Brownie Programmable Robot Version 0.4

Open source project and demonstration of the race on the highway.
Let's talk about a topic like programmable robots. What does it mean? This is a complete robot with a sensor system, which can be programmed in a simple way from a computer via usb cable. Take the Arduino IDE development environment and the C ++ language as a basis. Thus, the threshold of entry is low and practically everyone who starts studying programming or already has some knowledge can do robotics. If we use ready-made libraries, classes that implement work with sensors and motors, then we get the system when, in the program code, the robot tells us, for example, that it collides with an obstacle from this or that side, and we ask it to move back, turn left and go on. Or in the program we ask to drive 1 meter ahead, turn 30 degrees to the right, go straight ahead another 2 meters and perform some kind of action. Based on this, we can program the robot already for more complex tasks, getting satisfaction in the form of robot programming training or simply as a hobby. In this case, the wow effect is provided:)
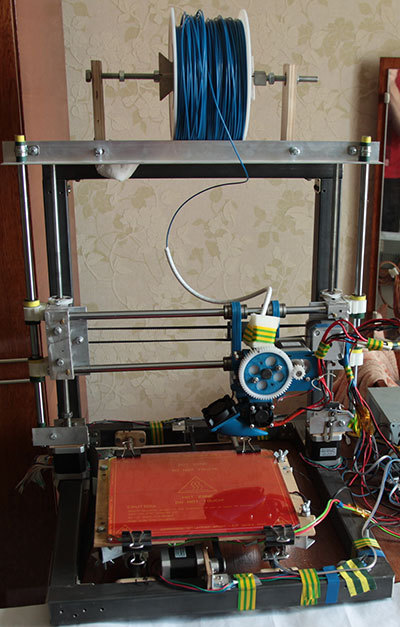
Now let's talk about the robot itself. Since the previous article, the robot has been rebuilt. The design of the chassis of my development, the problems of the previous chassis were taken into account, the new one has good throughput and turns around easier. The chassis plates are laser cut from plexiglass, the remaining parts are printed on a 3d printer of their own design. Motor gear set with a ratio of 1: 120, they give a greater moment at lower revs, the robot has become much easier to turn around.
')
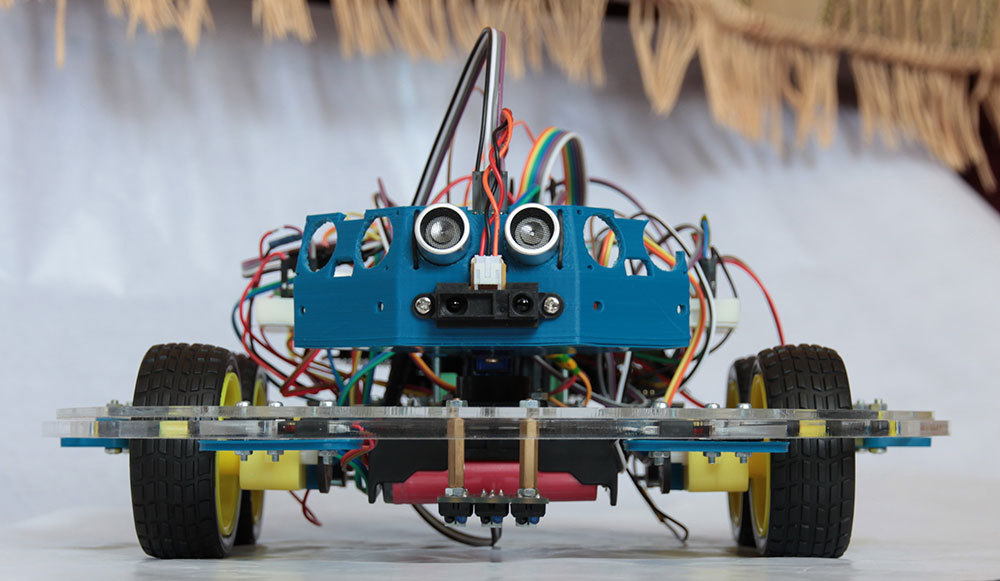
The main feature of the new version is the use of a circular bumper of its own design. It allows to determine the collision from any side with high accuracy. It is made on the basis of 8 microswitches, you can see the design in the photo. Now the robot can drive even without a locator.
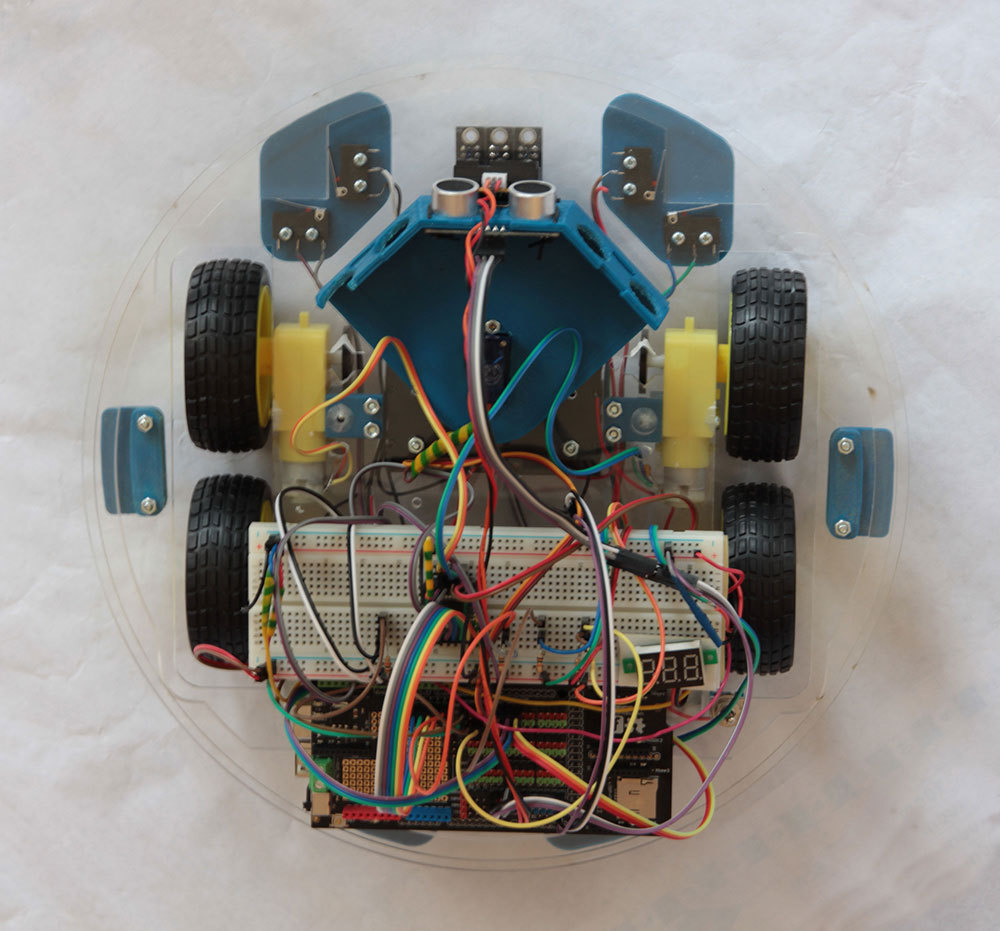
The electronics was also changed, switched to the Arduino Mega ADK because there were not enough inputs / outputs for the arduino Uno.
The new version of the robot has passed stress testing at home in continuous operation for several hours. The new sensor system has shown that the robot can safely navigate in the room even among a pile of scattered things, wires on the floor.
What does it mean? You can program the robot for various tasks of movement, for example: detour of the room, race along the track, competition with other robots, search for markers, etc.
For the demonstration, a task was chosen to drive a robot with a written algorithm of movement along an arbitrarily constructed track line to the finish marked with white sheets of paper. Below you can see this in the video.
The following sensors were used to navigate the highway: ultrasonic range finder, infrared range finder, bumper, encoders on wheels. Based on the data from them, the algorithm builds the route of movement.
The finish is determined by the sensor line, I managed to adjust it so that the majority of flat surfaces in the apartment such as carpets, linoleum, he defines as black. Accordingly, a white sheet of paper as white.
In the next video, I tell you how a robot is simply programmed.
The project open sorce all source codes you can download and take part in the development of the project.
I also attach blueprints for the corel laser cutting and files for 3d printing. If you do not have access to such equipment, you can contact me and I will manufacture these parts for you and send them by mail.
Base (thickness 3-5mm) and bumper (thickness 5mm) for laser cutting.
Details for 3d printing
Sources for Arduino.
Ideally, I now see the future of this project as an open-sorce budget robot to study the programming of robots, both simple robots on arduino and complex ones based on ROS (operating system robots).
About ROS. It gives truly limitless programming possibilities for the robot. I see behind this the future of robotics. At the moment there are two main problems: the lack of budget robots for it and all relevant documentation in English. The first problem is solved by this robot, via bluetooth, wi-fi or via Android phone, it can be linked to the ROS core (I have already tried to connect via a Bluetooth to a laptop with ROS). I don’t know how to solve the second one, I’m slowly learning tutorials in English, but it’s going extremely slowly. If people who are ready to translate into Russian are called, they would be very grateful, ready to organize such work.
Vkontakte group with project news - https://vk.com/club23358759
Robot developer - https://vk.com/alekseyburkov
PS: Remember your opinion is written in the comments under the article is important to me!
Source: https://habr.com/ru/post/228549/
All Articles