Another algorithm for determining the intersection of two segments
Recently there was a publication "A simple algorithm for determining the intersection of two segments . " I decided to try to solve the problem of intersection of two segments a little differently, more geometrically.
Finding the point of intersection of two segments.
We have 2 segments {P0, P1} and {P2, P3}, where P0, P1, P2, P3 are points on the plane. We denote the xy coordinates of the point P as Px and Py
We have the coordinates of 4 points in the array P (0..3) of the point (x float, y float) structure:
')
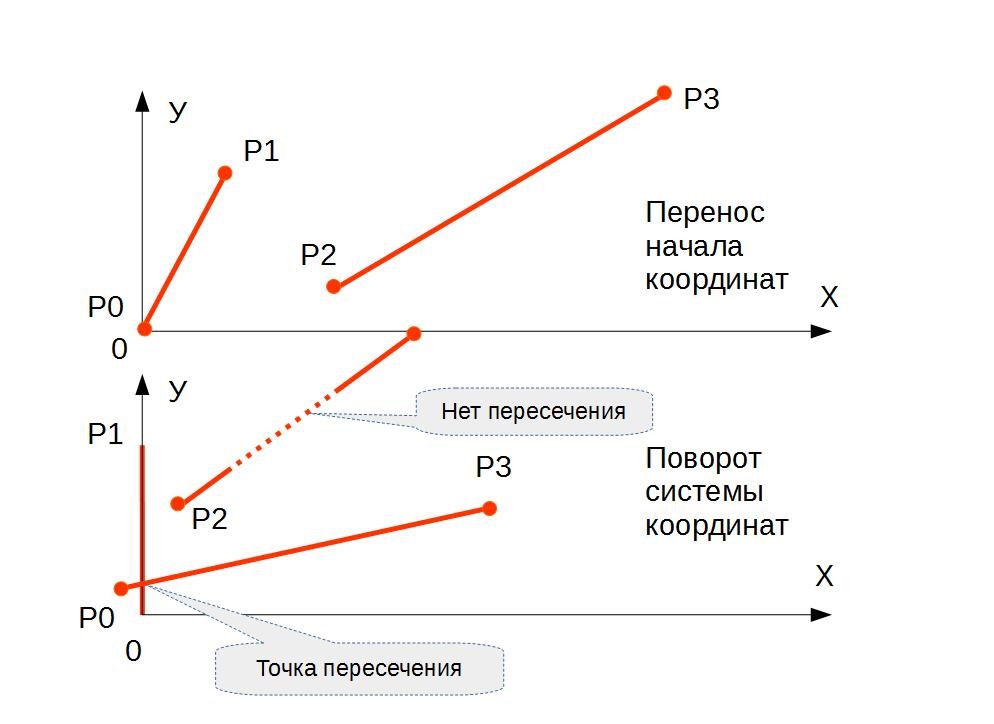
Step 1 - Transferring the origin.
Remember the coordinates of points P in the additional array P_copy. Transfer the origin of the coordinate system to the point P0 and recalculate the coordinates of the points:
Step 2 - Rotate the origin
Rotate the coordinate system so that the segment {P0, P1} takes the vertical position (lay on the Y axis). Calculate the length of the segment {P0, P1} as:
Sine and cosine of the angle of alfa rotation of the axes:
Again recalculate the coordinates of the points P1, P2, P3:
Step 3 - Search for the intersection point of the segments.
We write the equation of the segment {P2, P3} and find its intersection point CR with the Y axis:
where 0 <= beta <= 1
At the CR intersection of the segment {P2, P3} with the Y axis:
Further, there are 2 options, depending on the value of P (3) .x - P (2) .x:
1 option:
Option 2:
If P (2) .x = P (3) .x, then this means that the segment {P2, P3} is vertical and parallel to the segment {P0, P1}. Intersection of segments is possible only if the second segment {P2, P3} also lies on the Y axis, and one of its ends lies in the first segment {P0, P1} (or touches) or the segment {P2, P3} covers {P0, P1}. We assume that for the result we need one point. This will be one of the points P0..P3.
Conditions:
Step 4
If the intersection point of CR is found by option 1 of step 3, then its coordinates are recalculated for the original coordinate system. We use the variables saved in step 1 and 2. Rotate -alfa angle:
Transfer back:
If the intersection point CR is found by condition 2 of step 3, the coordinate recalculation is not needed. Sample code for golang under the cut. Golang ohm, I just indulge, so I ask the code to be indulgent. The code can be run on golang.org :
Finding the point of intersection of two segments.
We have 2 segments {P0, P1} and {P2, P3}, where P0, P1, P2, P3 are points on the plane. We denote the xy coordinates of the point P as Px and Py
We have the coordinates of 4 points in the array P (0..3) of the point (x float, y float) structure:
')
Step 1 - Transferring the origin.
Remember the coordinates of points P in the additional array P_copy. Transfer the origin of the coordinate system to the point P0 and recalculate the coordinates of the points:
P_copy = P P(0).x = 0 ; P(0).y = 0 for ii = 1 to 3 P(ii).x = P(ii).x - P_copy(1).x ; P(ii).y = P(ii).y - P_copy(1).y next Step 2 - Rotate the origin
Rotate the coordinate system so that the segment {P0, P1} takes the vertical position (lay on the Y axis). Calculate the length of the segment {P0, P1} as:
L1 = SQRT ( (P(1).x)^2 + (P(1).y)^2 )
Sine and cosine of the angle of alfa rotation of the axes:
L1 > 0 sin_alf = sin(alfa) = P(1).x / L1 cos_alf = cos(alfa) = P(1).y / L1 L1 = 0 // sin_alf = 0 cos_alf = 1 Again recalculate the coordinates of the points P1, P2, P3:
P(0).x = 0 ; P(0).y = 0 // P0 , P(1).x = 0 ; P(1).y = L1 P(2).x = P(2).x * cos_alf - P(2).y * sin_alf P(2).y = P(2).y * cos_alf + P(2).x * sin_alf P(3).x = P(3).x * cos_alf - P(3).y * sin_alf P(3).y = P(3).y * cos_alf + P(3).x * sin_alf Step 3 - Search for the intersection point of the segments.
We write the equation of the segment {P2, P3} and find its intersection point CR with the Y axis:
P23X = P(2).x + ( P(3).x - P(2).x ) * beta
P23Y = P(2).y + ( P(3).y - P(2).y ) * beta
where 0 <= beta <= 1
At the CR intersection of the segment {P2, P3} with the Y axis:
P(2).x + ( P(3).x - P(2).x ) * beta =0
Further, there are 2 options, depending on the value of P (3) .x - P (2) .x:
1 option:
( P(2).x - P(3).x ) <> 0 // {P2,P3} beta = P(2).x / ( P(2).x - P(3).x ) beta >= 0 beta <= 1 // {P2,P3} Y CR.x = 0 CR.y = P(2).y + ( P(3).y - P(2).y ) * beta // : 0 <= CR.y <= L1 Option 2:
If P (2) .x = P (3) .x, then this means that the segment {P2, P3} is vertical and parallel to the segment {P0, P1}. Intersection of segments is possible only if the second segment {P2, P3} also lies on the Y axis, and one of its ends lies in the first segment {P0, P1} (or touches) or the segment {P2, P3} covers {P0, P1}. We assume that for the result we need one point. This will be one of the points P0..P3.
Conditions:
P(2).x = P(3).x = 0 // {P2,P3} b Y. // : P(2).y >= 0 P(2).y <= L1 // P2 {P0,P1} -> CR = P_copy(2) // P2 P(3).y >= 0 P(3).y <= L1 // P3 {P0,P1} -> CR = P_copy(3) // P3 P(2).y < 0 P(3).y > L1 // {P0,P1} {P2,P3} P(3).y < 0 P(2).y > L1 -> CR = P_copy(0) // // P0 ( P1) ) Step 4
If the intersection point of CR is found by option 1 of step 3, then its coordinates are recalculated for the original coordinate system. We use the variables saved in step 1 and 2. Rotate -alfa angle:
CR.x = CR.x * cos(-alfa) + CR.y * sin(-alfa) = CR.x * cos_alf + CR.y * sin_alf CR.y = CR.y * cos(-alfa) - CR.x * sin(-alfa) = CR.y * cos_alf - CR.x * sin_alf Transfer back:
CR.x = CR.x + P_copy(0).x CR.y = CR.y + P_copy(0).y If the intersection point CR is found by condition 2 of step 3, the coordinate recalculation is not needed. Sample code for golang under the cut. Golang ohm, I just indulge, so I ask the code to be indulgent. The code can be run on golang.org :
golang code
// line_cross project main.go package main import ( "fmt" "math" ) type point struct { x float64 y float64 } func main() { var P [4]point var P_copy [4]point var L1, sin_alf, cos_alf, wsp1, wsp2, beta float64 var flag_cross bool var CR point // xy P[0].x = 1.0 P[0].y = 2.0 P[1].x = 10.0 P[1].y = 20.0 P[2].x = 3.0 P[2].y = 9.0 P[3].x = 9.0 P[3].y = 3.0 // 1 P_copy = P fmt.Println(" :") for ii := 0; ii < 4; ii++ { fmt.Println(" p", ii+1, " x", P_copy[ii].x, " y", P_copy[ii].y) } P[0].x = 0 P[0].y = 0 for ii := 1; ii < 4; ii++ { P[ii].x = P[ii].x - P_copy[0].x P[ii].y = P[ii].y - P_copy[0].y } // 2 L1 = math.Sqrt(P[1].x*P[1].x + P[1].y*P[1].y) if L1 > 0 { sin_alf = P[1].x / L1 cos_alf = P[1].y / L1 } else { sin_alf = 0 cos_alf = 0 } P[1].x = 0 P[1].y = L1 for ii := 2; ii < 4; ii++ { wsp1 = P[ii].x*cos_alf - P[ii].y*sin_alf wsp2 = P[ii].y*cos_alf + P[ii].x*sin_alf P[ii].x = wsp1 P[ii].y = wsp2 } // 3 flag_cross = false if P[2].xP[3].x == 0 { // {P3,P4) {P0,P1) if P[2].x == 0 && P[3].x == 0 { switch { case P[2].y >= 0 && P[2].y <= L1: flag_cross = true CR = P_copy[2] case P[3].y >= 0 && P[3].y <= L1: flag_cross = true CR = P_copy[3] case (P[2].y < 0 && P[3].y > L1) || (P[3].y < 0 && P[2].y > L1): flag_cross = true CR = P_copy[0] } } } else { beta = P[2].x / (P[2].x - P[3].x) if beta >= 0 && beta <= 1 { CR.x = 0 CR.y = P[2].y + (P[3].yP[2].y)*beta if CR.y >= 0 && CR.y <= L1 { // 4 // flag_cross = true wsp1 = CR.x*cos_alf + CR.y*sin_alf wsp2 = CR.y*cos_alf - CR.x*sin_alf CR.x = wsp1 CR.y = wsp2 CR.x = CR.x + P_copy[0].x CR.y = CR.y + P_copy[0].y } } } if flag_cross { fmt.Println(" : =", CR.x, " y=", CR.y) } else { fmt.Println(" !") } } Source: https://habr.com/ru/post/267461/
All Articles