Temperature control in server cabinets with Arduino
 In a previous post I talked about projects created by FLProg users. And today I want to talk about the system created by me.
In a previous post I talked about projects created by FLProg users. And today I want to talk about the system created by me.Server at the station where I work, as it should be in a separate room. For cooling servers there are two air conditioners. Unfortunately, these are ordinary household models, so regularly one or the other is under repair. The management of the department, knowing about my work on the FLProg project, proposed to create a system for monitoring the temperature in the server cabinets, and controlling the operation of their fans. Information on the current temperature should be displayed on the board in the room of engineers on duty, and in the case of a temperature rise above a certain threshold, issue an audible alarm. I took this job, and that's what happened ...
The situation was complicated by the fact that we are somewhere 200 kilometers from the nearest civilization, and I had to collect the system from the reserves that I had with me, plus something from the old rubbish from the storerooms. In stock I had:
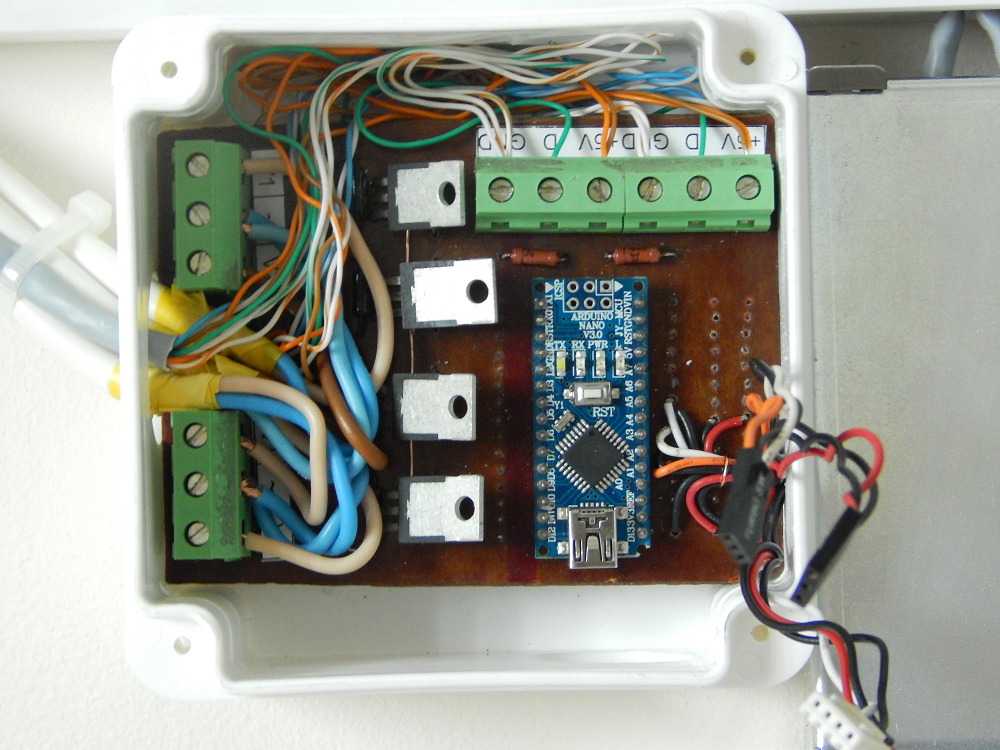
1. Arduino Nano
2. DS18B20 temperature sensor
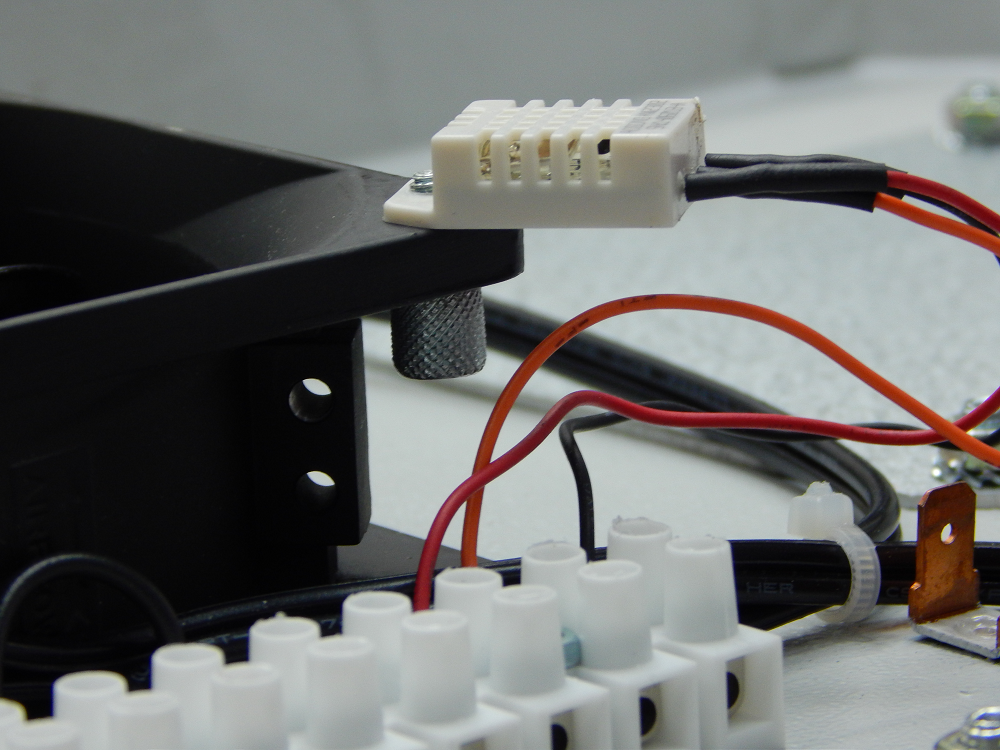
3. Two temperature and humidity sensors DHT-22
4. Four-line display for 20 characters per line with I2C board
')
The scheme of the device was developed: Schematic diagram
Then printed circuit boards are developed:
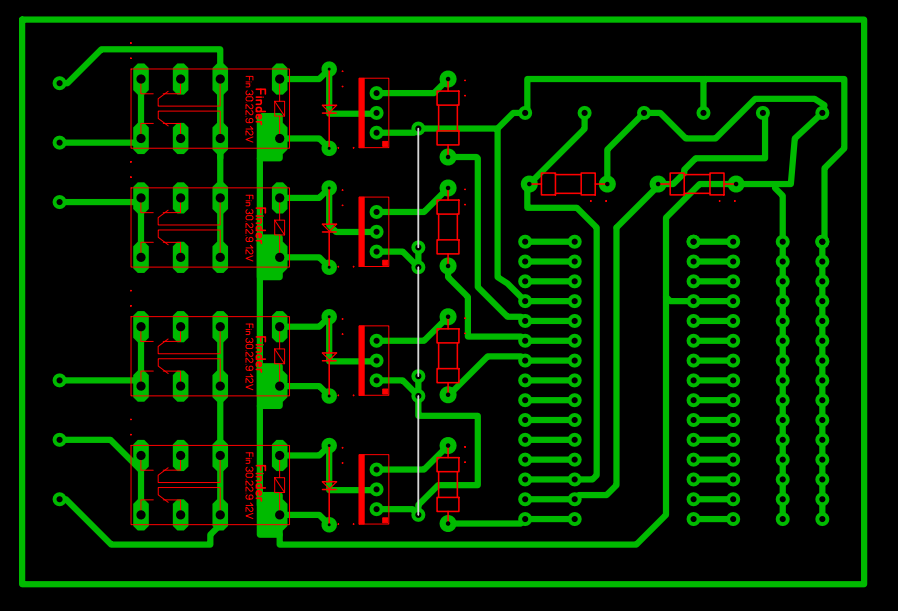
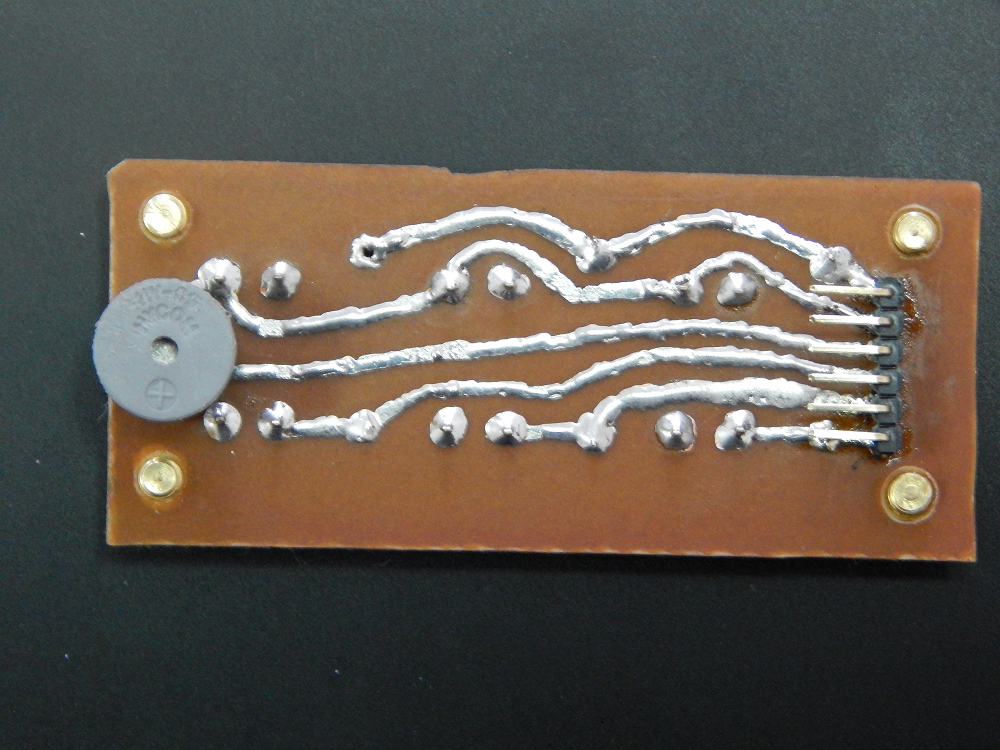
Sprint-Layout_6 main board
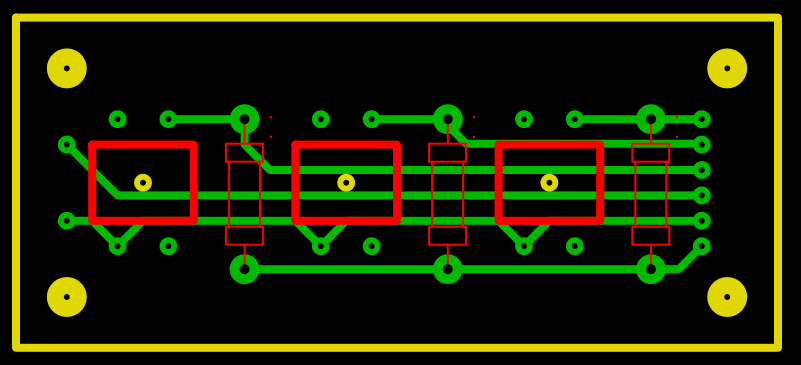
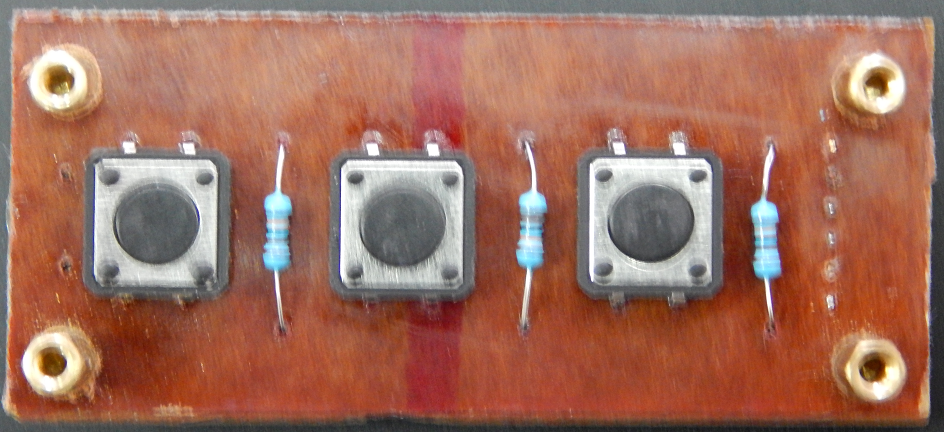
Push-button board in the program Sprint-Layout_6
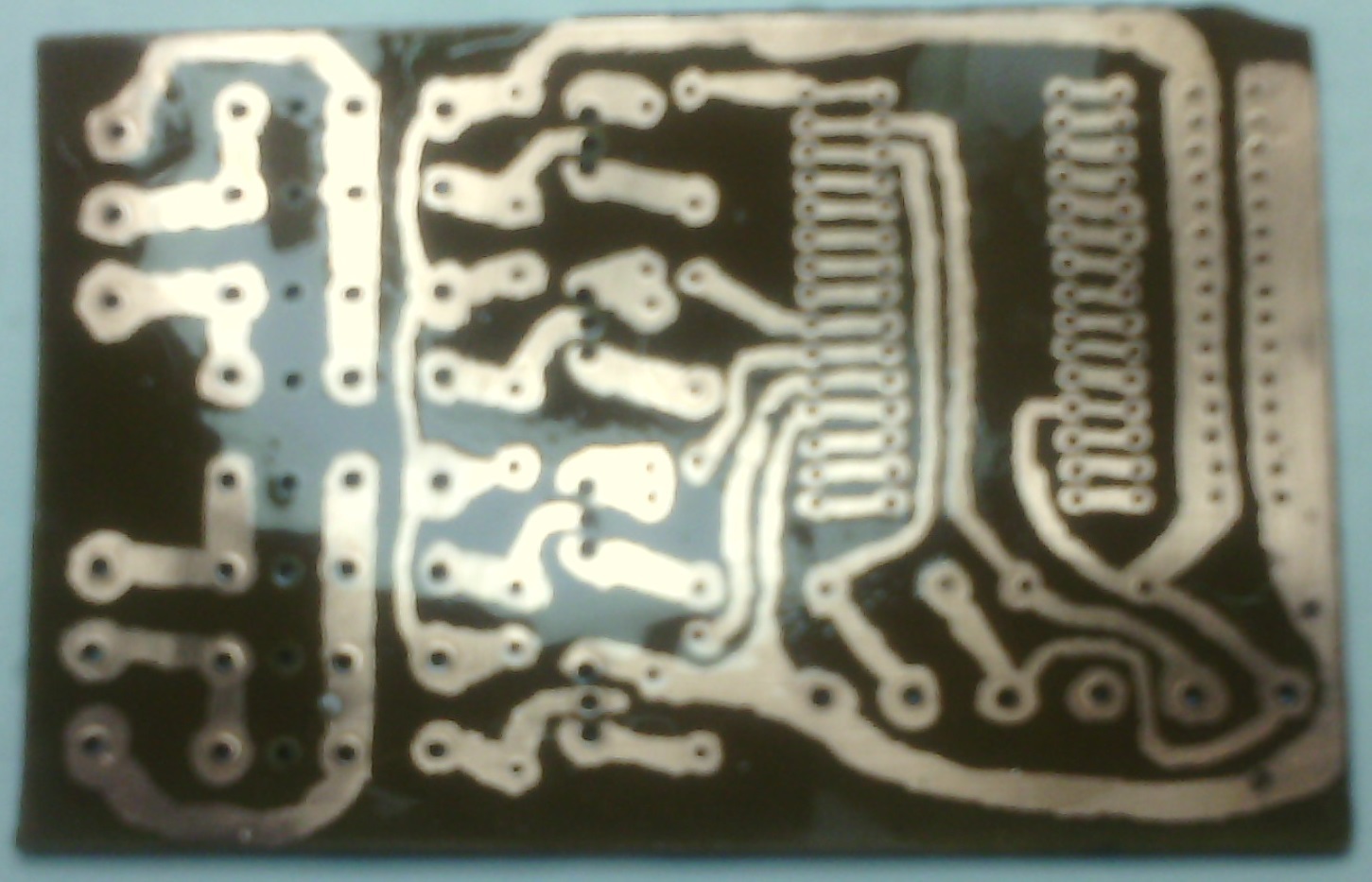
There was no iron and special paper for the LUT technology, so I had to remember my childhood and paint the boards with pens with varnish ejected from the cleaning woman.
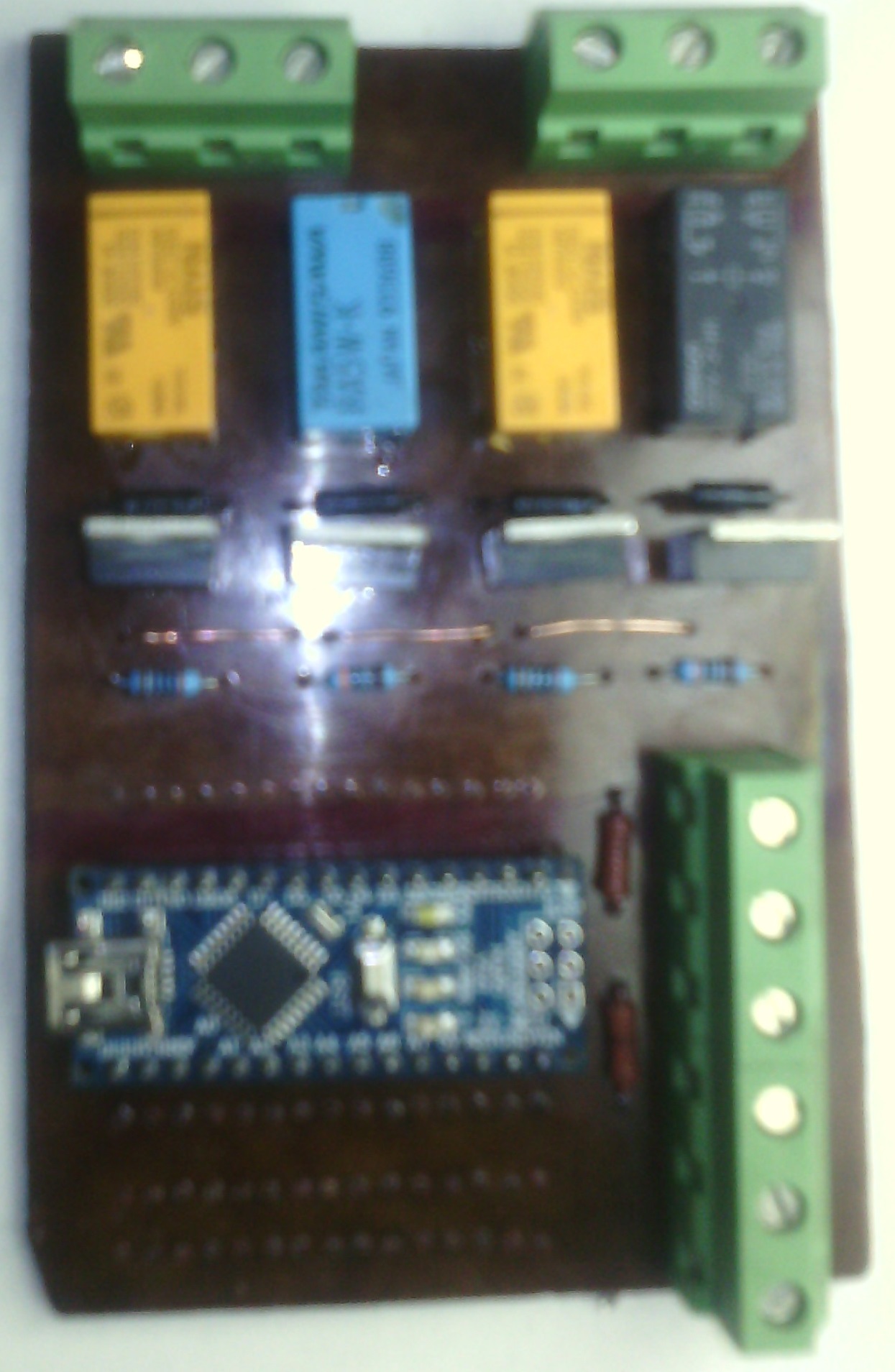
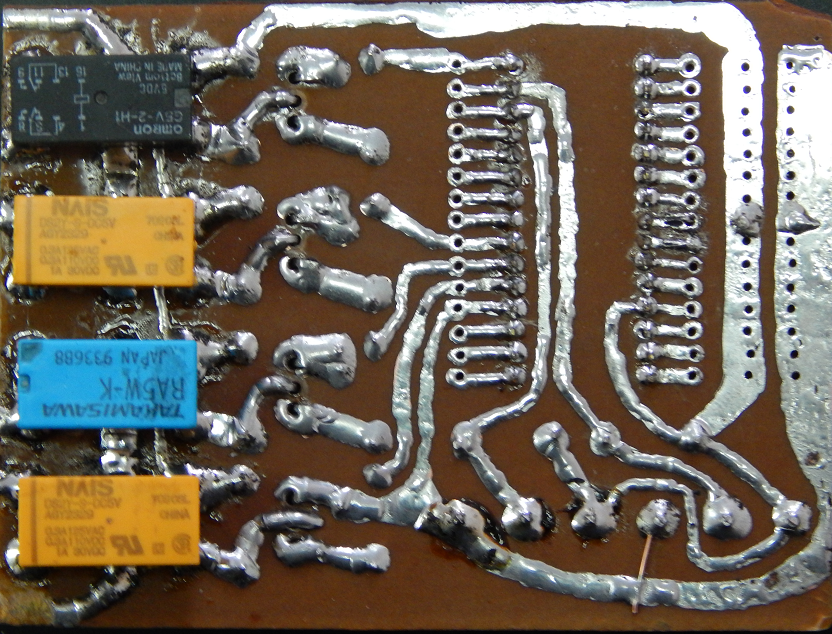
After the initial assembly and casting of the test sketch, the first problems arose. First, the relays refused to work, although 5 volts came to the coils. Before installing on the board, I naturally checked the resistance of the coils and applied power to them with a test of the drawdown. It turned out that the relay is very tricky. Although there are no diodes inside (the coils are called the same way in both directions), the polarity of the power supply on the coils plays a role for them. Most likely, they have a magnetized armature to reduce the response current. Because of this, relyushki moved to the other side of the board. After moving relyushek everything worked fine.

Then the final firmware was developed for the board.
Project in FLProg .
To sketch
#include <Wire.h> #include <OneWire.h> #include <LiquidCrystal_I2C.h> #include <EEPROM.h> #include "DHT.h" LiquidCrystal_I2C _lcd1(0x3F, 20, 4); int _dispTempLength1=0; boolean _isNeedClearDisp1; byte _d18x2x1Addr[8]={0x28, 0xFF, 0x11, 0x94, 0x3C, 0x4, 0x0, 0x48}; DHT _dht1(11, DHT22); OneWire _ow10(10); bool _gtv1 = 0; bool _gtv3 = 0; bool _gtv4 = 0; bool _gtv5 = 0; int _gtv2 = 23; int _gtv6 = 27; int _gtv7 = 30; int _gtv8 = 35; int _gtv9 = 0; bool _gtv10 = 0; String _gtv11 = "_C"; bool _gtv12 = 0; bool _gtv13 = 0; float _gtv14 = 0; float _gtv15 = 0; bool _gtv16 = 0; int _gtv17 = 10; bool _gtv18 = 0; bool _gtv19 = 0; bool _gtv20 = 0; bool _gtv21 = 0; bool _gtv22 = 0; bool _gtv23 = 0; bool _gtv24 = 0; bool _gtv25 = 0; bool _gtv26 = 0; bool _gtv27 = 0; bool _gtv28 = 0; bool _trgrt9 = 0; bool _trgrt9I = 0; bool _bounse1S = 0; bool _bounse1O = 0; unsigned long _bounse1P = 0UL; bool _trgrt4 = 0; bool _trgrt4I = 0; bool _bounse2S = 0; bool _bounse2O = 0; unsigned long _bounse2P = 0UL; bool _trgrt5 = 0; bool _trgrt5I = 0; bool _bounse3S = 0; bool _bounse3O = 0; unsigned long _bounse3P = 0UL; bool _trgrt8 = 0; bool _trgrt8I = 0; bool _count1I = 0; int _count1P = 0; bool _tim1I = 0; bool _tim1O = 0; unsigned long _tim1P = 0UL; bool _trgrt1 = 0; bool _trgrt1I = 0; bool _trgrt2 = 0; bool _trgrt2I = 0; bool _trgrt3 = 0; bool _trgrt3I = 0; int _disp1oldLength = 0; String _mux1; int _disp3oldLength = 0; int _disp4oldLength = 0; int _disp5oldLength = 0; int _disp6oldLength = 0; int _disp7oldLength = 0; String _swi2; String _swi3; int _disp2oldLength = 0; String _mux2; int _disp8oldLength = 0; int _disp9oldLength = 0; int _disp10oldLength = 0; int _disp11oldLength = 0; int _disp12oldLength = 0; String _swi4; String _swi5; bool _trgrt10 = 0; bool _trgrt10I = 0; bool _trgrt11 = 0; bool _trgrt11I = 0; bool _trgrt12 = 0; bool _trgrt12I = 0; bool _trgrt13 = 0; bool _trgrt13I = 0; unsigned long _d18x2x1Tti = 0UL; float _d18x2x1O = 0.00; unsigned long _dht1Tti = 0UL; float _dht1t = 0.00; float _dht1h = 0.00; bool _trgr1 = 0; bool _trgr2 = 0; bool _trgrt6 = 0; bool _trgrt6I = 0; bool _trgr3 = 0; bool _trgr4 = 0; bool _trgrt7 = 0; bool _trgrt7I = 0; bool _trgr5 = 0; bool _pzs1OES = 0; int _pzs1OFS = 0; bool _gen1I = 0; bool _gen1O = 0; unsigned long _gen1P = 0UL; int _swi1; bool _D1B1 = 0; bool _gen2I = 0; bool _gen2O = 0; unsigned long _gen2P = 0UL; String _swi6; int _disp13oldLength = 0; bool _SEEPR1OSN = 0; bool _SEEPR2OSN = 0; bool _SEEPR3OSN = 0; bool _SEEPR4OSN = 0; void setup() { Wire.begin(); pinMode(12, OUTPUT); pinMode(4, OUTPUT); pinMode(3, OUTPUT); pinMode(2, OUTPUT); _lcd1.init(); _lcd1.noBacklight(); _dht1.begin(); } void loop() {if(_isTimer(_dht1Tti, 6000)) { _dht1Tti = millis(); float tempDht11; tempDht11 = _dht1.readTemperature(); if (!(isnan(tempDht11))){_dht1t=tempDht11; } }if (_isNeedClearDisp1) {_lcd1.clear(); _isNeedClearDisp1= 0;} if (1) { if (_trgrt9I) { _trgrt9 = 0;} else {_trgrt9 = 1; _trgrt9I = 1;} } else {_trgrt9 = 0; _trgrt9I = 0;}; if (_trgrt9) { _gtv6 = (EEPROMReadInt(0)); } if (_trgrt9) { _gtv7 = (EEPROMReadInt(2)); } if (_trgrt9) { _gtv2 = (EEPROMReadInt(4)); } if (_trgrt9) { _gtv8 = (EEPROMReadInt(6)); } bool _bounceTmp1 = ! (( (analogRead (3))) > (500)); if (_bounse1S) { if (millis() >= (_bounse1P + 40)) {_bounse1O= _bounceTmp1; _bounse1S=0;} } else { if (_bounceTmp1 != _bounse1O ) {_bounse1S=1; _bounse1P = millis();} } if (_bounse1O) { if (_trgrt4I) { _trgrt4 = 0;} else {_trgrt4 = 1; _trgrt4I = 1;} } else {_trgrt4 = 0; _trgrt4I = 0;}; _gtv3 = _bounse1O; _gtv12 = (_trgrt4) && (!(_gtv20)) ; bool _bounceTmp2 = ! (( (analogRead (2))) > (500)); if (_bounse2S) { if (millis() >= (_bounse2P + 40)) {_bounse2O= _bounceTmp2; _bounse2S=0;} } else { if (_bounceTmp2 != _bounse2O ) {_bounse2S=1; _bounse2P = millis();} } if (_bounse2O) { if (_trgrt5I) { _trgrt5 = 0;} else {_trgrt5 = 1; _trgrt5I = 1;} } else {_trgrt5 = 0; _trgrt5I = 0;}; _gtv4 = _bounse2O; _gtv13 = (_trgrt5) && (!(_gtv20)) ; bool _bounceTmp3 = ! (( (analogRead (1))) > (500)); if (_bounse3S) { if (millis() >= (_bounse3P + 40)) {_bounse3O= _bounceTmp3; _bounse3S=0;} } else { if (_bounceTmp3 != _bounse3O ) {_bounse3S=1; _bounse3P = millis();} } if (_bounse3O) { if (_trgrt8I) { _trgrt8 = 0;} else {_trgrt8 = 1; _trgrt8I = 1;} } else {_trgrt8 = 0; _trgrt8I = 0;}; _gtv5 = _bounse3O; _gtv19 = (_trgrt8) && (!(_gtv20)) ; if (_gtv19) { if (! _count1I) { _count1P = _count1P+1; _count1I = 1; } } else { _count1I=0; } if (_count1P < 0 ) _count1P = 0; if ( (_gtv1) || (_gtv10) ) _count1P = 0; if (_gtv5) { if (_trgrt1I) { _trgrt1 = 0;} else {_trgrt1 = 1; _trgrt1I = 1;} } else {_trgrt1 = 0; _trgrt1I = 0;}; if (_gtv3) { if (_trgrt2I) { _trgrt2 = 0;} else {_trgrt2 = 1; _trgrt2I = 1;} } else {_trgrt2 = 0; _trgrt2I = 0;}; if (_gtv4) { if (_trgrt3I) { _trgrt3 = 0;} else {_trgrt3 = 1; _trgrt3I = 1;} } else {_trgrt3 = 0; _trgrt3I = 0;}; if ( ((_count1P) > (0)) && ((! (_trgrt1) || (_trgrt2) || (_trgrt3) )) ) { if (_tim1I) { if ( _isTimer(_tim1P, 60000)) _tim1O = 1; } else { _tim1I = 1; _tim1P = millis(); } } else { _tim1O = 0; _tim1I = 0; } _gtv9 = _count1P; _gtv1 = _count1P >= 5; _gtv10 = _tim1O; if((_gtv9) == 0) {_mux1 = String("Terst");} if((_gtv9) == 1) {_mux1 = String("Value Off");} if((_gtv9) == 2) {_mux1 = String("Value 1 On");} if((_gtv9) == 3) {_mux1 = String("Value 2 On");} if((_gtv9) == 4) {_mux1 = String("Value Alarm");} if ((_gtv9) > (0)) { _dispTempLength1 = ((_mux1)).length(); if (_disp1oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;} _disp1oldLength = _dispTempLength1; _lcd1.setCursor(int((20 - _dispTempLength1)/2), 0); _lcd1.print((_mux1)); } else { if (_disp1oldLength > 0) {_isNeedClearDisp1 = 1; _disp1oldLength = 0;} } if ((0) == (_gtv9)) { _dispTempLength1 = (String("SU T:")).length(); if (_disp3oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;} _disp3oldLength = _dispTempLength1; _lcd1.setCursor(0, 0); _lcd1.print(String("SU T:")); } else { if (_disp3oldLength > 0) {_isNeedClearDisp1 = 1; _disp3oldLength = 0;} } if ((0) == (_gtv9)) { _dispTempLength1 = ((( _floatToStringWitRaz(_gtv14,1)))).length(); if (_disp4oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;} _disp4oldLength = _dispTempLength1; _lcd1.setCursor(5, 0); _lcd1.print((( _floatToStringWitRaz(_gtv14,1)))); } else { if (_disp4oldLength > 0) {_isNeedClearDisp1 = 1; _disp4oldLength = 0;} } if ((0) == (_gtv9)) { _dispTempLength1 = (String("C")).length(); if (_disp5oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;} _disp5oldLength = _dispTempLength1; _lcd1.setCursor(9, 0); _lcd1.print(String("C")); } else { if (_disp5oldLength > 0) {_isNeedClearDisp1 = 1; _disp5oldLength = 0;} } if(_gtv21) {_swi2=String("*");} else {_swi2=String("-");} if ((0) == (_gtv9)) { _dispTempLength1 = ((_swi2)).length(); if (_disp6oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;} _disp6oldLength = _dispTempLength1; _lcd1.setCursor(11, 0); _lcd1.print((_swi2)); } else { if (_disp6oldLength > 0) {_isNeedClearDisp1 = 1; _disp6oldLength = 0;} } if(_gtv22) {_swi3=String("*");} else {_swi3=String("-");} if ((0) == (_gtv9)) { _dispTempLength1 = ((_swi3)).length(); if (_disp7oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;} _disp7oldLength = _dispTempLength1; _lcd1.setCursor(13, 0); _lcd1.print((_swi3)); } else { if (_disp7oldLength > 0) {_isNeedClearDisp1 = 1; _disp7oldLength = 0;} } if((_gtv9) == 0) {_mux2 = String("test");} if((_gtv9) == 1) {_mux2 = (((String(_gtv2))) + (_gtv11));} if((_gtv9) == 2) {_mux2 = (((String(_gtv6))) + (_gtv11));} if((_gtv9) == 3) {_mux2 = (((String(_gtv7))) + (_gtv11));} if((_gtv9) == 4) {_mux2 = (((String(_gtv8))) + (_gtv11));} if ((_gtv9) > (0)) { _dispTempLength1 = ((_mux2)).length(); if (_disp2oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;} _disp2oldLength = _dispTempLength1; _lcd1.setCursor(int((20 - _dispTempLength1)/2), 1); _lcd1.print((_mux2)); } else { if (_disp2oldLength > 0) {_isNeedClearDisp1 = 1; _disp2oldLength = 0;} } if ((0) == (_gtv9)) { _dispTempLength1 = (String("CU T:")).length(); if (_disp8oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;} _disp8oldLength = _dispTempLength1; _lcd1.setCursor(0, 1); _lcd1.print(String("CU T:")); } else { if (_disp8oldLength > 0) {_isNeedClearDisp1 = 1; _disp8oldLength = 0;} } if ((0) == (_gtv9)) { _dispTempLength1 = ((( _floatToStringWitRaz(_gtv15,1)))).length(); if (_disp9oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;} _disp9oldLength = _dispTempLength1; _lcd1.setCursor(5, 1); _lcd1.print((( _floatToStringWitRaz(_gtv15,1)))); } else { if (_disp9oldLength > 0) {_isNeedClearDisp1 = 1; _disp9oldLength = 0;} } if ((0) == (_gtv9)) { _dispTempLength1 = (String("C")).length(); if (_disp10oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;} _disp10oldLength = _dispTempLength1; _lcd1.setCursor(9, 1); _lcd1.print(String("C")); } else { if (_disp10oldLength > 0) {_isNeedClearDisp1 = 1; _disp10oldLength = 0;} } if(_gtv23) {_swi4=String("*");} else {_swi4=String("-");} if ((0) == (_gtv9)) { _dispTempLength1 = ((_swi4)).length(); if (_disp11oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;} _disp11oldLength = _dispTempLength1; _lcd1.setCursor(11, 1); _lcd1.print((_swi4)); } else { if (_disp11oldLength > 0) {_isNeedClearDisp1 = 1; _disp11oldLength = 0;} } if(_gtv24) {_swi5=String("*");} else {_swi5=String("-");} if ((0) == (_gtv9)) { _dispTempLength1 = ((_swi5)).length(); if (_disp12oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;} _disp12oldLength = _dispTempLength1; _lcd1.setCursor(13, 1); _lcd1.print((_swi5)); } else { if (_disp12oldLength > 0) {_isNeedClearDisp1 = 1; _disp12oldLength = 0;} } if ( (_gtv5) && (_gtv3) && (_gtv4) ) { if (_trgrt10I) { _trgrt10 = 0;} else {_trgrt10 = 1; _trgrt10I = 1;} } else {_trgrt10 = 0; _trgrt10I = 0;}; if ( (_gtv12) && ((_gtv9) == (1)) ) { _gtv2 = (_gtv2)+(1); } if ( ((_gtv9) == (1)) && (_gtv13) ) { _gtv2 = (_gtv2)-(1); } if (_trgrt10) { _gtv2 = 25; } _gtv25 = ( (_gtv12) && ((_gtv9) == (1)) ) || ( ((_gtv9) == (1)) && (_gtv13) ) || (_trgrt10) ; if ( (_gtv5) && (_gtv3) && (_gtv4) ) { if (_trgrt11I) { _trgrt11 = 0;} else {_trgrt11 = 1; _trgrt11I = 1;} } else {_trgrt11 = 0; _trgrt11I = 0;}; if ( (_gtv12) && ((_gtv9) == (2)) ) { _gtv6 = (_gtv6)+(1); } if ( ((_gtv9) == (2)) && (_gtv13) ) { _gtv6 = (_gtv6)-(1); } if (_trgrt11) { _gtv6 = 27; } _gtv26 = ( (_gtv12) && ((_gtv9) == (2)) ) || ( ((_gtv9) == (2)) && (_gtv13) ) || (_trgrt11) ; if ( (_gtv5) && (_gtv3) && (_gtv4) ) { if (_trgrt12I) { _trgrt12 = 0;} else {_trgrt12 = 1; _trgrt12I = 1;} } else {_trgrt12 = 0; _trgrt12I = 0;}; if ( (_gtv12) && ((_gtv9) == (3)) ) { _gtv7 = (_gtv7)+(1); } if ( ((_gtv9) == (3)) && (_gtv13) ) { _gtv7 = (_gtv7)-(1); } if (_trgrt12) { _gtv7 = 30; } _gtv27 = ( (_gtv12) && ((_gtv9) == (3)) ) || ( ((_gtv9) == (3)) && (_gtv13) ) || (_trgrt12) ; if ( (_gtv5) && (_gtv3) && (_gtv4) ) { if (_trgrt13I) { _trgrt13 = 0;} else {_trgrt13 = 1; _trgrt13I = 1;} } else {_trgrt13 = 0; _trgrt13I = 0;}; if ( (_gtv12) && ((_gtv9) == (4)) ) { _gtv8 = (_gtv8)+(1); } if ( ((_gtv9) == (4)) && (_gtv13) ) { _gtv8 = (_gtv8)-(1); } if (_trgrt13) { _gtv8 = 35; } _gtv28 = ( (_gtv12) && ((_gtv9) == (4)) ) || ( ((_gtv9) == (4)) && (_gtv13) ) || (_trgrt13) ; if(_isTimer(_d18x2x1Tti, 5000)) { _d18x2x1Tti = millis(); _d18x2x1O= _readDS18_ow10(_d18x2x1Addr, 0);} _gtv14 = (_d18x2x1O); _gtv15 = _dht1t; if(((int((_gtv14)*(_gtv17)))) < ((_gtv2)*(_gtv17))) _trgr1 = 0; if(((int((_gtv14)*(_gtv17)))) > ((_gtv6)*(_gtv17))) _trgr1 = 1; if(((int((_gtv14)*(_gtv17)))) < ((_gtv2)*(_gtv17))) _trgr2 = 0; if(((int((_gtv14)*(_gtv17)))) > ((_gtv7)*(_gtv17))) _trgr2 = 1; if (((int((_gtv14)*(_gtv17)))) > ((_gtv17)*(_gtv8))) { if (_trgrt6I) { _trgrt6 = 0;} else {_trgrt6 = 1; _trgrt6I = 1;} } else {_trgrt6 = 0; _trgrt6I = 0;}; if(((int((_gtv17)*(_gtv15)))) < ((_gtv2)*(_gtv17))) _trgr3 = 0; if(((int((_gtv17)*(_gtv15)))) > ((_gtv6)*(_gtv17))) _trgr3 = 1; if(((int((_gtv17)*(_gtv15)))) < ((_gtv2)*(_gtv17))) _trgr4 = 0; if(((int((_gtv17)*(_gtv15)))) > ((_gtv7)*(_gtv17))) _trgr4 = 1; if (((int((_gtv17)*(_gtv15)))) > ((_gtv17)*(_gtv8))) { if (_trgrt7I) { _trgrt7 = 0;} else {_trgrt7 = 1; _trgrt7I = 1;} } else {_trgrt7 = 0; _trgrt7I = 0;}; _gtv16 = _trgrt6; _gtv21 = _trgr1; digitalWrite(12, _trgr1); digitalWrite(3, _trgr3); _gtv18 = _trgrt7; _gtv23 = _trgr3; _gtv22 = _trgr2; digitalWrite(4, _trgr2); digitalWrite(2, _trgr4); _gtv24 = _trgr4; if( (_gtv5) || (_gtv3) || (_gtv4) ) _trgr5 = 0; if( (_gtv16) || (_gtv18) ) _trgr5 = 1; if (_trgr5) { if (! _gen1I) { _gen1I = 1; _gen1O = 1; _gen1P = millis(); } } else { _gen1I = 0 ; _gen1O= 0; } if (_gen1I ) { if ( _isTimer ( _gen1P , 500 )) { _gen1P = millis(); _gen1O = ! _gen1O; } } if( (!(_trgr5)) || (_gen1O) ) {if(! _D1B1){_lcd1.backlight(); _D1B1=1; }} else {if(_D1B1){_lcd1.noBacklight(); _D1B1=0; }} if(_gen1O) {_swi1=3000;} else {_swi1=2500;} if(_trgr5) {if((!_pzs1OES) || (_swi1 != _pzs1OFS)){ tone(13, (_swi1)); _pzs1OES =1;_pzs1OFS = _swi1;}} else {if(_pzs1OES){noTone(13); _pzs1OES =0; }} _gtv20 = _trgr5; if (1) { if (! _gen2I) { _gen2I = 1; _gen2O = 1; _gen2P = millis(); } } else { _gen2I = 0 ; _gen2O= 0; } if (_gen2I ) { if ( _isTimer ( _gen2P , 1000 )) { _gen2P = millis(); _gen2O = ! _gen2O; } } if(_gen2O) {_swi6=String("----");} else {_swi6=String("****");} if (1) { _dispTempLength1 = ((_swi6)).length(); if (_disp13oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;} _disp13oldLength = _dispTempLength1; _lcd1.setCursor(int((20 - _dispTempLength1)/2), 2); _lcd1.print((_swi6)); } else { if (_disp13oldLength > 0) {_isNeedClearDisp1 = 1; _disp13oldLength = 0;} } if(_gtv26){ if(!_SEEPR1OSN){ EEPROMWriteInt(0, _gtv6); _SEEPR1OSN=1;} }else{ if(_SEEPR1OSN){_SEEPR1OSN=0;}} if(_gtv27){ if(!_SEEPR2OSN){ EEPROMWriteInt(2, _gtv7); _SEEPR2OSN=1;} }else{ if(_SEEPR2OSN){_SEEPR2OSN=0;}} if(_gtv25){ if(!_SEEPR3OSN){ EEPROMWriteInt(4, _gtv2); _SEEPR3OSN=1;} }else{ if(_SEEPR3OSN){_SEEPR3OSN=0;}} if(_gtv28){ if(!_SEEPR4OSN){ EEPROMWriteInt(6, _gtv8); _SEEPR4OSN=1;} }else{ if(_SEEPR4OSN){_SEEPR4OSN=0;}} } bool _isTimer(unsigned long startTime, unsigned long period ) { unsigned long endTime; endTime = startTime+period; return (millis() >= endTime); } String _floatToStringWitRaz(float value, int raz) { float tv; int ti = int(value); String ts = String(ti); if (raz == 0) { return ts; } ts += "."; float tf = abs(value - ti); for (int i = 1; i <= raz; i++ ) { tv = tf * 10; ti = int(tv); ts += String(ti); tf = (tv - ti); } return ts; } float _convertDS18x2xData(byte type_s, byte data[12]) { int16_t raw = (data[1] << 8) | data[0]; if (type_s) { raw = raw << 3; if (data[7] == 0x10) { raw = (raw & 0xFFF0) + 12 - data[6]; } } else { byte cfg = (data[4] & 0x60); if (cfg == 0x00) raw = raw & ~7; else if (cfg == 0x20) raw = raw & ~3; else if (cfg == 0x40) raw = raw & ~1; } return (float)raw / 16.0; } float _readDS18_ow10(byte addr[8], byte type_s) { byte data[12]; byte i; _ow10.reset(); _ow10.select(addr); _ow10.write(0xBE); for ( i = 0; i < 9; i++) { data[i] = _ow10.read();} _ow10.reset(); _ow10.select(addr); _ow10.write(0x44, 1); return _convertDS18x2xData(type_s, data);}int EEPROMReadInt(int p_address) { byte lowByte = EEPROM.read(p_address); byte highByte = EEPROM.read(p_address + 1); return ((lowByte << 0) & 0xFF) + ((highByte << 8) & 0xFF00); } void EEPROMWriteInt(int p_address, int p_value) { byte lowByte = ((p_value >> 0) & 0xFF); byte highByte = ((p_value >> 8) & 0xFF); EEPROM.write(p_address, lowByte); EEPROM.write(p_address + 1, highByte); } How the system works.
When power is supplied to the controller, the settings of thresholds for switching on the steps of cabinet fans and alarm signal are read from the EEPROM.
Every 5 seconds data from the sensors is read and displayed on the display. When the temperature in the cabinet of the first threshold is exceeded, the first fan turns on, the second threshold turns on the second, and when the emergency temperature threshold is exceeded, a two-tone audible alarm turns on and the display backlight blinks. Accident is acknowledged by pressing any of the buttons. When the temperature drops below the set point for switching off the fans, both fans stop.
Each time the “Menu” button is pressed, all settings are displayed in succession on the display screen. Each setting can be changed with the “Add” and “Subtract” buttons. In this case, the new setpoint value is immediately recorded in the EEPROM.
If within 1 minute no action is taken with the buttons, a transition to the main temperature indication screen occurs.
When pressing three buttons at once, all settings are reset to the initial values recorded in the program. This is necessary when the controller is first started, when there are unpredictable values in the EEPROM. I, for example, had an emergency temperature of 387 degrees, and I would be very tired of dumping it to 35 degrees by pressing the “Turn off” button.
Starting the system on the table and warming up the sensors with a hair dryer showed the program's working capacity.

Sensors were installed and cable runs to the cabinets.
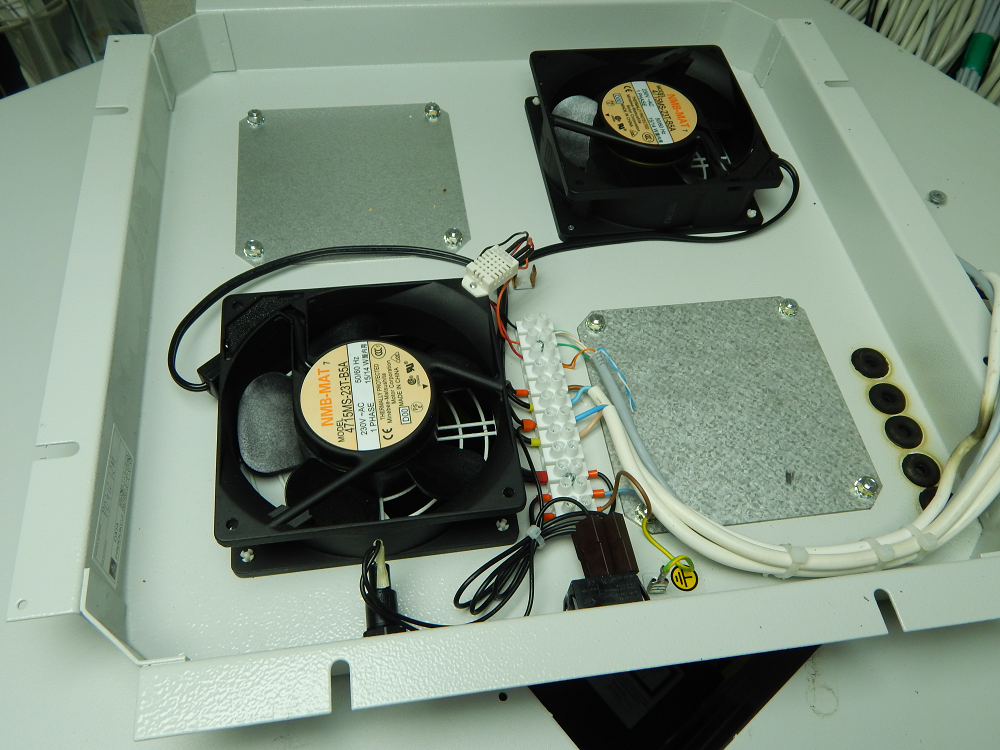

During trial operation, the following subtleties were discovered.
First of all, in no case should cables be laid to the sensors along with cables to the fans. I made this mistake, hoping for small currents of fans. As a result, from time to time when the fan stopped, the controller hung. After the cables were separated from each other, these hangs stopped. Perhaps it would also help - the use of shielded wires to the sensors, but those were not available.
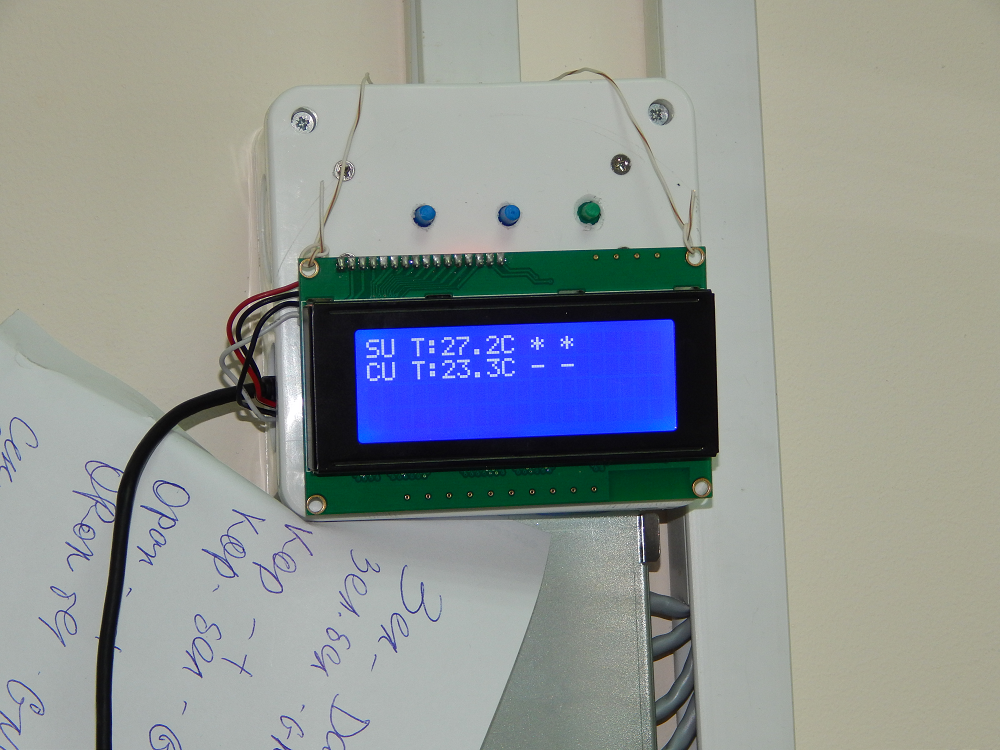
Please do not pay attention to the original display mount, but I found it too bold to put the four-line display on a permanent basis, and on the next watch I will replace it with a two-line one.
Currently, the system works for the third week without freezing and failures 24/7.
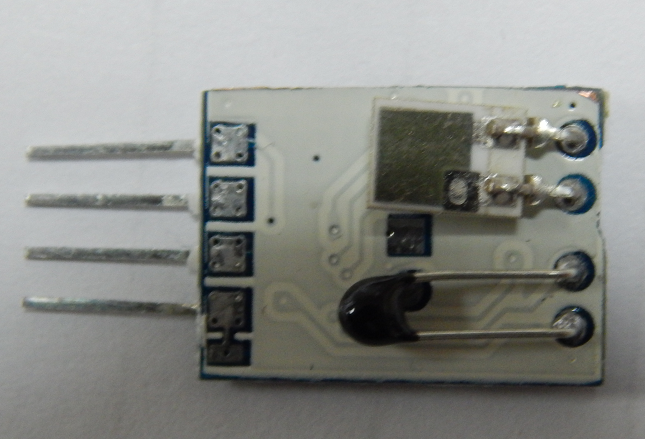
Now a little geek porn. I could not resist and gutted the burned-down DHT-22 sensor. Inside he was very smart.
Source: https://habr.com/ru/post/244083/
All Articles