Magic of tensor algebra: Part 15 - Motion of a non-free solid
Content
- What is a tensor and what is it for?
- Vector and tensor operations. Ranks of tensors
- Curved coordinates
- Dynamics of a point in the tensor representation
- Actions on tensors and some other theoretical questions
- Kinematics of free solid. Nature of angular velocity
- The final turn of a solid. Rotation tensor properties and method for calculating it
- On convolutions of the Levi-Civita tensor
- Conclusion of the angular velocity tensor through the parameters of the final rotation. Apply head and maxima
- Get the angular velocity vector. We work on the shortcomings
- Acceleration of the point of the body with free movement. Solid Corner Acceleration
- Rodrig – Hamilton parameters in solid kinematics
- SKA Maxima in problems of transformation of tensor expressions. Angular velocity and acceleration in the parameters of Rodrig-Hamilton
- Non-standard introduction to solid body dynamics
- Non-free rigid motion
- Properties of the inertia tensor of a solid
- Sketch of nut Janibekov
- Mathematical modeling of the Janibekov effect
Introduction
Last time we considered one of the ways to obtain differential equations of motion of a rigid body based on the d'Alembert principle. We settled on the general form of the equations of motion.
However, carefully looking at these equations, I should criticize - the fact is that the number of unknowns in these equations is too large. The unknowns include pole acceleration.
')
This is because the left side of equations (1) and (2) contains accelerations calculated for the case of free body motion, that is, they have redundant coordinates. Therefore, system (1), (2) should be supplemented with equations of bonds describing the constraints imposed by the constraints on the coordinates, velocities and accelerations of points of the body.
This is what we are going to do now - let's see what equations (1) and (2) turn into when adding link equations, and what the resulting equations give us in a practical sense.
1. Equations of motion of a free solid
A free body is a body whose movement is not limited to bonds. Accordingly, in the equations (1) and (2) the extra unknowns disappear and they turn into
And for a free body it makes no sense to use an arbitrary pole - it is better to change the center of reduction of the inertial force systems to the center of mass of the body, writing down the equations of motion in a simpler form
Equations (5) and (6) are the differential equations of free motion of a rigid body. They can be resolved with respect to accelerations and integrated numerically, given the initial conditions.
2. Equations of motion of a rigid body with one fixed point
Now suppose that the movement of the body is limited by a spherical hinge located at the point
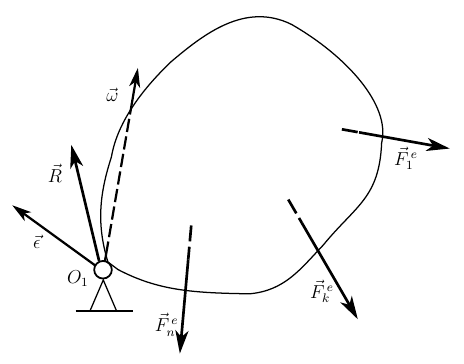
The reaction of the spherical hinge, is expressed by one force
where
Equation (8) allows us to determine the angular acceleration of the body, based on the initial conditions of the problem and the known active forces applied to the body, and equation (9) makes it possible, knowing the angular acceleration, to find the reaction of the spherical hinge. Thus, we obtain the differential equations of spherical motion.
3. Rotational movement of the body. The moment of inertia of the body relative to the axis
Rotational motion is called the movement of a body when its two points remain motionless at any moment in time. If we express this fact with the help of equations, then we can write the following equations of relations
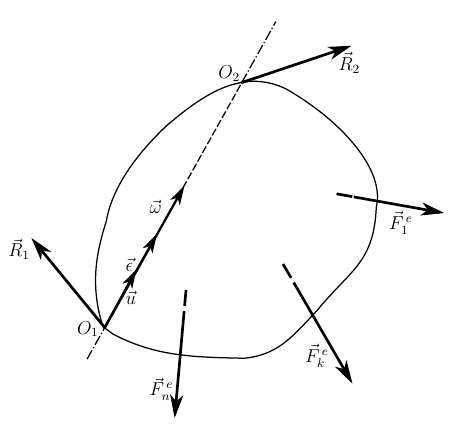
Condition (10) expresses the immobility of one of the points of the body, and condition (11) - the invariance of the direction of the axis of rotation of the body. Based on (11), one can write out the angular velocity and angular acceleration of the body through the parameters of the final turn
Substituting (12) and (10) into equation (2)
Considering that we have two connections, and accordingly two reactions from bearings, on which the body rotates. And you can immediately take into account that
Consider that the moment of the second reaction can be calculated as
The second components in both parts of this equation are mixed products of coplanar vectors and are zero, as a result, we have
- differential equation of rotation of the body around a fixed axis, where
called the moment of inertia of a solid relative to the axis of rotation , and
- the projection of the vector moment relative to a fixed point on the axis passing through this point or - the moment of force relative to the axis .
Expression (14) is extremely interesting. If we rewrite it in tensor form, then we get the formula
allowing, using the well-known inertia tensor of a solid body, to determine its moment of inertia about the axis of rotation of interest to us, whose direction in space is given by an ort
4. Translational body movement
In the progressive movement, the bonds imposed on the body prevent its rotation. In this case, we can write obvious equalities.
Assuming the ideality of relationships, we can write down the condition imposed on their reactions
Where
or
- the differential equation of the translational motion of the body in projections on the tangent to the trajectories of its points.
Conclusion
In this article, we examined how the general equations of motion of a rigid body (1) and (2) are transformed if we supplement them with equations of constraints. At the same time, we easily and naturally constructed differential equations of motion for all special cases of body motion, studied by theoretical mechanics.
Thanks
In preparing this article , the method proposed by the SeptiM user was used . In connection with the obvious convenience of work, I want to express my gratitude to the author for the work he has done.
To be continued...
Source: https://habr.com/ru/post/263853/
All Articles