the original article.
Links
(1) http://www.csd.uwo.ca/~olga/Courses/CS434a_541a/Lecture10.pdf
(2) http://research.cs.tamu.edu/prism/lectures/pr/pr_l17.pdf
(3) http://web.khu.ac.kr/~tskim/PatternClass Lec Note 07-1.pdf
(4) A.E. Lepsky, A.G. Bronevich Mathematical methods of pattern recognition. Lecture course
(5) Tu J., Gonzalez R. Principles of Pattern Recognition
(6) R.Duda, P.Hart Pattern Recognition and Scene Analysis
Source: https://habr.com/ru/post/312774/
All Articles