Ar.Drone 2: half a year of flights
Hi, Habr!
Recently, I began to get involved in flights on the AR.Drone 2.0 quadcopter, namely from the moment my friends gave it to me for my birthday. Although there is no time for competitions and “pokatushki” with other lovers, it is quite interesting to fly in the same office under the cheerful exclamations of colleagues. Yes, and you can experiment - with additional modules and mods.
In this post I wrote about my own operating experience and tried to collect a list of tips. If you have a similar experience - write about it in the comments so that you can make the most complete impression for novice pilots. And those who are planning to buy a copter have a balanced impression of the gadget.
')

In the table, I collected all the features of Ar.Drone, identified for six months of flights
For those who are not particularly interested in this topic. The quadcopter is positioned by the manufacturer as an “Augmented Reality Drone” - Augmented Reality Drone. It runs under the Linux operating system, and you can manage it from Android and iOS devices. In my case, this is the iPhone 5S. The API of the drone is open, which allows you to finish it, if necessary, to participate in various competitions.
But about it on Habré wrote repeatedly, so read this review is better.
For six months, I identified several shortcomings, some of which can be solved by the purchase of additional parts or devices, and it remains only to put up with some. This is the experience I want to share with you.
The main problem of all modern flying gadgets is a small time without recharging. I wish that the quadcopter could fly for hours, but this is currently not possible. The standard 1000 mAh battery lasts just 9 minutes with video recording turned on. Initially, at 30% charge, software prohibits flips. At 15%, it starts yelling, and near zero, the drone simply forcibly decreases and muffles the engines after touching the ground. For all the time I never managed to leave the city to fly in open space, so I have to maneuver over the territory of the office center and parked cars. If you miss the charge level, you can lose the drone or scratch someone else's car.
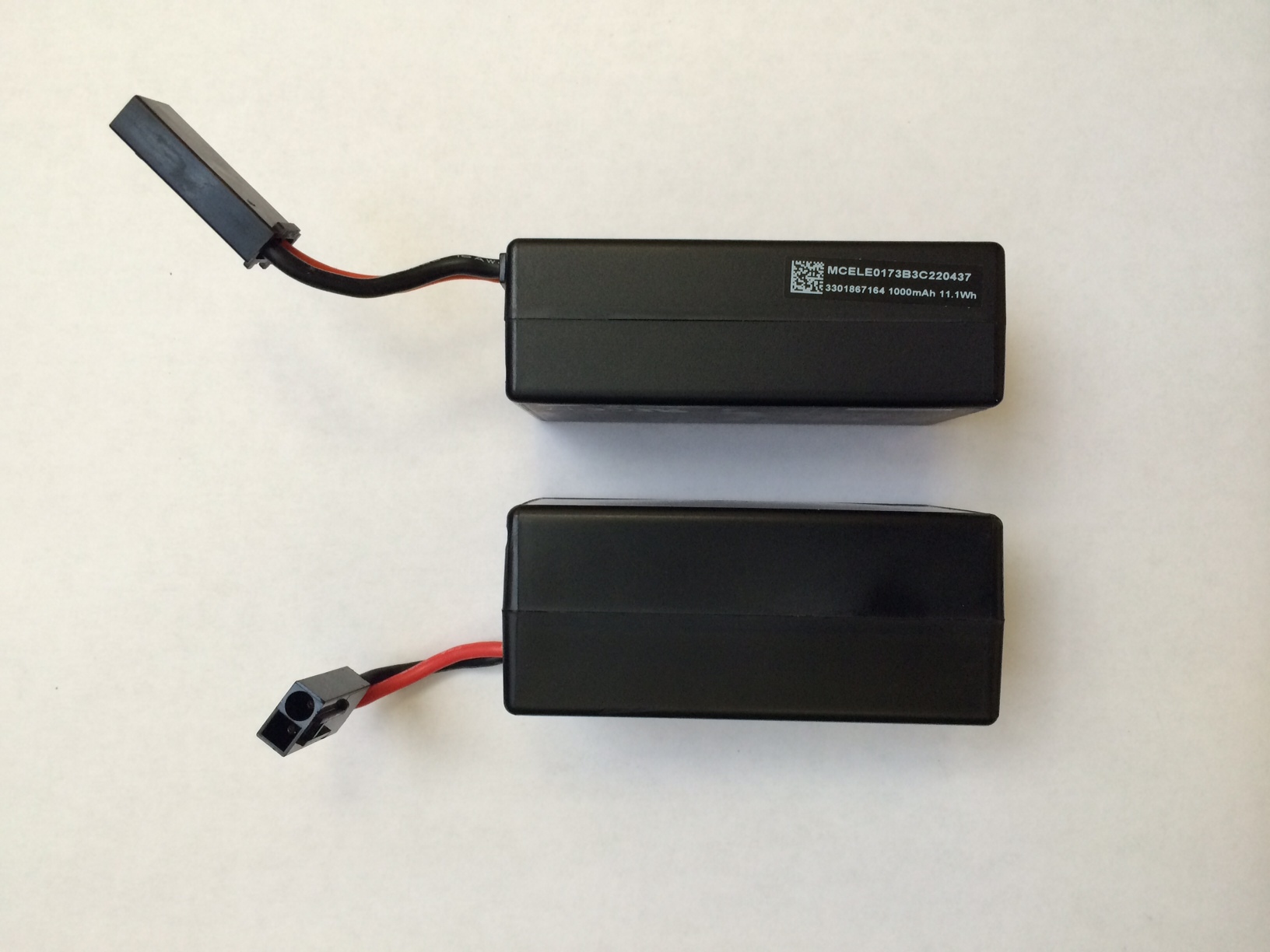
The problem of flight duration is solved by acquiring a 2000mAh battery, but larger capacity batteries are thicker and do not hold up well in a standard case. This regularly leads to problems in flight.

Batteries. Visible difference in thickness, which also was not originally envisaged. However, now the battery at 2000mAh is sold the same size as the regular one at 1000mAh.
Native gears on the screws do not differ in longevity, after accidents, they lose teeth and have to be changed. The wear of non-original gears happens quite quickly even in the mode of careful flights, but they are inexpensive and you can buy them immediately a dozen.

Moreover, in case of impact with a screw, the gears simply fail. Any collision during the flight is fraught with the fact that the teeth will be “eaten”.
First of all, I purchased several sets of spare gears, during the use of a total of 4 sets on my account.

Have you heard of the Dunning-Kruger effect? This is when you exaggerate your abilities. I am sure almost everyone experienced it for the first time when flying quadcopter. And almost all of them in any way dropped the quadcopter and beat it against the wall.
The following disadvantage comes out of this: with hard landings, you can break the frame, as they often write about. True, I failed to break it, but one of the “legs” flew off when it collided with a wall during a gust of wind. The cross remained intact. But it is better to foresee the possibility of breaking it down and buying a kit. In general, even in normal mode, the Ar.Drone has a very uncrowded automatic landing .
Photos of the lost "legs."

The protection of carbon gears was separately acquired by me and installed, which significantly increased the service life of the gears.

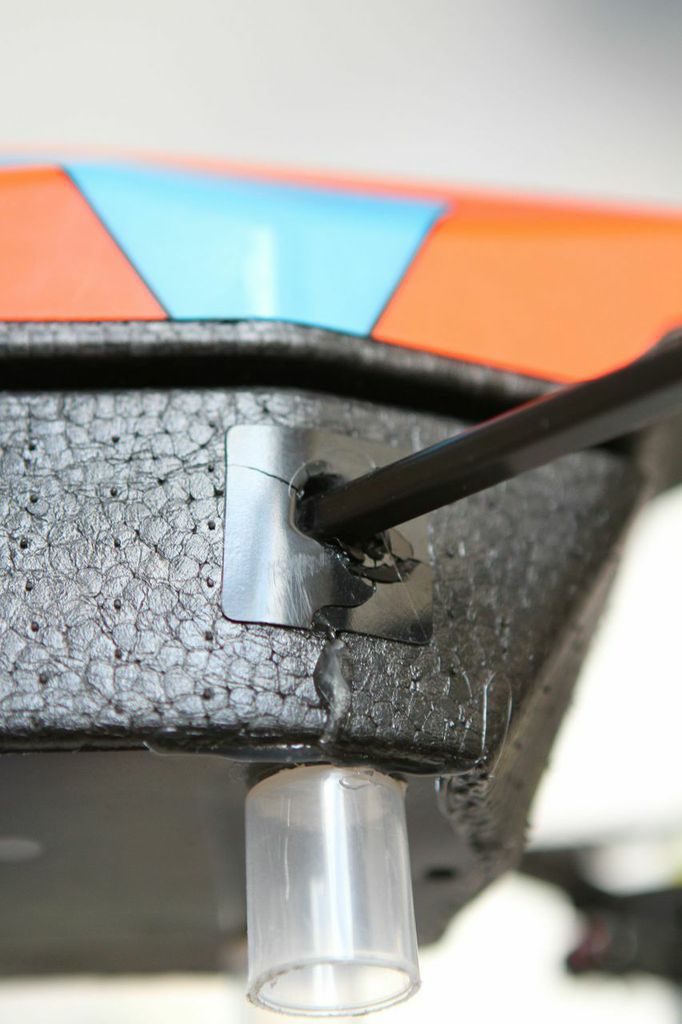
The real “leader” in repair is the casing for indoor flight. Regularly launching a compter in the office, since it appeared in my winter, every second of the flights ended in a light accident. I had to take glue in my hands.
This made me think about the need to find or to make the casing stronger. This is a plan for the future.
The casing for flying on the street is devoid of rims protecting the blades, it looks clearly steeper.
During the operation and he was seriously injured several times.

The lower part of the body is used constantly, so it also had to be strengthened.
Flight radius is another weak point. I flew with the iPhone 5S and 4S, and the flight radius was about 25 meters. In the case of the iPad 2, the radius reached 50 meters, but still, you will not accelerate too much.
Management under iOS differs in low sensitivity and big response time. And if during the flight someone calls you, the quadcopter will hang in the air, and if you decide to chat for a couple of minutes, the drone will simply land on the same point over which it was caught by the bell. Even if there is a lake infested with crocodiles.
In such a case it would be cool to have an auto return to the take-off location.
In addition, there is another inconvenience with management. Now in the App Store there are a lot of applications for managing the drone, they are all very similar in design, and when you start one of the applications, it can offer to launch another one. As a result, on my phone there are 5 applications for Ar.Drone and I still don’t really understand what they are for? This happened because the manufacturer opened the API, and now everyone can write and publish their application for a flight on this quadcopter.
Suddenly, regular propellers work fine. Sometimes they write that it is a consumable material, and it is better to buy them in batches.
In my case, everything turned out differently: I bought carbon propellers, but eventually I returned to my native propellers and continued to fly with them. The view is already shabby, but they fly normally.
Carbon propellers worked for only a few days, after the next accident the thread of the sleeves was torn off, and new sleeves and bolts were not found separately from the screws.
The GPS module is designed to force your quadrocopter to fly in the right directions autonomously. For example, monitor the work of prisoners on the plantations. I fell for it and wanted to test a return to the take-off point, since I only fly in the city and most often over the roofs of the neighboring offices. And you don't want to lose your favorite gift.
This module still seems to me a meaningless and merciless extension. Native software for flight by GPS looks extremely miserable and inconvenient, at least on iOS. I didn’t manage to fly on GPS yet for what reason: the placement of a regular usb connector in Ar.Drone 2.0 is convenient for installing a USB flash drive, but it’s extremely inconvenient to connect a module. You just have to put the module in the inside, it hangs loose there and it interferes with the flights, you cannot make flips.

Once during a flip, under a sudden gust of wind, the battery together with the GPS module fell out, opened the drone cover, which eventually led to a fall and serious injuries of the device.
Here, too, I would like to have another casing in which there would be room for a module.
After each accident or loss of communication, you need to open the drone cover, disconnect the power supply, and then you can work with the device again. It would be much more convenient to have a separate physical button for this purpose. This is not the most convenient procedure .
Although the quadcopter is able to lift the GoPro camera into the air, right after that it becomes not very easy to control it, it is turning from side to side from the slightest breeze. Therefore, I had to use a standard camera, the resolution is quite decent.
The bottom of the quadcopter is protected by a thin lid, which can peel off slightly and close the lower chamber. The device begins to think that there is an obstacle under it, and try to go around it, getting up to hell, knocking on walls, people and scaring the unhappy cats.
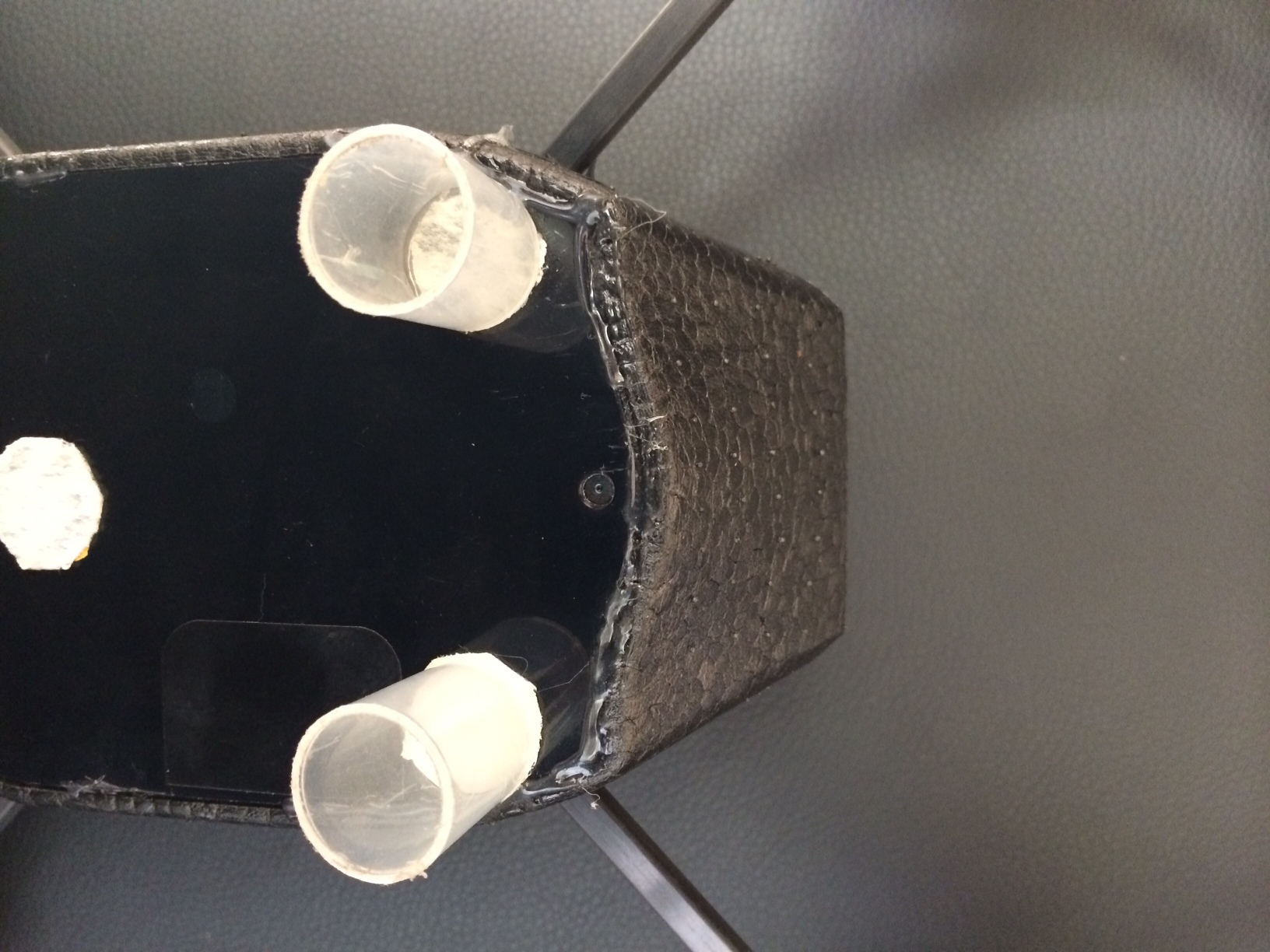
By the way, these two huge white things - caps from a bottle with a liquid for cleaning marker boards, after losing one of the supports, I had to invent something very quickly. Double-sided tape and ingenuity saved the situation.
Unlike large drones, there are gears, bushings and a shaft between the engine and propellers, and they cannot be lubricated for objective reasons. The bushing was replaced with a bearing to reduce noise. But after landing on the grass or on a muddy road, the gears will get up, as dust will stick to the grease. You just have to put up with the noise.

The photographs are yellow - native copper bushings, and steel - specially ordered micro-bearings. I'm not sure that this mod objectively reduced the noise, but the impressions of the work improved somewhat.
During the preparation of this post, we planned to shoot a cool video with beautiful Ar.Drone flights in a limited space. But the terrible happened: the drone began to behave inadequately - at first he attacked our lovely operator, having flown from the back, and later he was aiming at the cars parked nearby. Flights had to turn, and the video to collect from what happened.
A small bonus: a blonde crash test with quadrocopter eyes
After this accident, the drone began to go crazy, for example, he performed this circus number quite arbitrarily and without an operator’s command.
Despite all the stories described, I really liked Ar.Drone. This is a very cool toy for the money, which requires care and maintenance. Another accident only ignites interest, and the impressions of the flight are unforgettable. I will definitely repair my drone again and plan to fly more than once before the onset of winter. And I will also try to correct the existing problems, but I plan to tell about this another time.
Recently, I began to get involved in flights on the AR.Drone 2.0 quadcopter, namely from the moment my friends gave it to me for my birthday. Although there is no time for competitions and “pokatushki” with other lovers, it is quite interesting to fly in the same office under the cheerful exclamations of colleagues. Yes, and you can experiment - with additional modules and mods.
In this post I wrote about my own operating experience and tried to collect a list of tips. If you have a similar experience - write about it in the comments so that you can make the most complete impression for novice pilots. And those who are planning to buy a copter have a balanced impression of the gadget.
')
In the table, I collected all the features of Ar.Drone, identified for six months of flights
| Problem | Description | Decision |
|---|---|---|
| Flight time | 9 minutes on a standard battery | Buying a larger battery |
| Wear gears | During normal operation | Buying spare, several sets should always be on hand |
| Gear breakdown | In collisions and falls | Buying spare |
| Frame | With a hard landing can break the cross, and the "legs" can fly away when confronted with an obstacle during flight | Buying a set of crosses, etc. |
| Housing | The casing for the premises constantly breaks at the slightest collision, it is often injured by the screws themselves, which it must protect | Glue |
| Flight radius | 25 meters with iPhone 5, 50 meters with iPad 2 | You must use a router, an external antenna for the drone |
| Control | Many incomprehensible applications, and control from a smartphone is not very convenient | RC mod, the transition to the traditional remote for radio-controlled models |
| Propellers | Carbon ordered to live long after the first accident, fragile | Returned staff, but you need to have a couple of sets in stock |
| Installing a regular GPS module | Does not fit in the case | Make a new cover or modify the file |
| Power reset | After a fall or loss of connection, you must manually disconnect the battery | Output individual toggle switch |
| Small lifting capacity ness | With GoPro on board, the copter flies hard, the propellers get into the frame | For GoPro, you just need another copter |
| Peeling off the bottom cover | After several landings, the cover began to move down and block the lower chamber. | Make a new perspective, but for now saved an adhesive gun |
| Flight Noise | Designers have come up with too complicated transmission, it is fragile and rustling | Replacing the bushings on the bearings, but this has little effect on the noise, it remains only to accept |
Briefly about AR. Drone 2.0
For those who are not particularly interested in this topic. The quadcopter is positioned by the manufacturer as an “Augmented Reality Drone” - Augmented Reality Drone. It runs under the Linux operating system, and you can manage it from Android and iOS devices. In my case, this is the iPhone 5S. The API of the drone is open, which allows you to finish it, if necessary, to participate in various competitions.
But about it on Habré wrote repeatedly, so read this review is better.
Specifications
Processor: 1GHz ARM Cortex A8
Video Processor: 800 MHz DSP TMS320DMC64x
RAM: 1Gbps DDR2 RAM
Operating system: Linux 2.6.32
Motors: 4 x 14.5 W, 28500 RPM
Motor Controllers: 8 MIPS AVR CPU
Maximum speed: 18 km / h
Front camera: HD 720p
Camera on the bottom: QVGA 320x240
Regular battery: Lithium-polymer, 3 cells, 11,1V, 1000 mAh.
Video Processor: 800 MHz DSP TMS320DMC64x
RAM: 1Gbps DDR2 RAM
Operating system: Linux 2.6.32
Motors: 4 x 14.5 W, 28500 RPM
Motor Controllers: 8 MIPS AVR CPU
Maximum speed: 18 km / h
Front camera: HD 720p
Camera on the bottom: QVGA 320x240
Regular battery: Lithium-polymer, 3 cells, 11,1V, 1000 mAh.
For six months, I identified several shortcomings, some of which can be solved by the purchase of additional parts or devices, and it remains only to put up with some. This is the experience I want to share with you.
1. Flight time
The main problem of all modern flying gadgets is a small time without recharging. I wish that the quadcopter could fly for hours, but this is currently not possible. The standard 1000 mAh battery lasts just 9 minutes with video recording turned on. Initially, at 30% charge, software prohibits flips. At 15%, it starts yelling, and near zero, the drone simply forcibly decreases and muffles the engines after touching the ground. For all the time I never managed to leave the city to fly in open space, so I have to maneuver over the territory of the office center and parked cars. If you miss the charge level, you can lose the drone or scratch someone else's car.
The problem of flight duration is solved by acquiring a 2000mAh battery, but larger capacity batteries are thicker and do not hold up well in a standard case. This regularly leads to problems in flight.
Batteries. Visible difference in thickness, which also was not originally envisaged. However, now the battery at 2000mAh is sold the same size as the regular one at 1000mAh.
2. Wear gears
Native gears on the screws do not differ in longevity, after accidents, they lose teeth and have to be changed. The wear of non-original gears happens quite quickly even in the mode of careful flights, but they are inexpensive and you can buy them immediately a dozen.
3. Breakage gears
Moreover, in case of impact with a screw, the gears simply fail. Any collision during the flight is fraught with the fact that the teeth will be “eaten”.
First of all, I purchased several sets of spare gears, during the use of a total of 4 sets on my account.
4. Frame
Have you heard of the Dunning-Kruger effect? This is when you exaggerate your abilities. I am sure almost everyone experienced it for the first time when flying quadcopter. And almost all of them in any way dropped the quadcopter and beat it against the wall.
The following disadvantage comes out of this: with hard landings, you can break the frame, as they often write about. True, I failed to break it, but one of the “legs” flew off when it collided with a wall during a gust of wind. The cross remained intact. But it is better to foresee the possibility of breaking it down and buying a kit. In general, even in normal mode, the Ar.Drone has a very uncrowded automatic landing .
Photos of the lost "legs."
The protection of carbon gears was separately acquired by me and installed, which significantly increased the service life of the gears.
5. Housing
The real “leader” in repair is the casing for indoor flight. Regularly launching a compter in the office, since it appeared in my winter, every second of the flights ended in a light accident. I had to take glue in my hands.
This made me think about the need to find or to make the casing stronger. This is a plan for the future.
The casing for flying on the street is devoid of rims protecting the blades, it looks clearly steeper.
During the operation and he was seriously injured several times.
The lower part of the body is used constantly, so it also had to be strengthened.
6. Flight radius
Flight radius is another weak point. I flew with the iPhone 5S and 4S, and the flight radius was about 25 meters. In the case of the iPad 2, the radius reached 50 meters, but still, you will not accelerate too much.
7. Management
Management under iOS differs in low sensitivity and big response time. And if during the flight someone calls you, the quadcopter will hang in the air, and if you decide to chat for a couple of minutes, the drone will simply land on the same point over which it was caught by the bell. Even if there is a lake infested with crocodiles.
In such a case it would be cool to have an auto return to the take-off location.
In addition, there is another inconvenience with management. Now in the App Store there are a lot of applications for managing the drone, they are all very similar in design, and when you start one of the applications, it can offer to launch another one. As a result, on my phone there are 5 applications for Ar.Drone and I still don’t really understand what they are for? This happened because the manufacturer opened the API, and now everyone can write and publish their application for a flight on this quadcopter.
8. Propellers
Suddenly, regular propellers work fine. Sometimes they write that it is a consumable material, and it is better to buy them in batches.
In my case, everything turned out differently: I bought carbon propellers, but eventually I returned to my native propellers and continued to fly with them. The view is already shabby, but they fly normally.
Carbon propellers worked for only a few days, after the next accident the thread of the sleeves was torn off, and new sleeves and bolts were not found separately from the screws.
9. Installing the GPS module
The GPS module is designed to force your quadrocopter to fly in the right directions autonomously. For example, monitor the work of prisoners on the plantations. I fell for it and wanted to test a return to the take-off point, since I only fly in the city and most often over the roofs of the neighboring offices. And you don't want to lose your favorite gift.
This module still seems to me a meaningless and merciless extension. Native software for flight by GPS looks extremely miserable and inconvenient, at least on iOS. I didn’t manage to fly on GPS yet for what reason: the placement of a regular usb connector in Ar.Drone 2.0 is convenient for installing a USB flash drive, but it’s extremely inconvenient to connect a module. You just have to put the module in the inside, it hangs loose there and it interferes with the flights, you cannot make flips.
Once during a flip, under a sudden gust of wind, the battery together with the GPS module fell out, opened the drone cover, which eventually led to a fall and serious injuries of the device.
Here, too, I would like to have another casing in which there would be room for a module.
10. Reset power
After each accident or loss of communication, you need to open the drone cover, disconnect the power supply, and then you can work with the device again. It would be much more convenient to have a separate physical button for this purpose. This is not the most convenient procedure .
11. Small carrying capacity
Although the quadcopter is able to lift the GoPro camera into the air, right after that it becomes not very easy to control it, it is turning from side to side from the slightest breeze. Therefore, I had to use a standard camera, the resolution is quite decent.
12. Bottom cover
The bottom of the quadcopter is protected by a thin lid, which can peel off slightly and close the lower chamber. The device begins to think that there is an obstacle under it, and try to go around it, getting up to hell, knocking on walls, people and scaring the unhappy cats.
By the way, these two huge white things - caps from a bottle with a liquid for cleaning marker boards, after losing one of the supports, I had to invent something very quickly. Double-sided tape and ingenuity saved the situation.
13. Noise
Unlike large drones, there are gears, bushings and a shaft between the engine and propellers, and they cannot be lubricated for objective reasons. The bushing was replaced with a bearing to reduce noise. But after landing on the grass or on a muddy road, the gears will get up, as dust will stick to the grease. You just have to put up with the noise.
The photographs are yellow - native copper bushings, and steel - specially ordered micro-bearings. I'm not sure that this mod objectively reduced the noise, but the impressions of the work improved somewhat.
During the preparation of this post, we planned to shoot a cool video with beautiful Ar.Drone flights in a limited space. But the terrible happened: the drone began to behave inadequately - at first he attacked our lovely operator, having flown from the back, and later he was aiming at the cars parked nearby. Flights had to turn, and the video to collect from what happened.
A small bonus: a blonde crash test with quadrocopter eyes
After this accident, the drone began to go crazy, for example, he performed this circus number quite arbitrarily and without an operator’s command.
Despite all the stories described, I really liked Ar.Drone. This is a very cool toy for the money, which requires care and maintenance. Another accident only ignites interest, and the impressions of the flight are unforgettable. I will definitely repair my drone again and plan to fly more than once before the onset of winter. And I will also try to correct the existing problems, but I plan to tell about this another time.
Source: https://habr.com/ru/post/233873/
All Articles