Millions of points in nanoCAD Plus 7, or A little more about point clouds

In nanoCAD Plus 7, which was released on May 18, 2015, a number of functions appeared, significantly expanding the scope and positioning of the nanoCAD platform. We bring to the attention of our readers a number of technical articles in which we dive into these functions in more detail, consider what opportunities they have and how they can be applied in practice. This article is devoted to a complex of functions, united by the common name Cloud Point .
Introduction
 What is a "point cloud"? This is a set of points in three-dimensional space, obtained as a result of 3D scanning of an object of the real world and representing the surface of this object. 3D scanning is implemented by specialized devices - 3D scanners, which automatically measure a large number of points on the surface of the scanned object and create a cloud of points at the output (Fig. 1). The output of the 3D scanner contains XYZ coordinates and metadata, depending on the type of 3D scanner. Metadata refers to specific data that is a by-product of the process of measuring the coordinates of points. For example, for active contactless scanners, these will be the intensity of the reflected signal, the number of reflections, the point fixation time, the color of the surface, etc. The amount and quality of data depends on the 3D scanner used. Storage and processing of point clouds introduce additional user metadata (attributes): class (code) points, non-local geometric characteristics (pseudonormal, topological indicators), etc.
What is a "point cloud"? This is a set of points in three-dimensional space, obtained as a result of 3D scanning of an object of the real world and representing the surface of this object. 3D scanning is implemented by specialized devices - 3D scanners, which automatically measure a large number of points on the surface of the scanned object and create a cloud of points at the output (Fig. 1). The output of the 3D scanner contains XYZ coordinates and metadata, depending on the type of 3D scanner. Metadata refers to specific data that is a by-product of the process of measuring the coordinates of points. For example, for active contactless scanners, these will be the intensity of the reflected signal, the number of reflections, the point fixation time, the color of the surface, etc. The amount and quality of data depends on the 3D scanner used. Storage and processing of point clouds introduce additional user metadata (attributes): class (code) points, non-local geometric characteristics (pseudonormal, topological indicators), etc.Fig. 1. Clouds of points are obtained as a result of 3D scanning of objects.
The image is taken from N. Pelevin's article “ What types of 3D scanners exist? "
')
The quality of the cloud directly depends on the quality of the 3D scanner, its resolution, accuracy and scanning speed. It is clear that serious tasks require serious devices, but today the source of the cloud can even be the popular Kinect sensor of the Microsoft XBOX game console, which for many lives under the home TV and forms a three-dimensional image through a pair of simple sensors. Technologies are becoming more accessible every day - this is precisely what explains the interest in point clouds.
Why not need? First of all, point clouds provide fast visualization of a real-world object of interest to you. But, of course, they are not limited only to this area - clouds of points are successfully used for changes and control, 3D printing, virtualization of hard-to-reach places or large extended objects, creating three-dimensional and mathematical models, pattern recognition, as well as automated analysis, reconstruction and operation. . No doubt, point clouds introduce a lot of useful information into computer-aided design systems: we will talk about some directions in this article, but maybe you will think of something yourself - it seems to us that the potential of three-dimensional point clouds has not yet been fully revealed. technology can be an excellent tool for solving your problems.
Clouds of points in nanoCAD Plus
So, starting from version 7.0, support for point clouds appeared in the domestic CAD-platform nanoCAD Plus. In particular, the software product received an additional menu section, which combines the functions of import and display of point clouds (Fig. 2). The first item is the import function.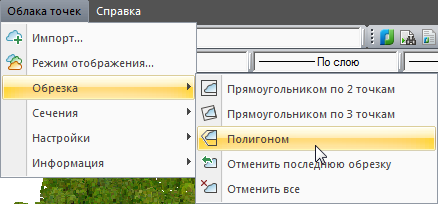
Fig. 2. A set of commands that appeared in nanoCAD Plus 7.0 for working with point clouds
Supported Formats
First, let's understand what formats nanoCAD Plus 7.0 supports. The Import command provides the ability to download point clouds of five popular formats: BIN (TerraSolid), LAS (ASPRS), PTX (Leica), PTS (Leica) and PCD (Point Cloud Library). Own module of direct import allows you to save maximum information from the source file.Such a trip does not just make the work more convenient - during the import process, the user can get general information about the point cloud, filter the imported metadata and pre-classify the points: by class (code), by reflection, etc. Thus, the data already arrive in CAD in a more orderly manner (Fig. 3).
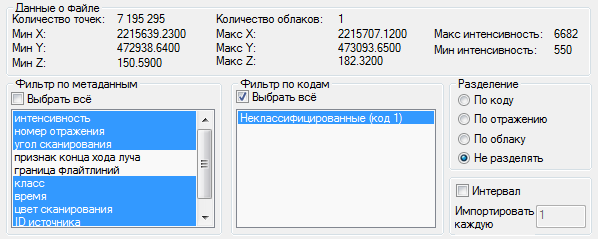
Fig. 3. Direct support for popular formats with which 3D-scanners work allows you to control the parameters of the cloud of points in CAD
Information about binding and setting up the display of a cloud of points is stored in a * .dwg file.
In the future, users will be able to save the cloud inside the * .dwg file, as was done in the previous version of nanoCAD Plus for bitmap images. This possibility reduces the risk of losing data when transferring the project to third-party contractors and the customer.
Amount of 3D scan data supported by nanoCAD Plus
The number of points in the cloud depends on the resolution of the 3D scanner. Clouds of 3-4 million points are considered quite common. Ultra-large clouds contain a billion points and more — sufficiently powerful computers and specialized algorithms are needed to process this amount of data.In nanoCAD Plus 7.0, there are no technical limitations on the volume of point clouds, and the algorithms themselves are optimized for processing extra-large arrays - see fig. 4, which shows examples of working with large point clouds (an example file of a workshop (129 million points) was obtained using Leica scanners and provided by representatives of this company).

Fig. 4. nanoCAD Plus 7.0 allows you to work with extra-large clouds of 1 billion points and more
Point cloud display
nanoCAD Plus allows you to customize the display of the imported point cloud - the Display Mode command is responsible for this. Here you can set the type of cloud coloring and the size of the point - point clouds are painted very impressively, colored by the scan color (Fig. 5). In fact, three-dimensional photographs of scanned objects are obtained, on which you can walk, embed them into an existing 3D model, and even use snapping to cloud points for any constructions. It should be noted that this functionality is open for vertical applications that are loaded into nanoCAD Plus. And developers of such applications can use an extensive programming interface to access information about cloud points and their parameters.
Fig. 5. Clouds can be colored according to the metadata of the points: by scanning color, height, intensity, scanning angle, etc.
If you have nanoCAD Plus 7.0 installed, you can wander yourself in the cloud of points - the examples folder contains in the * .dwg format an uncomplicated model with filtration equipment. Try to change her color, thickness of points, walk along the model in the perspective navigation mode. In the same folder you will find other examples of three-dimensional point projects.
Operations on point clouds
What can I do with point clouds, except visualization? If you theorize, the number of useful functions will be simply enormous: you can compare models, identify collisions, isolate objects according to certain signs (for example, according to metadata), classify groups of points according to various signs, stitch-cut clouds of points according to these or additional signs, recognize surfaces and objects ...But all these tasks are the functionality of highly specialized solutions specific to a particular subject area. In nanoCAD Plus 7.0, the set of tools for working with point clouds is somewhat more modest and is designed for mass use. In particular, the platform allows you to perform:
- pruning point clouds along rectangles or along a polygon. This allows you to reduce the size of the cloud with which the user is currently working, and isolate from the cloud of points the model you need to work;
- building a vertical or horizontal section of a point cloud. For example, using this function, you can get a cross section of a building or the surface of the earth (Fig. 6);
- snapping to the nearest points of the section and geometric constructions over the cross-section of a cloud of points.
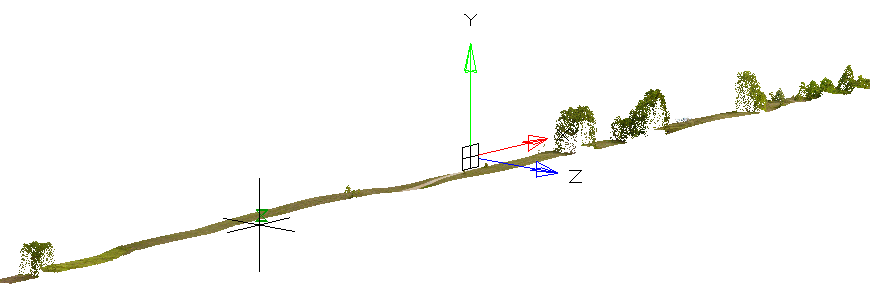
Fig. 6. Section, built on the point cloud in nanoCAD Plus 7.0
What practical application do these tools have? One of the methods of working with the functional sections and clips is the segmentation of the point cloud in order to organize a convenient work with the target part of the space, removing the influence of other parts of the cloud. In addition to this, the bindings to the point cloud feature allows you to effectively rely on points for measuring, tracing three-dimensional objects, and even three-dimensional modeling. By attaching to cloud points, you can use the capabilities of all nanoCAD staff commands to measure distances and lengths, perimeters, and areas.
For tracing the projections of three-dimensional objects in cross-sections of point clouds, we use a wide range of nanoCAD drawing tools available, and for three-dimensional constructions using the geometry of point clouds, you can use all the functionality of the new 3D modeling module .
Examples of working with point clouds
By applying additional algorithms to data obtained from point clouds, we can solve more intelligent problems. For example, here is a video of digitizing the facades of buildings in Venice (using the RIEGL VMX-250 mobile laser scanning system) and further analyzing the facades on the results of deformations and the consequences of vandals:An example of using point clouds for automated analysis of facades of buildings in Venice
And here is an example of digitizing the Grand Canyon (USA) with the help of RIEGL VZ-4000 scanners - see how three-dimensional models are created:
Practical scanning on the example of creating a three-dimensional model of the Grand Canyon
Three-dimensional scanning allows you to describe models of hard-to-reach objects - for example, abandoned mines:
An example of creating a three-dimensional model of an abandoned mine
In addition, on the Internet you will find a lot of other examples of the original application of point cloud technology. The solution of all these tasks became possible due to the development of software and hardware.
Conclusion
Here is what an interesting technology is now implemented in the nanoCAD Plus platform. Someone will say that while the direction of 3D scanning is more of an advertising character. Partly agree - this technology can still be developed and improved. Actually, this is exactly what we call for - let's find practical tasks in which 3D scanning, pattern recognition and intelligent data processing technologies are in demand. We are ready to cooperate.And now you can download point clouds, build sections, take measurements, and trace three-dimensional objects. This functionality is available in nanoCAD Plus, and you can try it in demo mode. So you have a starter kit. Good projects!
Source: https://habr.com/ru/post/267623/
All Articles