How ITMO students create robots

In our blog we write about the development of communication systems and the first steps towards advanced programming.
However, participation in olympiads is not limited to student activity: today we will talk about how the Student Engineering Bureau (Robotics engineering department or RED), created in the framework of the ITMO Department of ITMO University, works.
')
How and why did the project RED
A bit of history: bachelors in the field of "Intelligent Technologies in Robotics" on the 3rd course of study undergo practical training at the department of CMS. So students get acquainted with real robotic systems and the basics of working with them. The practice lasts about a month, and during this period, students, working in groups or alone, implement their small project (most often software) on the existing equipment.
In the future, they often continue to work with the project started, improving it, but already within the framework of the subject “Software for mechatronic and robotic systems”.
In 2015, in the course of this practice, RED appeared: six of the most successful students were asked to become a “more significant” part of the department and form their own design office. Now at RED, the guys are not just “doing compulsory practice”, but also realizing their creative potential, can take part in Russian and foreign robot exhibitions, “grow” with their projects and gradually move from solving relatively simple tasks to more complex and large-scale ones.
Now the design office has several goals: the integration of students into the field of scientific research, participation in competitions in robotics and the implementation of student projects based on the equipment of the department.

Typical working environment at RED
What we use in work
In 2015, when the design bureau appeared, the ROS operating system became the mainstream practice. ROS is a set of packages and infrastructure for robots that facilitates the development and integration of various software components. In other words, ROS is a system software for programming robots that provides functionality for distributed work.
It is worth noting that ROS provides services such as hardware abstraction, low-level control of devices, the transfer of messages between processes and packet management. ROS is used both in amateur and educational projects, and for the development of industrial robots, in particular, ROS-Industrial software is used to describe models of robots.
The reason we chose ROS for the educational process is universality and relative simplicity. ROS introduces a level of abstraction, on which it is convenient to build interaction between equipment of different architecture. In addition, due to the presence of a huge number of packages, very often there is no need to write a hardware driver from scratch. Of course, ROS is not the best or the only correct solution.
For example, for programming robots executed on the TRIK controller, which was developed by our colleagues from Mat-Mech at St. Petersburg State University, their own SDK is used.
What we develop
Already in 2015, we managed to implement several projects on the basis of the design bureau: among them there is a promoter robot, distributing flyers (based on the Johnny5 robot from Lynxmotion) and a global localization system for the multi-agent system of two robots (based on the Robotino Festo Didactic).
Robot promoter
Two bachelors of the third year worked on Johnny5 for 3 months. Initially, the Johnny5 robot did not have a “brain” to process any information, since its controller is only responsible for managing the servos, so an external computer with ROS installed is used as an information processor.
Getting information about the outside world occurs through motion recognition devices such as Microsoft Kinect or ASUS Xtion. Actually, through ROS, there is a “communication” between the vision system, the computer and the controller of the robot. To do this, the students wrote a driver for the controller to send commands to it via the serial interface, as well as a handler program to control the visual data.
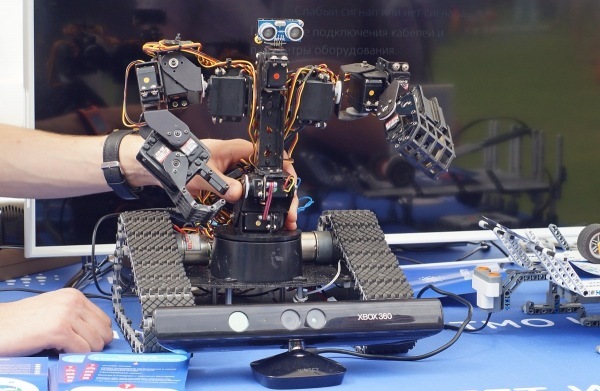
Robot Johnny5 distributes flyers on GeekPicnic-2015
Students managed to make a small unification of vision, which now allows using any motion recognition device, if there is a driver for it under ROS. For example, drivers for Microsoft Kinect and ASUS Xtion were taken from free libraries.
As a result, the students turned out to be a robot that is able to detect a person, to attract his attention, and as soon as a person comes closer - to issue a flyer. In the future we plan to teach the robot to recognize the faces of people, and also to replace the large computer with a single board, similar to the Raspberry Pi.
Multi-agent system based on Robotino
Robotino was also worked on by two third-year bachelor students for a month. ROS libraries already have packages for working with Robotino, and by students these packages were adjusted so that it became possible to control two or more robots from one PC. The indoor navigation system, the Northstar Sensor from Festo Didactic, is used as a view.
In addition, students created software that performs the calculations necessary to obtain an estimate of the position of the robot. Thus, Robotino robots can be localized, that is, get an unbiased assessment of their position, on an area substantially larger than Northstar allows out of the box.

RED visiting UFES University, Vitoria, Brazil
RED robots are becoming popular
Since then, the RED team has participated in several popular science events, such as GeekPicnic and the “Robots Ball” exhibition, and also established contact with colleagues in the robotics field in Brazil (UFES, UNESP, UFABC universities).
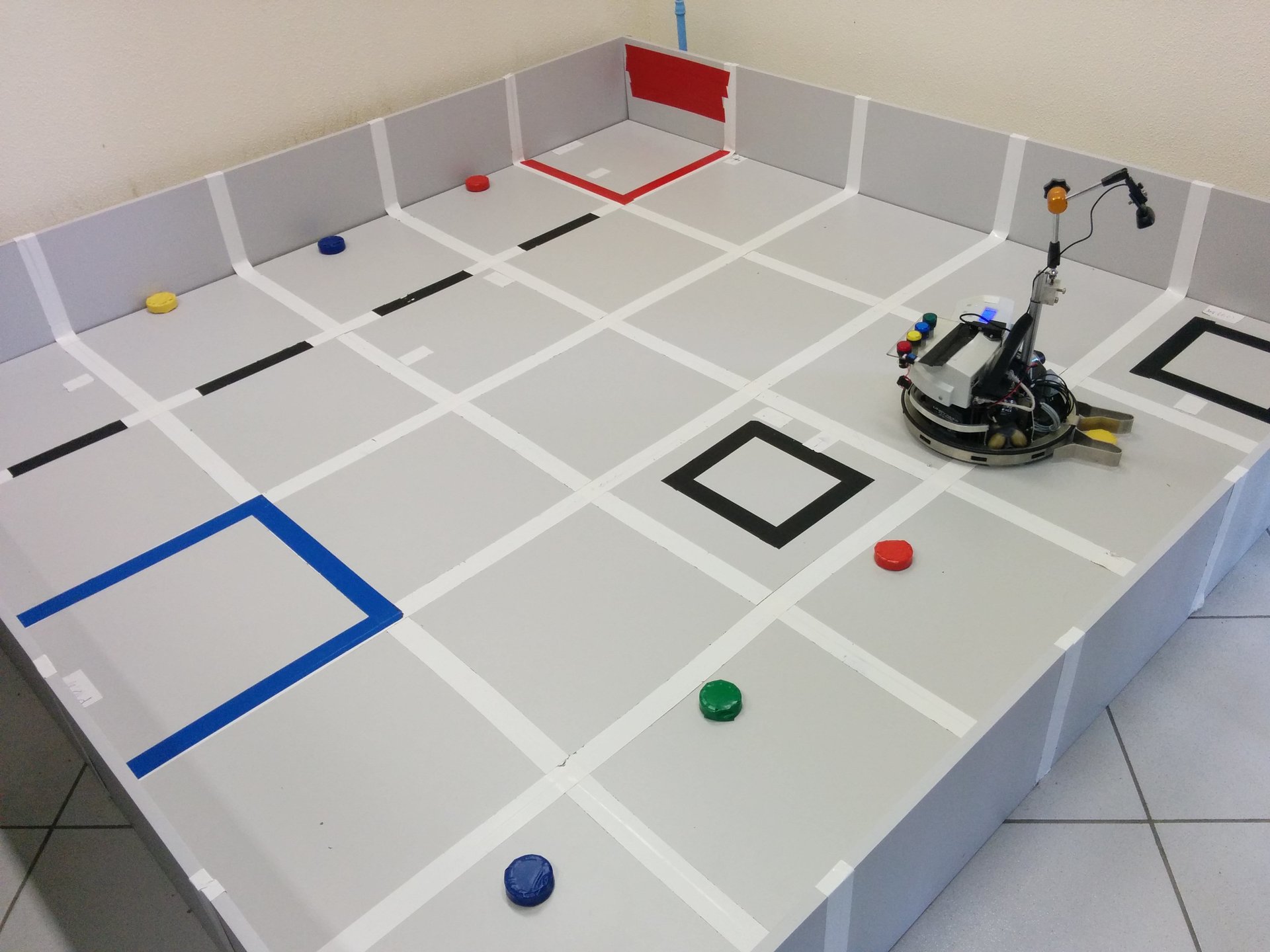
Competition field for the RoboCup Logistics League at UNESP University, Sao Paulo, Brazil
In the summer of 2015, together with colleagues from Mat-Mek St. Petersburg State University, a series of workshops on robotics was organized - Summer Cybernetics School 2015. The design bureau's team also increased: our work interests not only trainees, but also second and even first-year students - they are usually attracted to work at RED while completing training tasks.
The RED management suggests that they continue to work on their projects as part of RED, and then proceed to more serious tasks. Junior students make a contribution to the work of RED, for example, some of them are engaged in robot football. The most capable early recruited to the RED.

Summer Cybernetic School 2015
Future plans
When choosing a new task, students at RED are repelled by the available equipment and therefore formulate tasks for existing robots and sensors. Fortunately, their diversity is so great that we can solve problems of robotics in various areas, from navigation to control of the manipulator.
There are existing projects to which students can also join. In addition, everyone can offer a new project for a new equipment, and if the majority decides that the project is worth it, funds will be allocated from the RED budget.
In general, our team is interested in a variety of areas of robotics. Judging by the tasks performed over the past year, these include:
- Technical vision of robots;
- Robot mapping and localization (SLAM) (using infrared sensor-rangefinder and cameras with a deep image);
- Control of the manipulator (direct and inverse problems of kinematics);
- Football robots.
In the future, RED will participate in international competitions in robotics (in particular, RoboCup and Eurobot). In addition, some RED members, along with freelancers, are engaged in a project related to the integration of mobile robotics into the Ethereum decentralized network.
Source: https://habr.com/ru/post/279663/
All Articles